随着激光雷达传感器出现在智慧城市、无人机、电影制作、汽车、手机等领域,点云数据自我上次在
2013
年发表相关文章以来已经有了显著的发展,我觉得现在是时候重新审视这种了不起的数据类型了。
现如今,点云通常以毫米级的精度来表现景观、建筑、物体等
.
点云密度更大,质量更高,而且无处不在。你会发现激光雷达扫描仪遍布许多行业,从航空航天、电信到公用事业。让我们看看世界各地的公司是如何使用激光雷达的,以及如何使用数据集成工作流来转换、绘制和处理点云数据。我们将讨论
4
个主要领域
:
·
将点云与其他数据集成,例如制作彩色的
3D
模型或生成易于共享的地图。
·
通过更新属性值
/
特性、缩减密度或改变结构来对点云进行预处理。
·
通过剪切、分割等方法提取或过滤某些点。
·
通过计算或表达式分析点云。
[
网络研讨会
]
提高激光雷达工作流程的
5
种方法
首先应该是激光雷达技术层
使用点云涉及几层技术
:
激光雷达扫描、点云数据的存储,以及处理和分析数据的数据集成平台。这篇博客主要讲的是数据集成部分,它是用
FME
完成的。
FME Workspaces
以特定的方式读取、写入和转换点云数据
——FME
将点云按单一的特征这种最好的方式进行处理,而不是单独处理每个点。然后,可以使用自动化将
Workspaces
作为基于事件的工作流的一部分来运行,这既减少了手工工作,又释放了时间和资源。

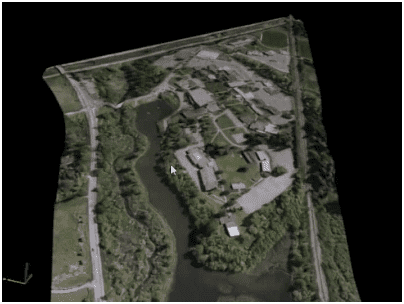
这是FME Workspace在读取和转换一个LAS点云。用户正在“可视化预览”窗格中检查源数据。
1.
集成数据类型以获得更有价值的数据集
常将点云转换成其他常用数据类型,例如,如果您想将其加载到不支持点云的软件中,您可以将其转换为数字高程模型,将其作为光栅、表面模型或点
/
多点几何图形进行共享。
FME
可以转换
19
种不同的点云格式
(
截至
2021
年
)
和数百种其他数据格式,如
GIS
、
CAD
、栅格、数据库和我们集成库中列出的所有其他数据格式。
卡尔加里市使用
FME
将激光雷达扫描数据转换为
DEM
和多斑块地理数据库,然后使用这些数据计算整个城市的海拔高度。这可以让他们在洪水期间快速检查建筑高度。
点云还可以与其他点云结合使用
(
这是用户执行的第二种最常见的点云使用方法
)
,以及和用于映射、共享、分析等的其他数据类型结合使用。例如,将点云数据与栅格集成使您能够添加颜色,而与
CAD
或
GIS
数据集成使您能够使用额外的信息来增加点云。
DGN
格式的CAD文件用于定义该E57点云的项目边界,ECW光栅用于定义颜色。结果被转换成一个表面,并导出为3D PDF,便于共享。
1.1
创建
3D
模型
许多用户想创建
3d
模型表面的点云。事实上,表面模型转换是最流行的点云任务之一。根据数据的性质和想要的结果,可以使用一些
FME
转换器来完成这一任务。
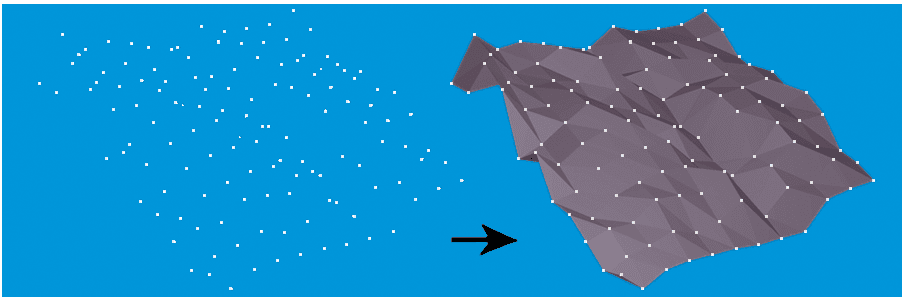
tinggenerator
是一个可以通过点来创建表面模型的转换器。
荷兰的
Genovum
开发了一种工具,可以从
2D
和激光雷达输入的数据生成
3D
模型。然后,这些
3D
模型被用于城市规划。
聊点有未来感的,奥斯陆市制造了一个比例为
1:1000
的
3D
打印的城市模型。从城市的激光雷达扫描开始,他们使用
FME
来过滤地形,用
geoTIFF
纹理化,然后将建筑转换成
3D
模型,并将它们附加到地形上。打印的
3D
模型长
7.6 x 4.5
米。
2.
