欢迎大家回到泡泡!
本期的泡泡是曾志文主讲的主题为“
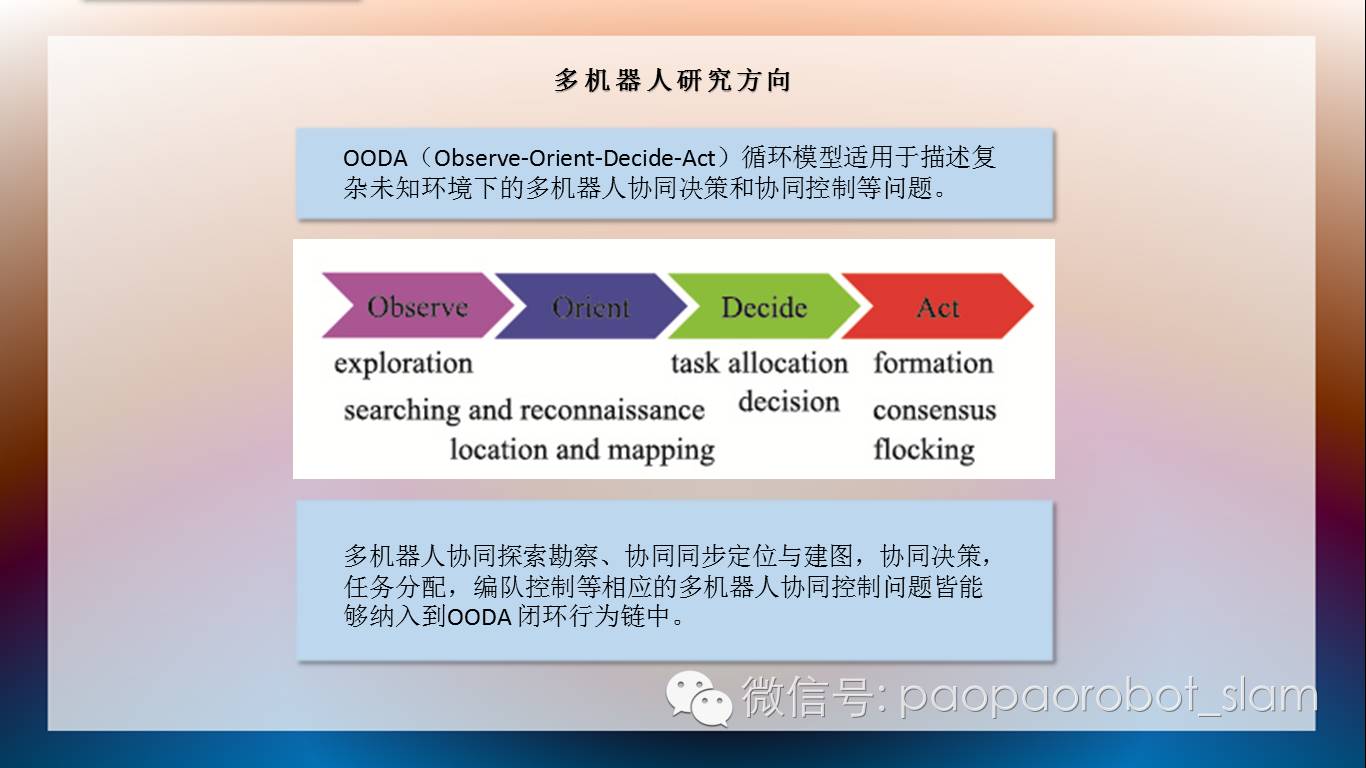
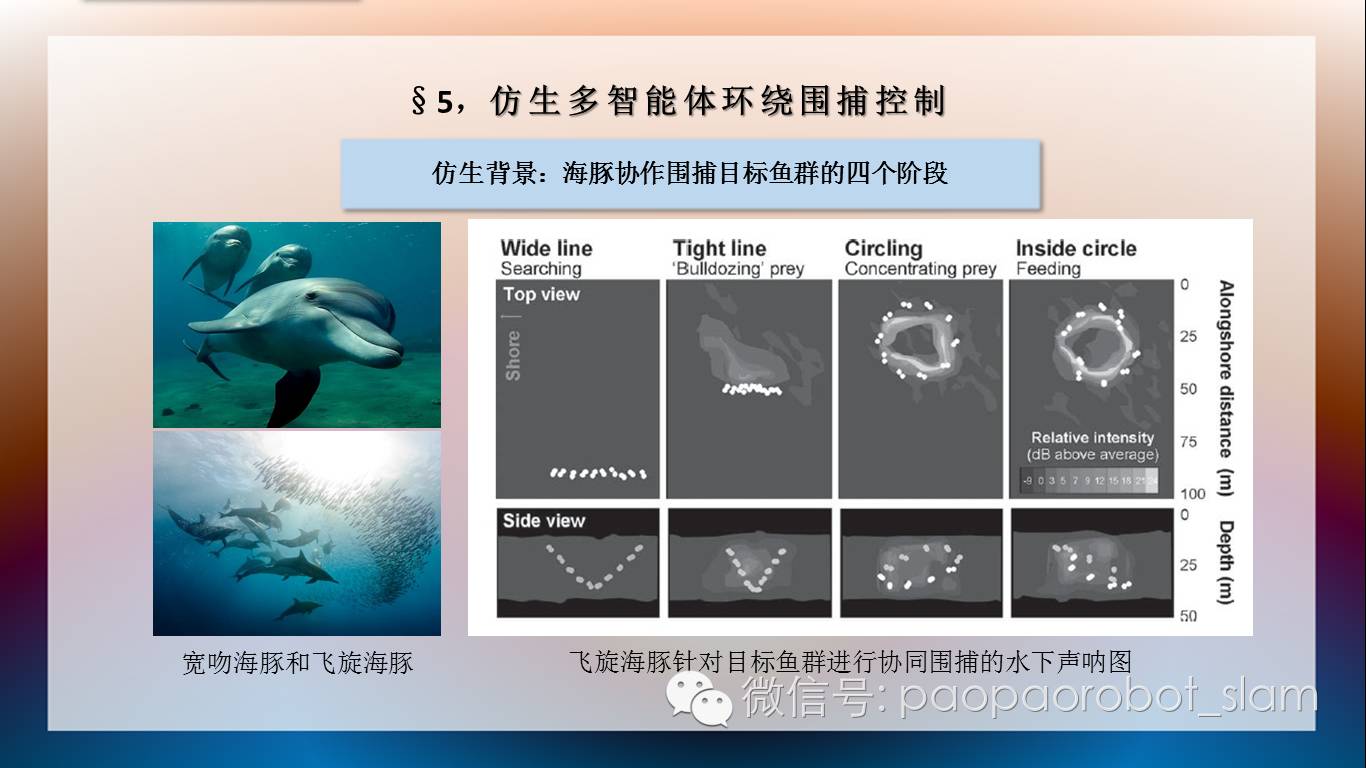
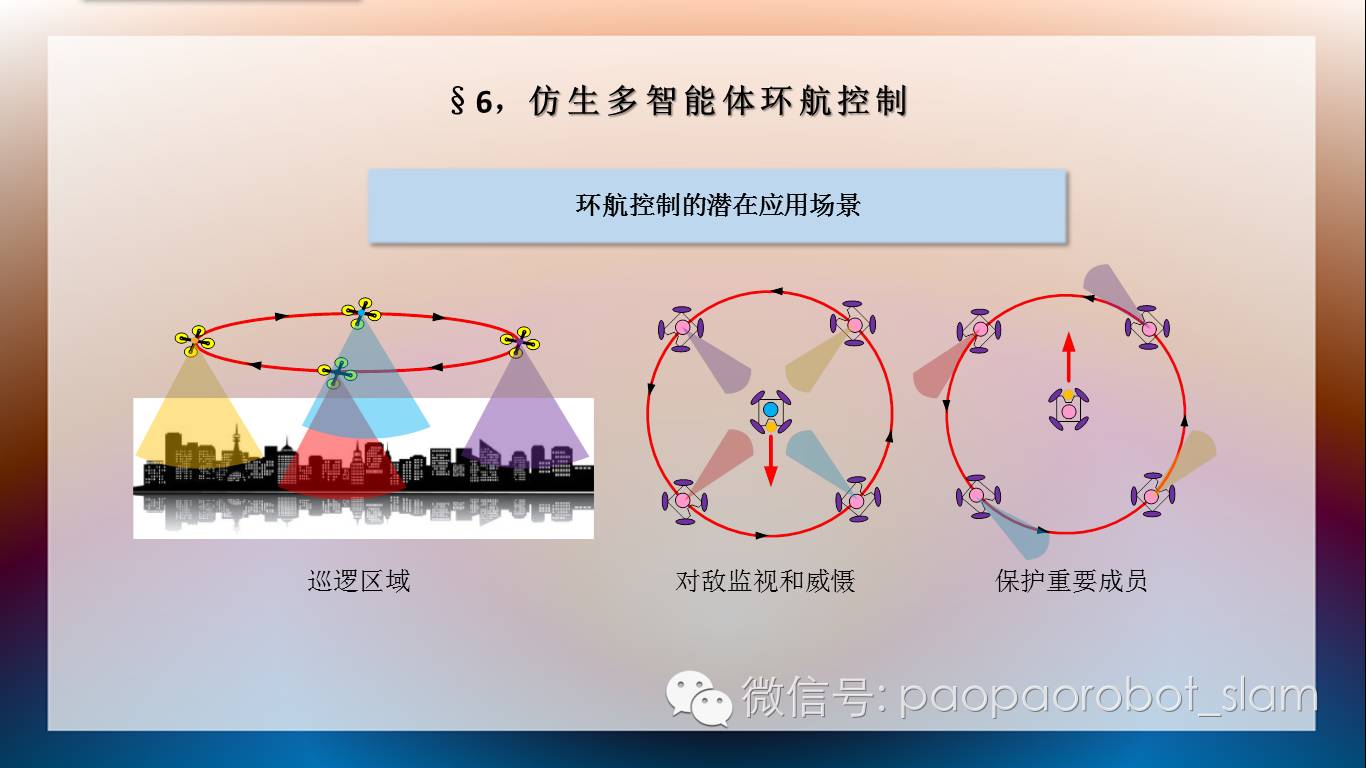
