一、Linux多线程DEMO介绍
本文的DEMO是对多线程知识点的回顾,因为多线程技术在我们平常开发中经常用到。今天介绍的DEMO是通过发送信号量去控制线程的运行和停止,相当于我们通过输入一个指令让某个线程启动和停止。
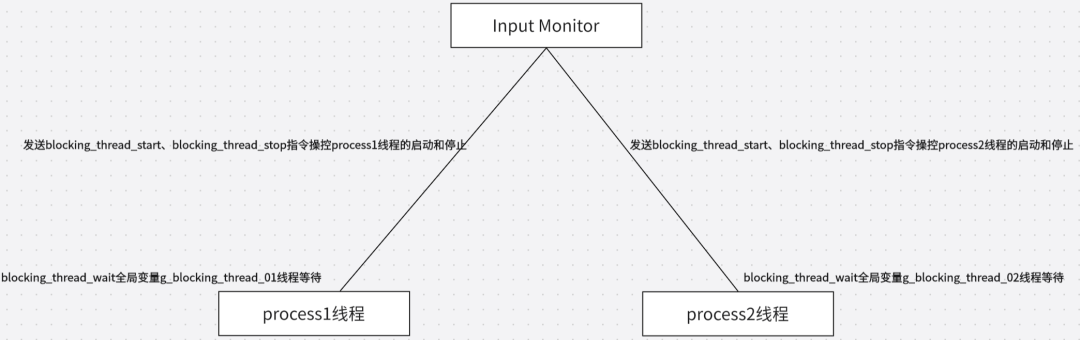
二、整个DEMO的流程框图
三、整个DEMO的代码模块
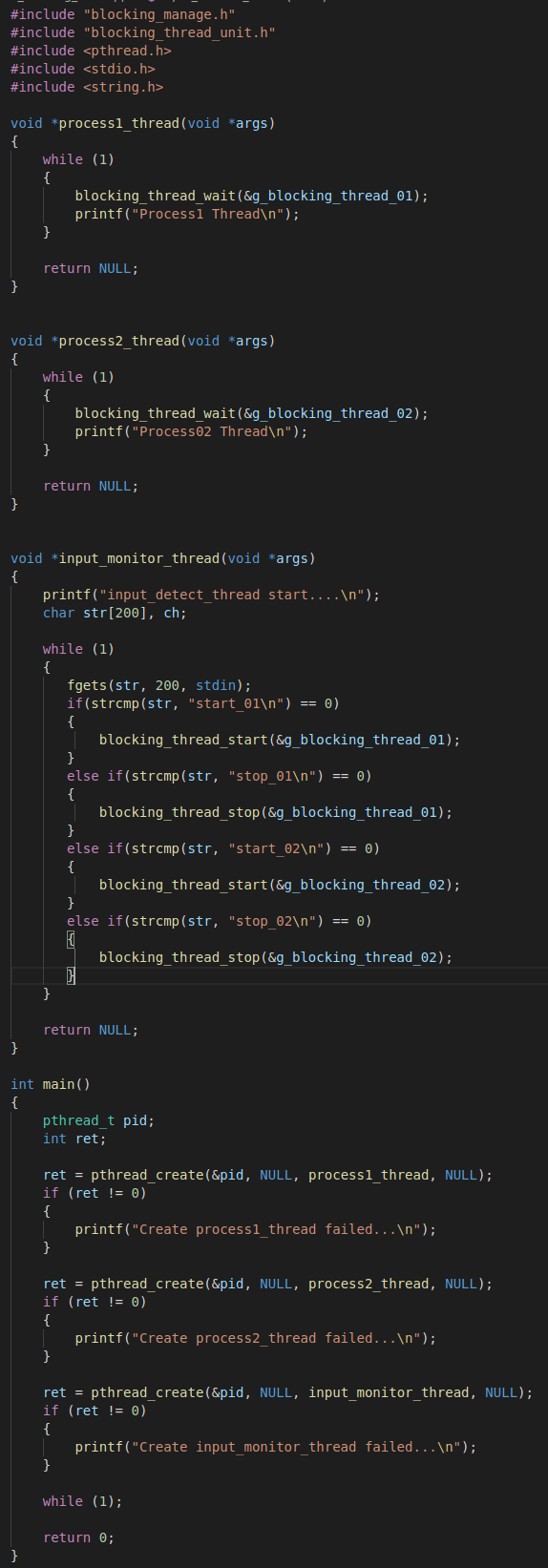
1、process1_thread、process2_thread线程的讲解:
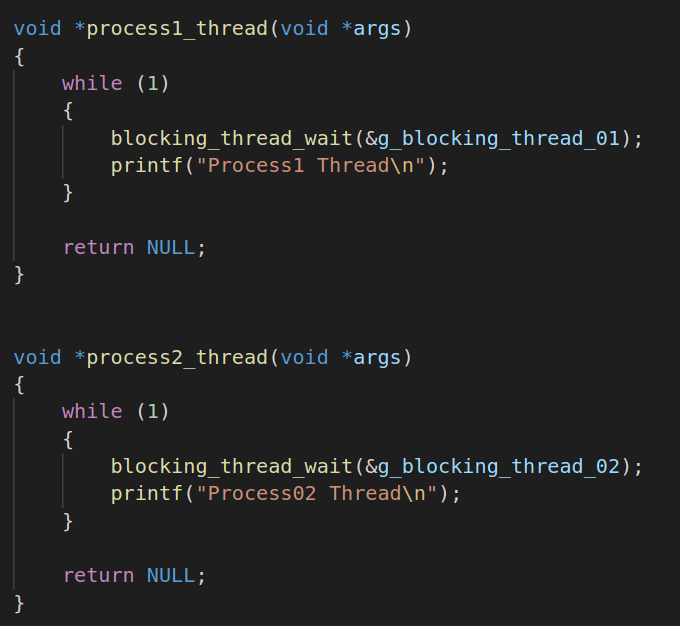
process1_thread线程和process2_thread线程,分别用blocking_thread_wait函数进行阻塞。相当于这两个线程默认是挂起阻塞起来,然后等着input_monitor线程发送指令。process1_thread线程主要由g_blocking_thread_01变量去控制它的运行状态,process21_thread线程则是由g_blocking_thread_02变量去控制它的运行状态。
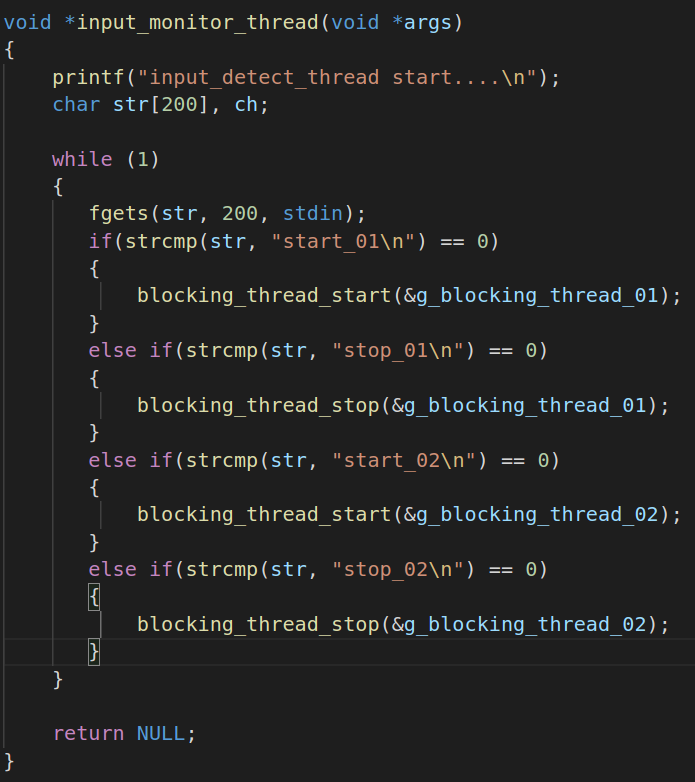
2、input_monitor线程的讲解:
input_monitor线程的主要用途是,发送指令去操控process1_thread线程和process2_thread线程的运行。
