论文主要解决structure-from-motion (SfM) 中高效鲁棒的三维相对旋转的平均问题。该工作利用三维旋转的李群(Lie group)结构,并使用两种方法解决鲁棒的大尺度旋转平均问题。首先使用高效可扩展的,并且对于外点鲁棒的l1优化器求解。然后将l1求解的结果作为之后迭代加权最小二乘(IRLS)的初值进行求解。实验表明该方法明显优于state-of-the-art的DISCO[1]和Weizfeld[2]方法。
1. 提出了L1RA方法,一种解决三维相对旋转平均的问题的高效且对外点鲁棒的算法。
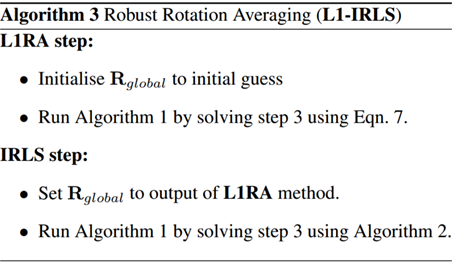
2. 在L1RA方法的基础上提出了L1-IRLS方法,进一步提升了精度和收敛速度。
3. 在数据集上的测试表明该方法在速度,精度,错误分布和收敛速率等指标上均优于当时state of the art的方法([1]和[2])
。
论文对于SfM 中的三维相对旋转的平均问题,提出了一种名为
L1-IRLS
的高效鲁棒的求解方法。论文首先提出了使用
李代数
求解相对旋转平均问题的通用算法。然后在具体的求解方法中,首先提出了l1范数的
L1RA
方法。接下来使用L1RA求解的结果作为初值,使用了
IRLS
方法继续求解该问题。
在SfM中两帧的相对旋转Rᵢⱼ可以用绝对旋转Rᵢ和Rⱼ表示,写作:
所有3×3旋转矩阵可以构成
特殊正交群SO (3)
,是
李群
,其对应的
李代数
由旋转的
轴角
表示:
根据上述的对应关系,可以将李代数下求解旋转平均算法描述如下:
论文主要列举了一些现有的state-of-the-art方法求解上述算法中的第三步,包括使用改进的l2范数求解方法,DISCO[1]方法以及Weiszfeld[2]方法。
4、l1旋转平均
使用l1优化可以在有外点的情况下准确高效的估计x:
在外点存在的情况下使用了l1优化求解后,可以进一步使用l2求解进一步提升效果。当l1求解的结果足够精确,可以把它作为l2估计时的输入。文章使用了鲁棒的迭
代加权最小二乘法(IRLS)
来迭代求解。
结合上面两种方法,论文提出了
L1-IRLS
的完整版本:
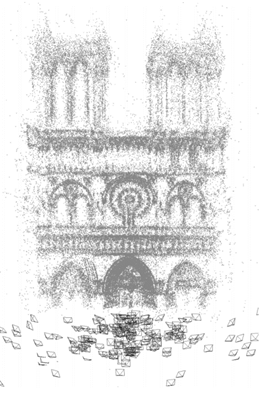
本论文对Notre Dame数据集的重建结果如图所示:
本篇论文算法(包括L1RA和L1-IRLS)与state-of-the-art的DISCO[1]和Weizfeld[2]方法在Notre Dame和Quad两个数据集上的时间与精度比较如下:
本篇论文算法(包括L1RA和L1-IRLS)与state-of-the-art的DISCO[1]和Weizfeld[2]方法在Quad数据集上的在错误分布,精确与召回率以及收敛速率上的比较如下:
SfM中的相对旋转平均是一个非常重要的问题。传统的方法直接使用l2求解,对于外点非常敏感,从而导致错误的结果。本文首先提出了使用李代数求解的步骤,解决了使用旋转矩阵时问题带约束的麻烦。然后提出了两步方法,先使用l1优化,很好的提升了在外点存在的情况下,相对旋转平均的鲁棒性和高效性。接下来使用IRLS方法,并将l1的求解结果作为初值,进一步提升了整个求解的速度,精度和收敛速率。
该方法在数据集上的测试结果都超过了当时的state-of-the-art,同时,目前大部分的global SfM的代码都选择该算法求解绝对旋转,可以看出该方法是通过了实际数据使用的考验,是一个公认的相对比较鲁棒和高效的方法。
[1] D. J. Crandall, A. Owens, N.Snavely, and D. Huttenlocher. Discrete-continuous optimization for large-scalestructure from motion. In CVPR, 2011.
[2] R. Hartley, K. Aftab, and J.Trumpf. L1 rotation averaging using the weiszfeld algorithm. In CVPR, 2011。
[3]V. M. Govindu. Lie-algebraicaveraging for globally consistent motion estimation. In CVPR, 2004.
[4]S. N. Sinha, D. Steedly, and R. Szeliski. Amulti-stage linear approach to structure from motion. In RMLE 2010Workshop,2010.









