电动车产业是电动车、自动驾驶、车联网的三位一体的产业革命,各大电动车品牌在积极推动量产和抢占市场之外,都在积极布局各自的自动驾驶服务。
1.自动驾驶是要将汽车的驾驶责任由人逐步转交给汽车自身,主要包括感知、决策和执行三大核心环节。
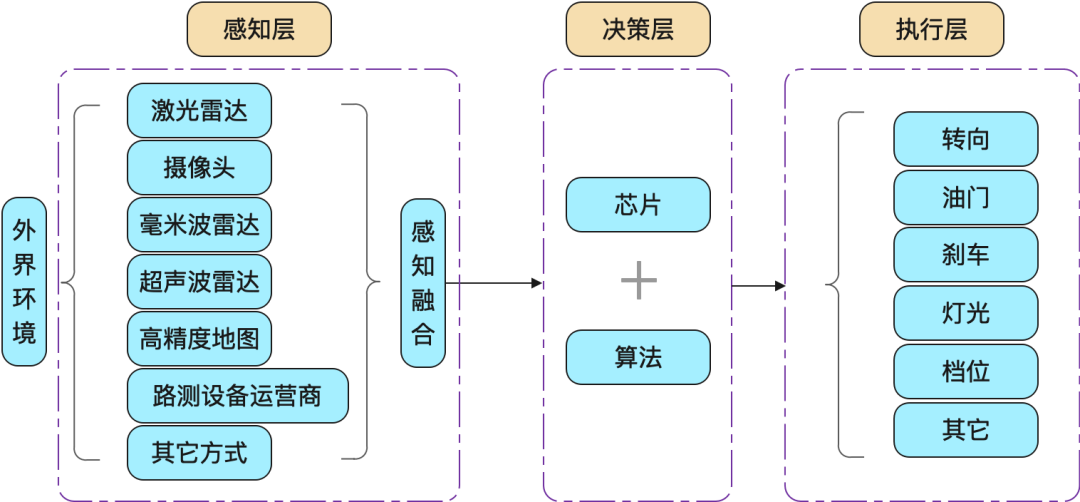
感知环节相当于人的眼睛和耳朵,主要通过车载摄像头、激光雷达、毫米波雷达等车载传感器完成对环境及车辆的感知,并将数据传输到决策层;
决策环节相当于人的大脑,主要通过操作系统、芯片与计算平台等对接收到的数据进行实时处理并输出相应的操作与指令任务;
执行端则相当于人的四肢,将接收到的操作指令执行到动力供给、方向控制、车灯控制等车辆终端部分。
2.环境感知作为智能驾驶的先决条件,其探测精度、广度与速度直接影响智能驾驶的行驶安全。
伴随自动驾驶技术的进步,对于前端环境感知技术的要求将不断提升。
目前自动驾驶感知层解决方案主要分为以特斯拉为代表的视觉系和以Waymo为代表的激光雷达系两种技术路线。
3.视觉系解决方案主要以摄像头为主导,配合毫米波雷达、超声波雷达等元件完成环境感知任务。
之后再结合图像处理与机器学习,对周围环境进行计算与分析,最终指导汽车做出决策。

基于视觉的感知流程(资料来源:《智能网联汽车技术》,德邦研究所)
视觉方案所获数据与人眼感知的真实世界更为相似,图像模式识别为核心流程,较为依赖芯片+算法。
由于摄像头、超声波雷达的价格低廉,因此视觉方案成本优势明显且更易通过车规测试。
此外,摄像头所获的图像数据与人眼感知的真实世界更为相似,形态上最接近人类驾驶,高分辨率、高帧率的成像技术也使得感知到的环境信息更为丰富。
然而,摄像头在黑暗环境中感知受限,精度及安全性有所下降。
而且由于视觉方案在硬件要求降低的背景下,其对软件的要求明显提高,即需要依靠强大的算法才能保证图像处理、命令下达与执行的效率。

在L1、L2辅助自动驾驶阶段,决策权仍在在驾驶员手中,对汽车的软件算法要求相对较低,以Mobileye为代表的视觉方案被多数整车厂采用。
然而,随着智能驾驶迈向 L3 级及以上,自动驾驶平台将接替人的大脑进行驾驶决策,对系统算法和AI能力的要求明显提升,目前仅特斯拉、百度、Mobileye等具备软件和算法基因的厂商完全采用或兼顾视觉方案。