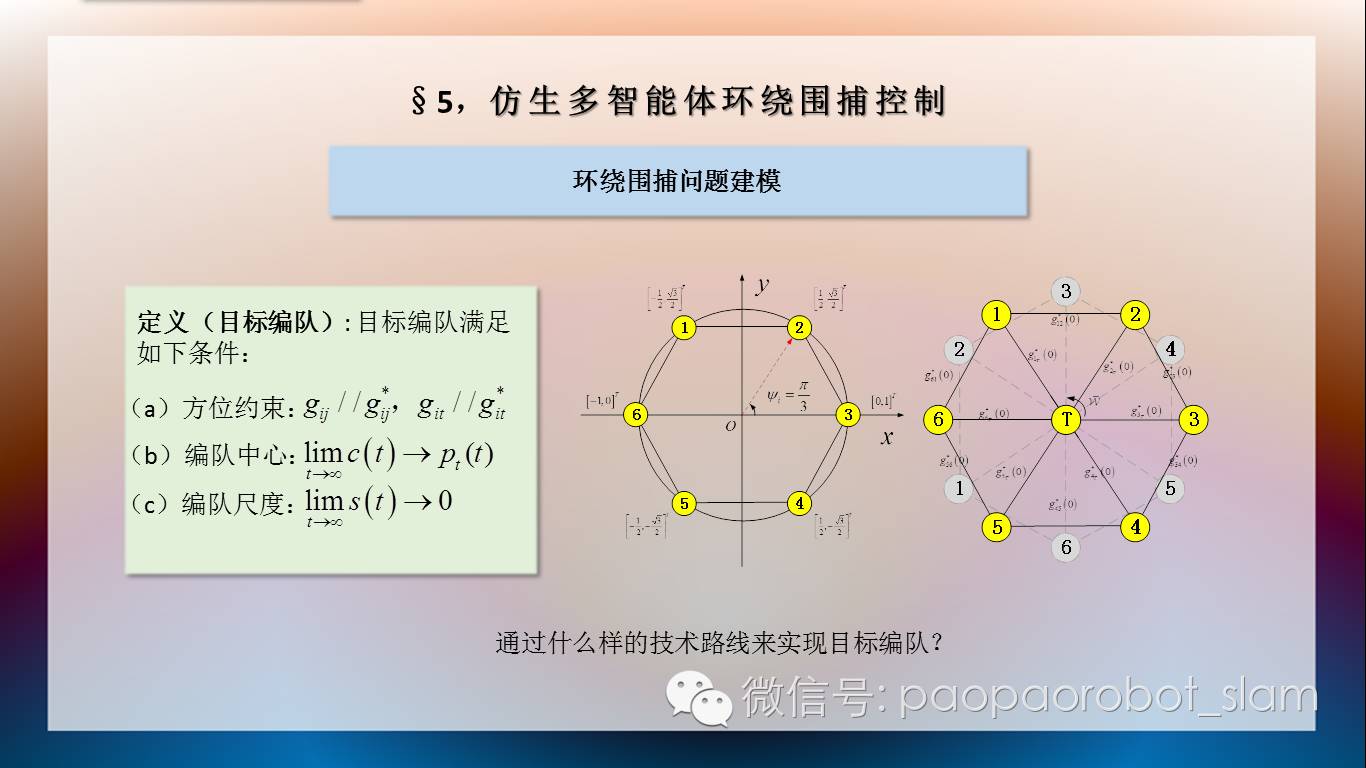
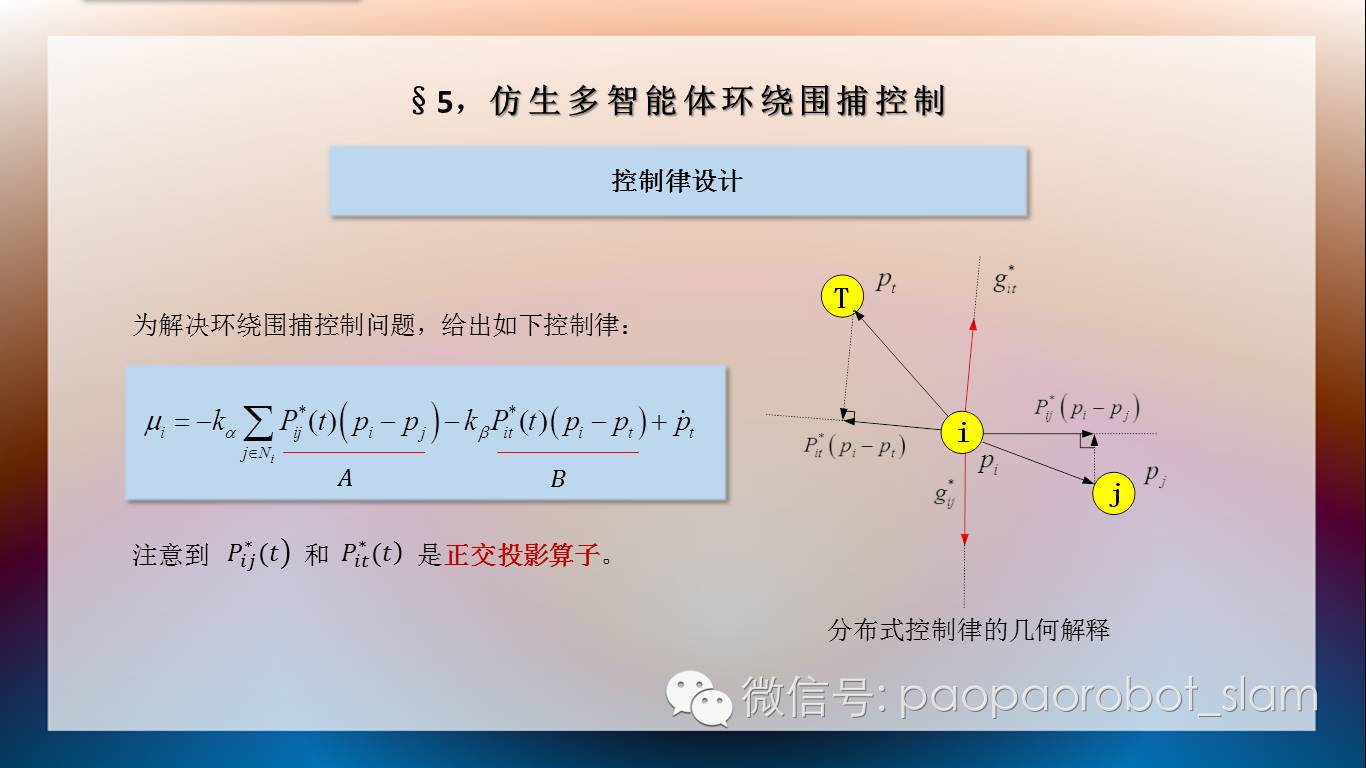
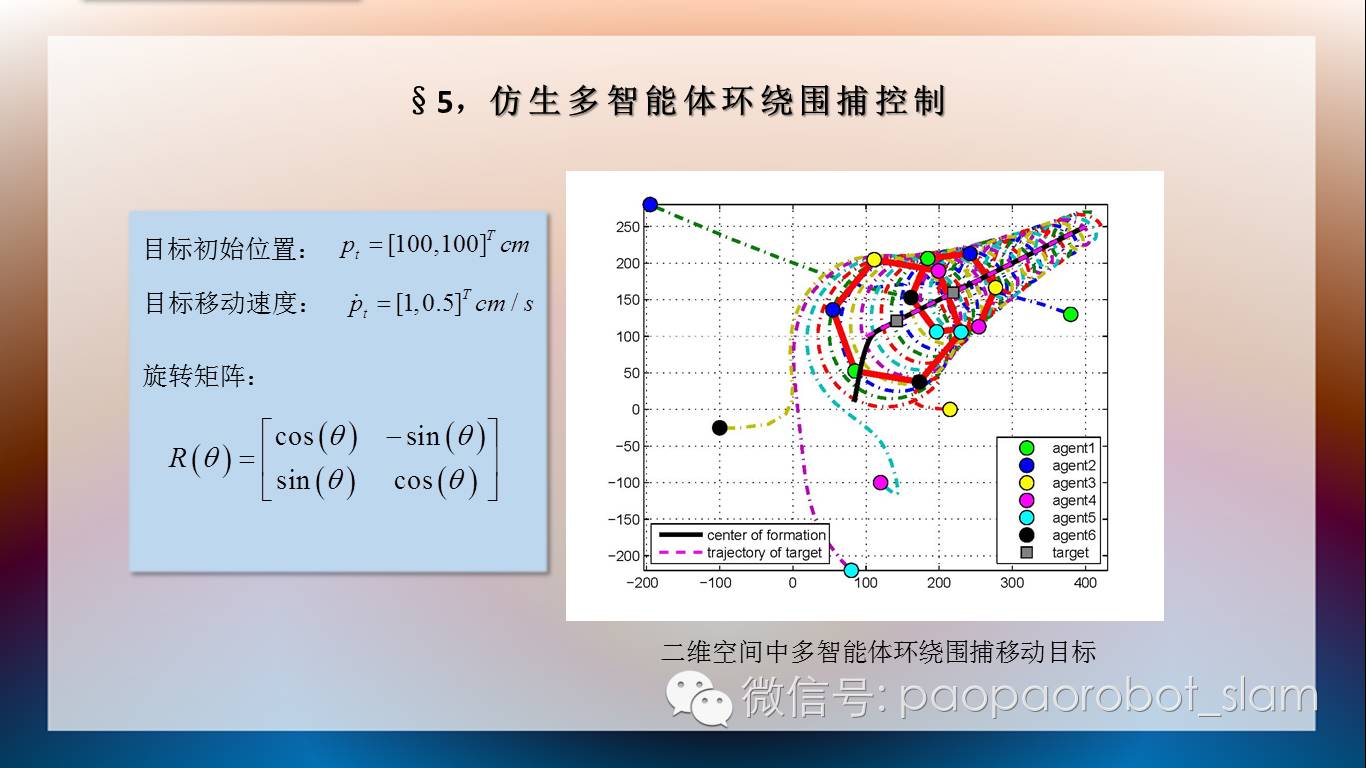