input_monitor总共可以操控四个指令:start_01指令、stop_01指令、start_02指令、stop_02指令。
-
start_01指令
:主要是利用blocking_thread_start去启动process_thread1线程,此时process1_thread线程将会不断打印Process1_Thread字段。
-
stop_01指令
:主要是利用blocking_thread_stop去启动process_thread1线程,此时process1_thread线程将会停止打印Process1_Thread字段。
-
start_02指令
:主要是利用blocking_thread_start去启动process_thread2线程,此时process2_thread线程将会不断打印Process02_Thread字段。
-
stop_02指令
:主要是利用blocking_thread_stop去启动process_thread2线程,此时process2_thread线程将会停止打印Process2_Thread字段。
3、线程控制模块blocking_thread_unit.c的讲解:
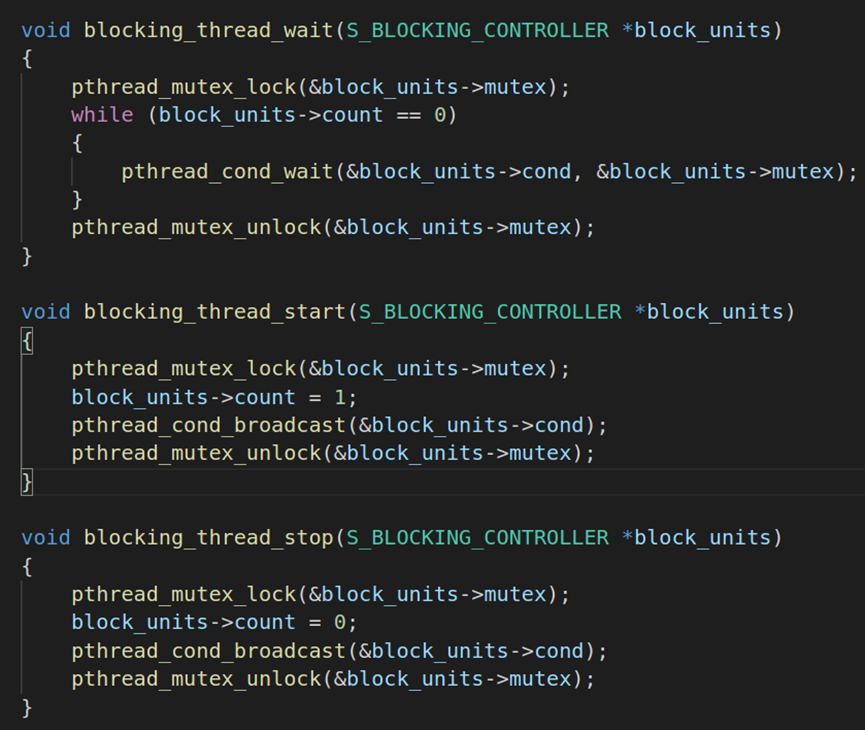
blocking_thread_unit.c有三个函数,分别是: blocking_thread_wait、blocking_thread_start、blocking_thread_stop。
-
blocking_thread_wait
主要功能是:等待线程阻塞,若收到的count一直是0则会一直阻塞在那里,若收到一个非0的值则会解除阻塞,让线程往下走。使用的api是
pthread_cond_wait
线程等待函数。
-
blocking_thread_start
主要功能是:开启对应的线程,把线程的count设置成1,并且使用
pthread_cond_broadcast
去通知对应的线程,要开始线程的打印。
-
blocking_thread_stop
主要功能是:停止对应的线程,把线程的count设置成0,并且使用
pthread_cond_broadcast
去通知对应的线程,要停止线程的打印。
g_blocking_thread_01
和
g_blocking_thread_02
两个全局变量的讲解:

这里的控制线程主要用到了两个全局变量对两个线程进行控制,分别是
g_blocking_thread_01
和
g_blocking_thread_02
。
g_blocking_thread_01
主要是控制
process1_thread
线程的停止和开启,
g_blocking_thread_02
主要是控制
process2_thread
线程的开启和停止。
4、整个DEMO工程的代码:
作者:陈工