纯视觉解决方案多以黑盒方案为主,且L3及以上自动驾驶升级难度大,传统整车厂搭载意愿不强。
特斯拉凭借“影子模式”与超强算法构筑自动驾驶迭代闭环,其他车企难以复制。
4.激光雷达系解决方案以激光雷达为核心,配合摄像头、毫米波雷达、超声波传感器等元件达到感知环境的目的。

激光雷达可分为激光发射、激光接收、光束操纵和信息处理四大系统。
激光雷达系解决方案的工作原理,是通过激光雷达不断发射激光束,并接收反射回的光脉冲,根据其中的时间差、相位差来确定车与物体之间的相对距离,再通过扫描获取不同俯仰角度获得高度信息,进而通过软件算法去做3D建模,实现环境实时感知及避障功能。
激光雷达融合高精地图方案可有效弥补视觉方案环境依赖度高、算力需求大、探测距离短的缺陷,其性能优势十分贴合整车厂追求高阶自动驾驶的需求。
大多整车厂已将激光雷达列为面向L3级及以上级别自动驾驶不可或缺的感知器件。
目前激光雷达市场主流的分类方式为通过测距原理、激光发射、激光接收、光束操纵和数据处理五个维度进行分类。每种分类方式均有不同细分技术路线,因而在最终产品的工作原理、效果呈现和生产成本等方面均有所不同,这里主要介绍几种常用的。
(1)按照测距原理可将激光雷达细分为:
三角测距、飞行时间测距ToF和调频连续波FMCW。
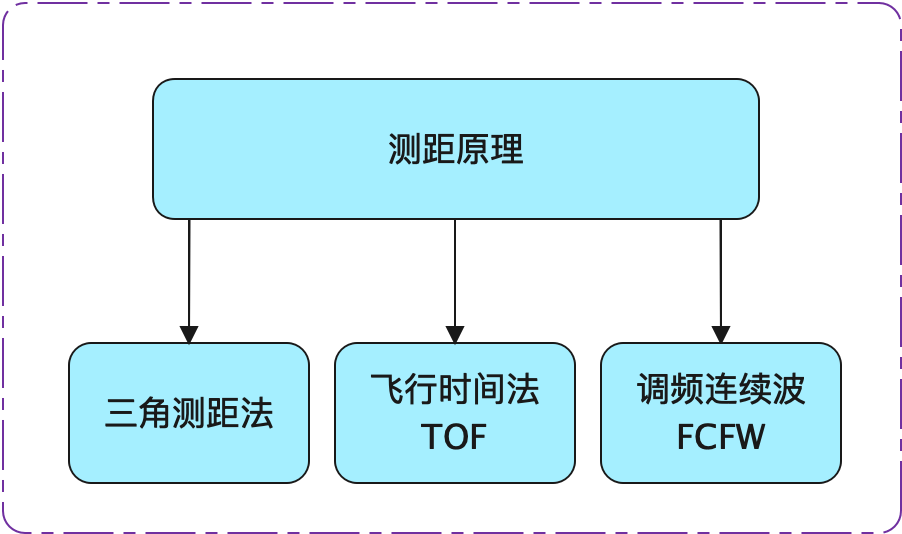
三角测距法
受制于较远距离分辨率下降,目前多用于近距离室内导航解决方案,三角测距激光雷达难以配套自动驾驶汽车。
ToF激光雷达技术成熟度高,短期仍将是配套汽车主流方式。
FMCW激光雷达理论性能优异,可以提供包含速度信息的4D图像,能够为自动驾驶系统提供更清晰的环境感知能力,长期有望成为装车新方向。
以测距原理来看,短期看好ToF放量,长期关注FMCW优质性能落地。
(2)
根据激光光源波长主要分为905nm和1550nm两类
除去两种波长的物理性能各有优劣之外,目前最为重要的一个差异存在于对人眼是否安全。