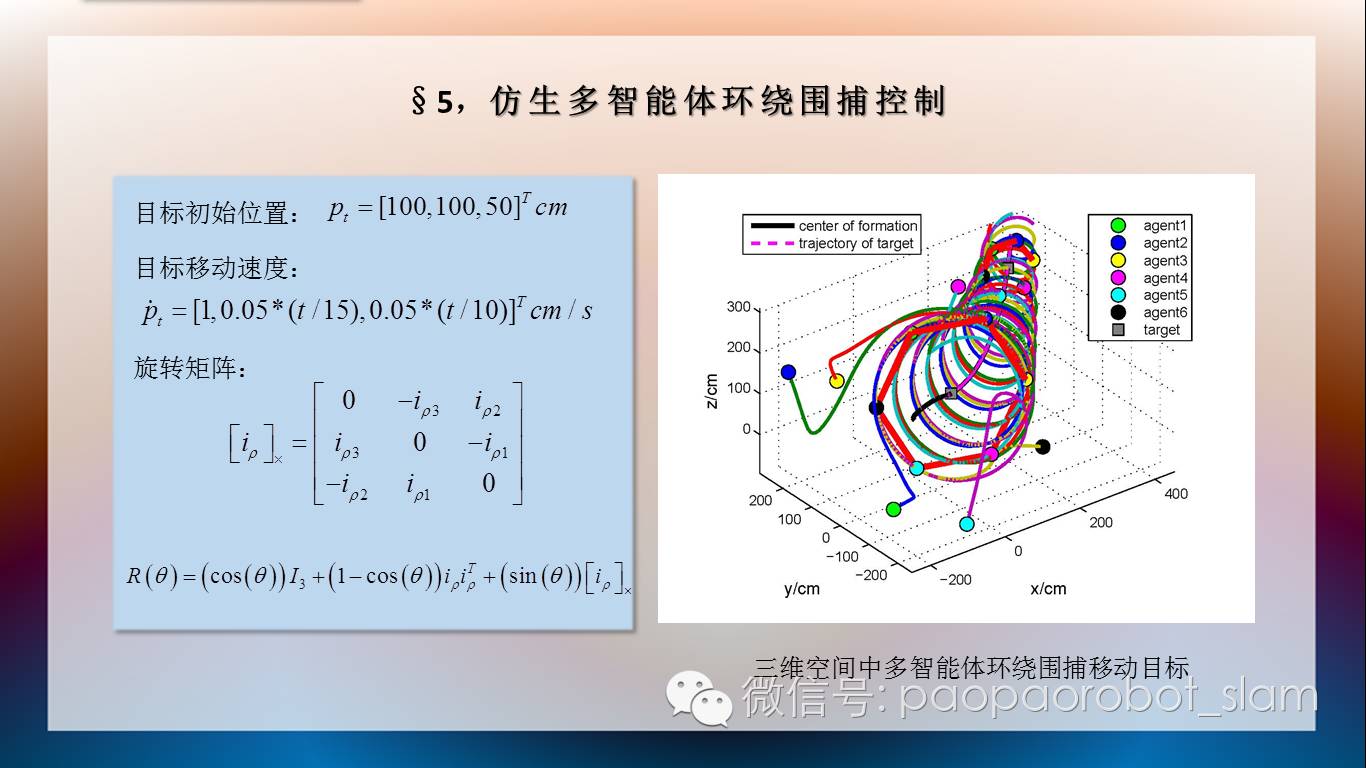
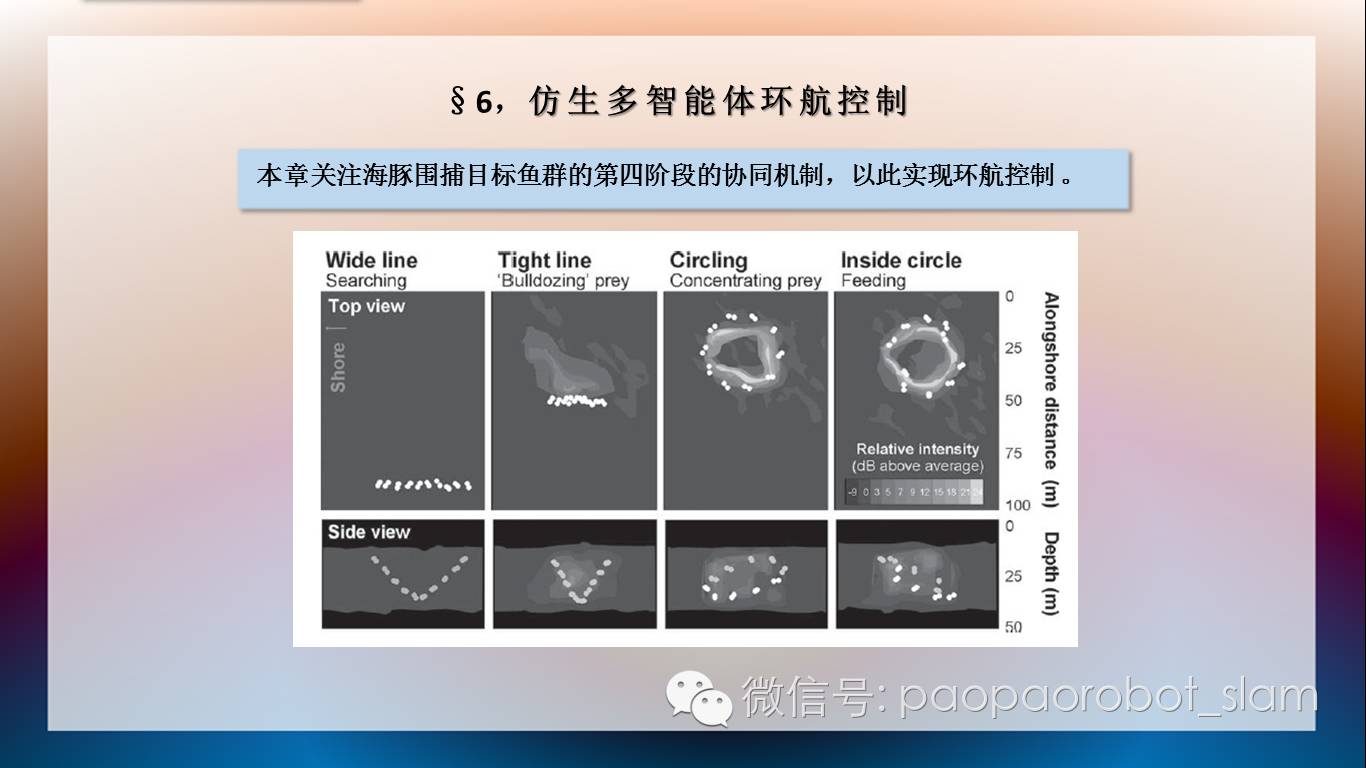
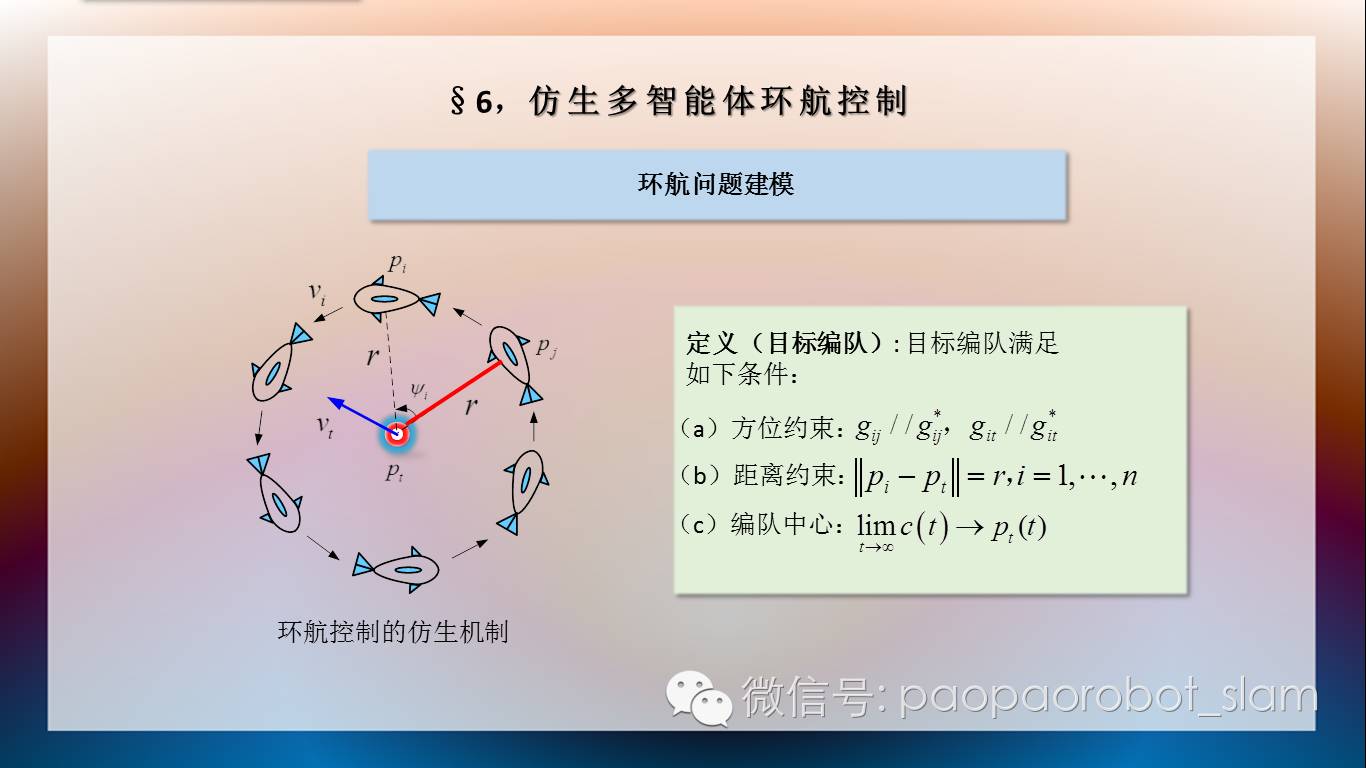
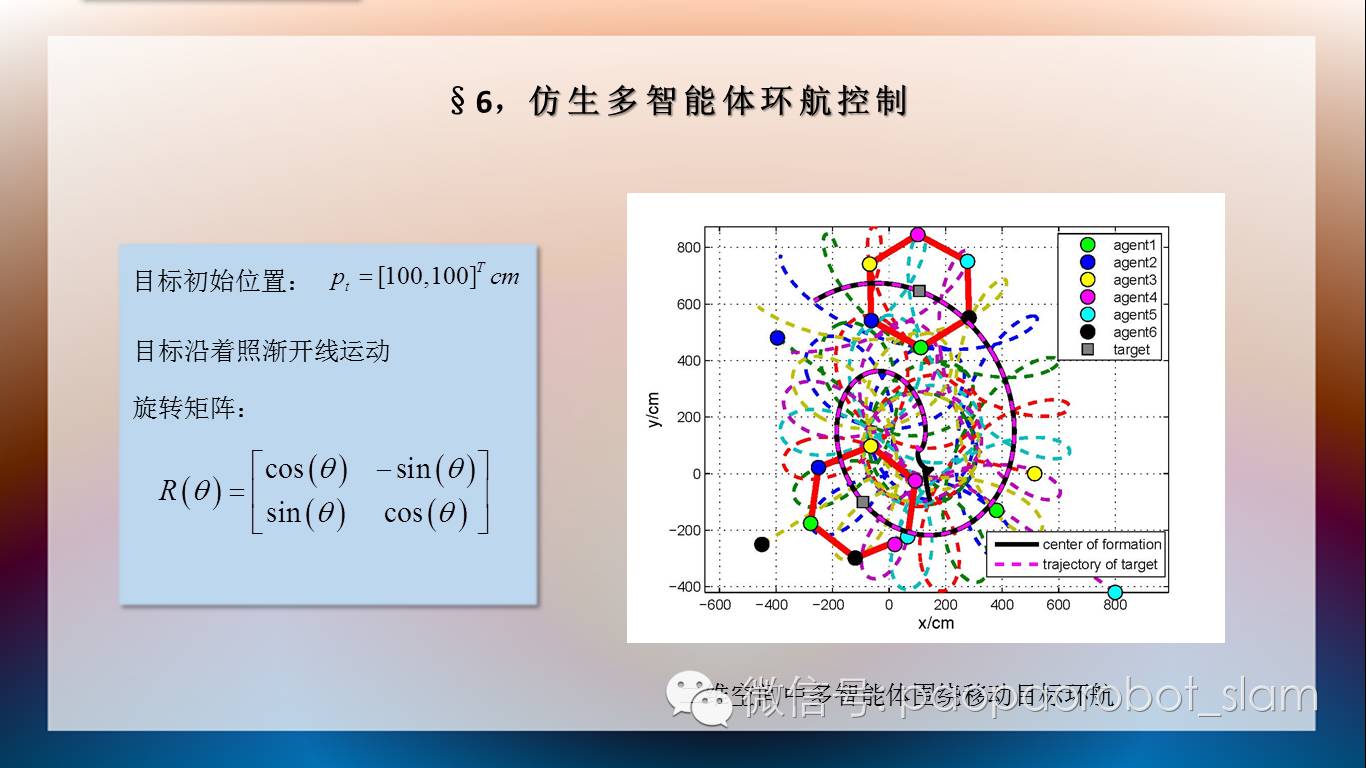
