|
|

|
新境智能交通技术(南京)研究院招聘算法工程师 点云PCL · 公众号 · · 3 年前 · |

|

|
【VINS论文笔记】系列之回环检测与重定位 点云PCL · 公众号 · · 3 年前 · |
|

|
深圳市镭神智能招聘点云算法工程师 点云PCL · 公众号 · · 3 年前 · |
|

|
什么?你还不知道这些能力是你成为算法工程师必备的! 点云PCL · 公众号 · · 3 年前 · |
|

|
【系列文章】面向自动驾驶的三维点云处理与学习(5) 点云PCL · 公众号 · · 3 年前 · |
|
|
|
【系列文章】面向自动驾驶的三维点云处理与学习(4) 点云PCL · 公众号 · · 3 年前 · |
|

|
热点激光雷达企业介绍 点云PCL · 公众号 · · 3 年前 · |
|

|
带你了解AR眼镜中的光学标定 点云PCL · 公众号 · · 3 年前 · |
|
|
当语义分割遇上SLAM! 点云PCL · 公众号 · · 3 年前 · |
|

|
【系列文章】面向自动驾驶的三维点云处理与学习(3) 点云PCL · 公众号 · · 3 年前 · |
|

|
【系列文章】面向自动驾驶的三维点云处理与学习(2) 点云PCL · 公众号 · · 3 年前 · |
|

|
立体视觉+惯导+激光雷达SLAM系统 点云PCL · 公众号 · · 3 年前 · |
|

|
【系列文章】面向自动驾驶的三维点云处理与学习(1) 点云PCL · 公众号 · · 3 年前 · |
|

|
PDAL点云处理库介绍 点云PCL · 公众号 · · 3 年前 · |
|
|
你造吗?基于Python可以创 造一个专家级神经网络! 点云PCL · 公众号 · · 3 年前 · |
|

|
基于点线特征的激光雷达+单目视觉里程计 点云PCL · 公众号 · · 3 年前 · |
|
|
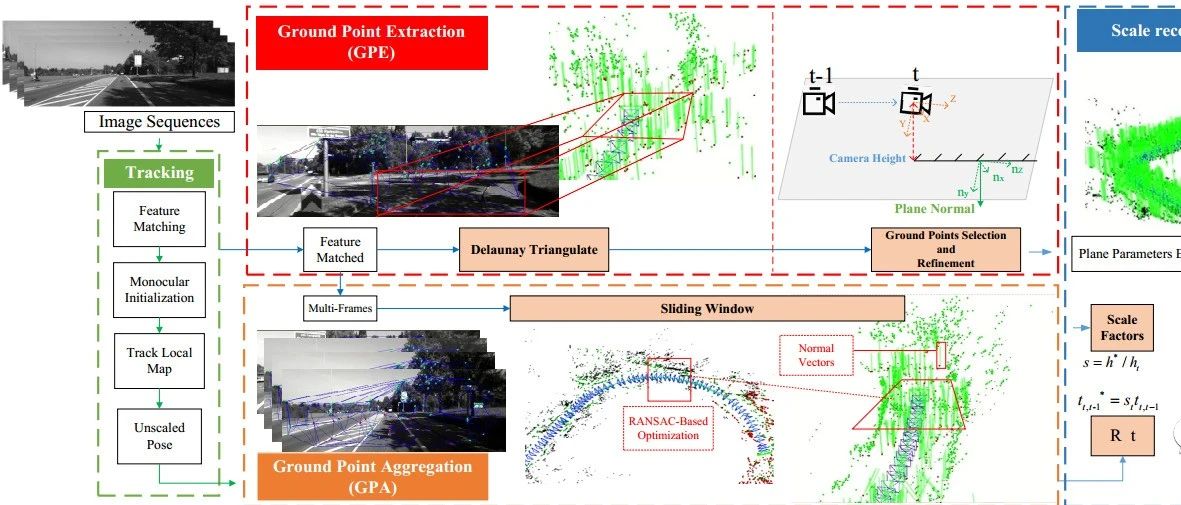
基于平面几何精确且鲁棒的尺度恢复单目视觉里程计 点云PCL · 公众号 · · 3 年前 · |
|

|
【VINS论文笔记】系列之视觉惯性联合初始化 点云PCL · 公众号 · · 3 年前 · |
|