905nm光源是最常用的激光光源波长,但处于人眼可吸收光谱中,因而存在安全问题,而1550nm远离人眼可吸收可见光光谱波长,因而对人眼安全,但需要使用高价的铟镓砷作为探测器的衬底材料导致成本较高。
1550nm波长位于人眼安全范围且性能较为优异,伴随工艺流程技术进步有望迎来量产降本装车。
(3)根据光束操纵方式不同又可将激光雷达分为机械式、半固态和固态,其中半固态方案主流方向为微振镜式MEMS与转镜式,固态方案目前以OPA和Flash方案为主。
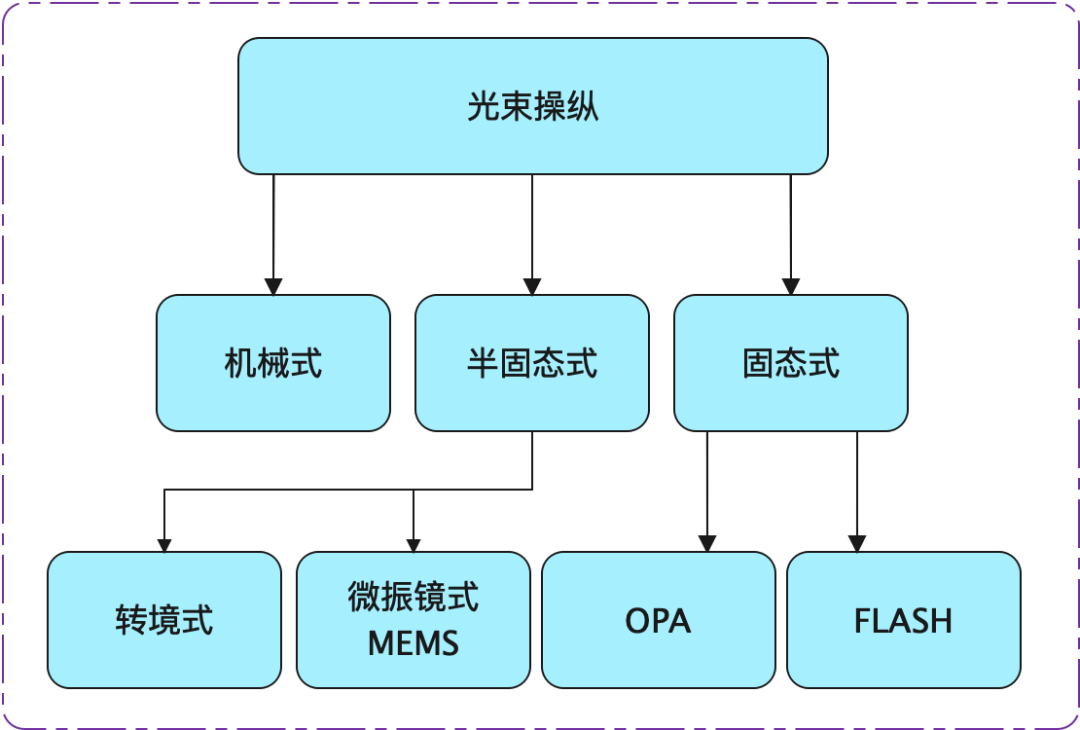
机械式因成本及外观因素目前多应用于无人驾驶测试项目。
MEMS方案综合优势明显,有望搭载汽车商用。微振镜式主要采用MEMS具有良好的性能、探测距离及高分辨率,同时小巧轻便、坚固可靠且成本较低,目前比较适合作为车载激光雷达配套方案。
转镜方案最早通过车规,短期或将与MEMS并存。缺点在于功耗高、稳定性不足和光源能量分散,高扫瞄精度、扫描密度可调节、探测距离远、探测角度大是其优势,未来或将成为自动驾驶配套搭载的主要选择之一。
OPA即光学相控阵技术,产业链尚处起步阶段,短期暂无配套量产可能。
Flash型激光雷达是目前唯一不存在扫描系统的方案,但探测距离存在短板,导致Flash激光雷达配套汽车应用受限。
从光束操纵方式看,短期看好半固态方案放量,长期或将逐步向固态演化。
强大芯片算力是提升图像处理准确性与安全性的基础,特斯拉完全自主研发的 FSD全自动驾驶芯片,单片单芯片算力72TOPS,若要实现L5级完全自动驾驶,系统整体算力应至少达到500TOPS,短期内通过硬件层面弥补摄像头和激光雷达在高级别自动驾驶的差距可行性较低。
其次,神经网络算法壁垒较高,短期难以达到自动驾驶需求。
视觉摄像头的感知方式精度较低,更加需要先进的图像处理算法的支撑,同时需海量样本数据训练学习,而数据的获取及算法演绎壁垒极高。
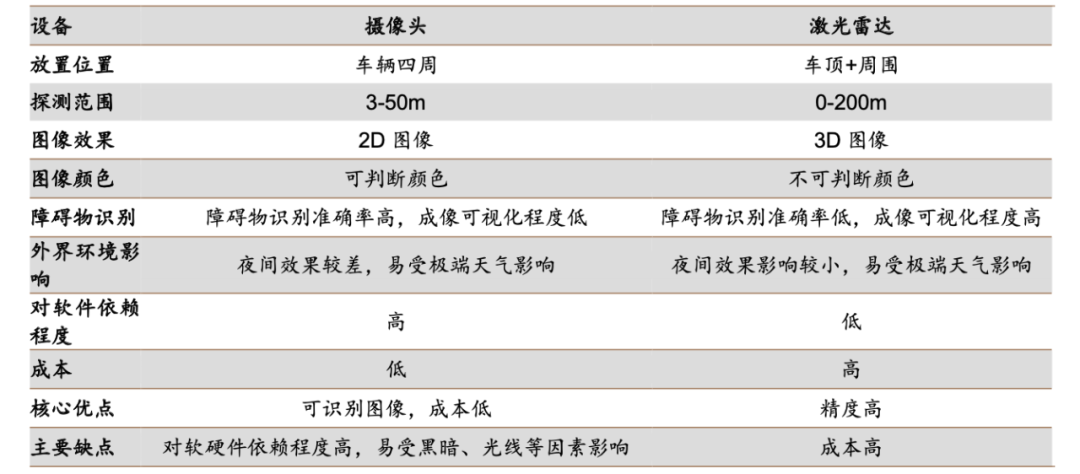
激光雷达方案路况模型精度高,可大幅降低软硬件端分析难度,且受夜间因素影响较小,
性能优
势明显。
目前最大的障碍就是成本较高,但是随着激光雷达量产能力的扩大,激光雷达价格降幅还有很大空间,短期之内有望下探至装车水平。