点云的预处理、清理和重构
激光雷达数据的预处理涉及多个步骤。首先,清理、检查数据的正确性、完整性和关联性在任何工作流中都很重要。接下来,同样重要的是更新分析点云来获取包含所需的所有信息。
激光雷达的工作流程同样涉及许多处理步骤。
RIEGL
激光测量系统使用
FME
以自己的
RDB
格式和各种方式处理激光雷达数据,用以去除无关点、回声和偏差等。在一个林业用例中就涉及到表面提取,标准化数据集中的高度,计算平均树高和点云统计,并在
Shapefile
中输出
3D
瓦片。

预处理点云-从我们的激光雷达网络研讨会截的图。
2.1
在正确的坐标系下工作
如果您对点云映射感兴趣,可以使用
CsmapReprojector
转换器将激光雷达数据转换为另一个坐标系统
(UTM, StatePlane
等
)
。例如,
WSP
是一家地理和工程公司,它使用
FME
对激光雷达数据进行坐标系统重投影,以及其他许多任务。
2.2
添加颜色
通常,点云需要着色。一种常用的方法是获取栅格的
RGB
值,并设置每个点的颜色。有许多基于表达式、计算和外部数据集的方法来更新点云的颜色。
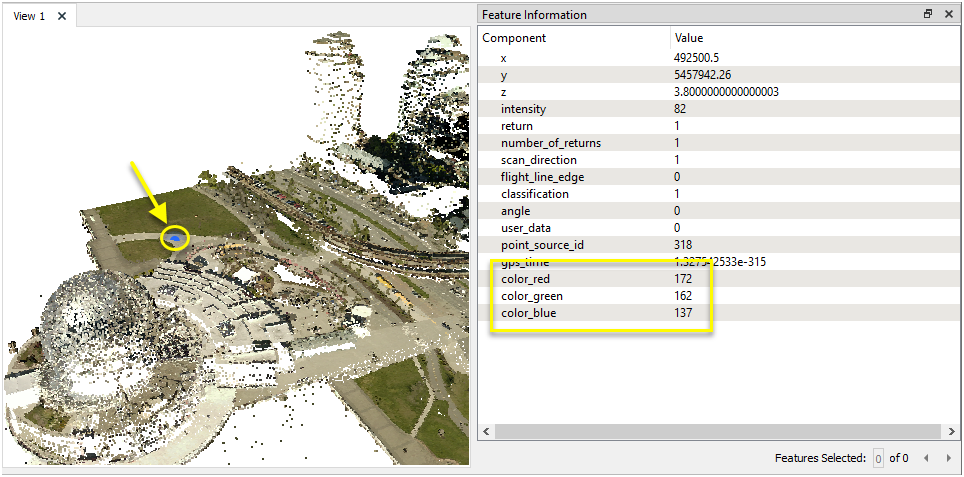
这个点云已经通过从光栅中获取RGB值来着色。用户正在检查FME中的一个点以查看其RGB值。
2.3
减少大小
抽稀点云是通过减少点的数量
(
例如删除每
n
个点
)
来减少点云体量的一种方法。这样做通常是为了加快大规模数据的处理时间。
通过均匀地从数据集中删除点,可以使抽稀点云。
在不修改数据的情况下加快处理时间的一种方法是在处理期间瓦片化数据集。瓦片化一个大点云进行并行处理是使
FME
工作流运行更快更好的方法。瓦片化也是共享或交付大型点云的好方法。
其他减少点云大小的方法包括剪切、切片和分割,这些将在下面讨论。
3.
只提取或过滤某些点
有几种方法可以从点云中提取所需的区域。这是一个常见的任务,因为点云太大了,处理和共享不必要的数据是一种浪费。最好只提取感兴趣的区域。
裁剪点云是用户执行的最常见任务之一。裁剪点云指的是你可以定义一个边界并且只保留边界内的点。剪切形状可以是