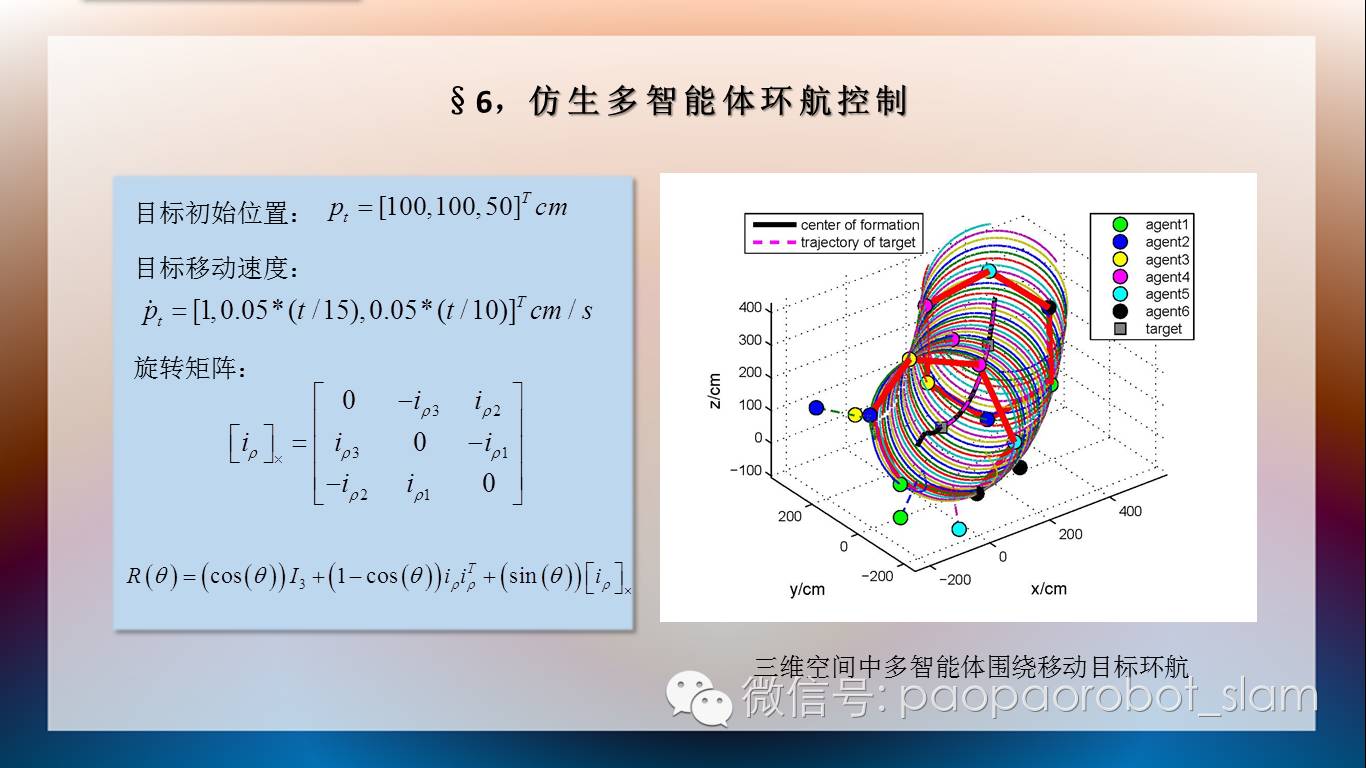
基于生物启发的多机器人协同环航和协同猎捕
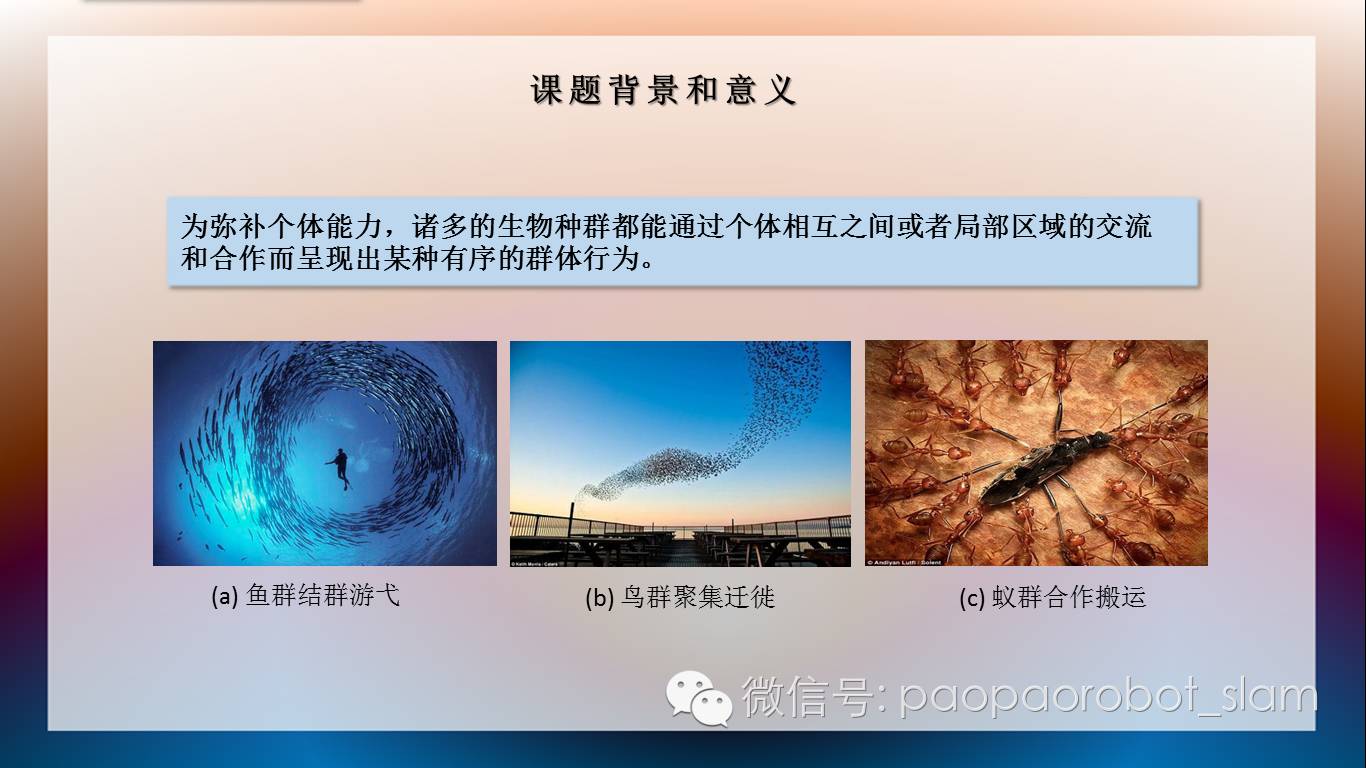
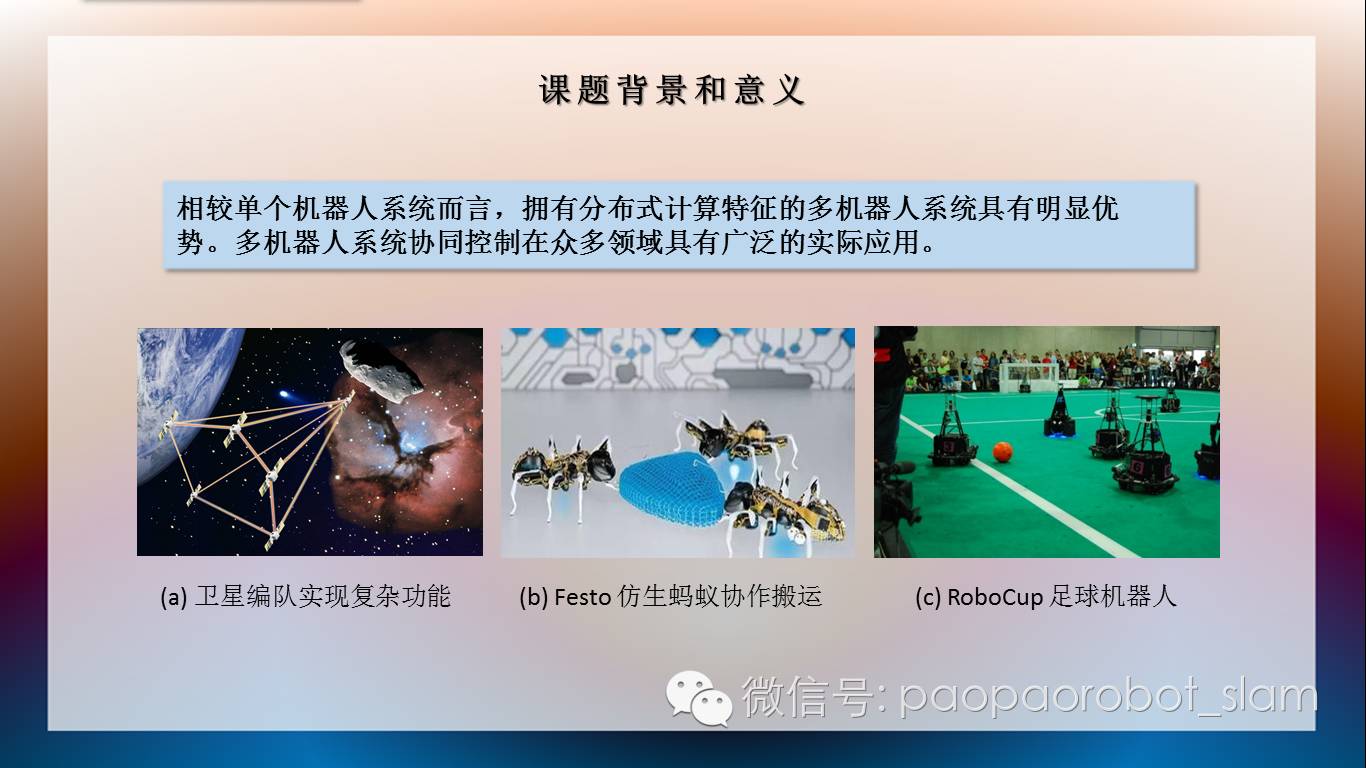
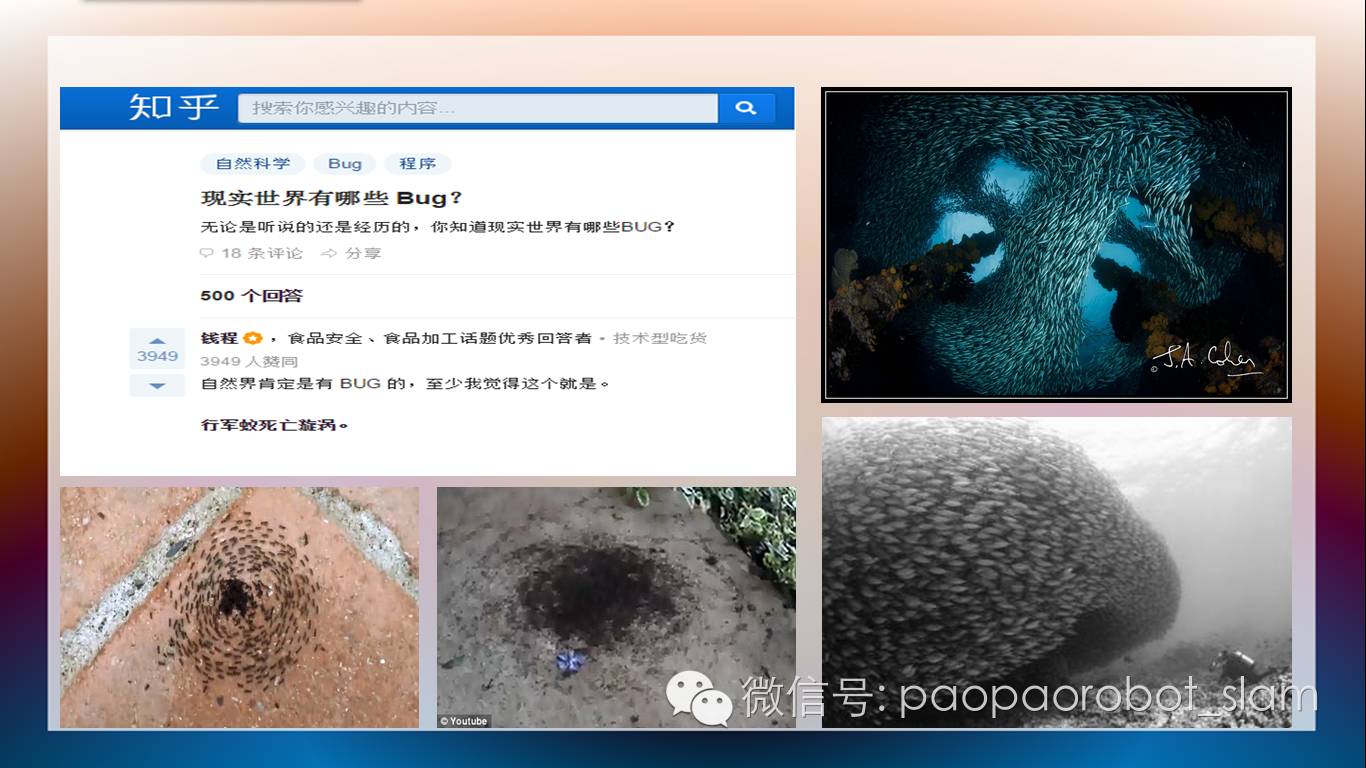
”的课程。在日常生活中和工作中,我们通常会说,众人拾材火焰高,是的,一个人的力量是有限的,团队的力量是非常巨大的。在自然界中也是如此,如蚂蚁集群合作搬运食物,鱼群围捕其他鱼类等等。而在现如今科技蓬勃发展的时代,仿生学的概念深入人心。于是,这种团队合作的思想便被运用到多机器人协作上,接下来就让
Elliot
带我们深入了解这种团队合作是怎么运用到机器人上去的。






长按下图,识别图中二维码,关注“泡泡机器人SLAM”(ID:paopaorobot_slam)公众号,回复 "20170316" 获取本节公开课的视频 + PPT。
【
节目预告
】
下一节课我们将带来“
Calibration for Mobile Robot System By 唐恒博
”,敬请期待!
【版权声明】
泡泡机器人SLAM的所有文章全部由泡泡机器人的成员花费大量心血制作而成的原创内容,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
【注】
商业转载请联系刘富强([email protected])进行授权。普通个人转载,请保留版权声明,并且在文章下方放上“泡泡机器人SLAM”微信公众账号的二维码即可。
【编辑】
王琛





