作者 CDA 数据分析师
被堵在路上是件心累又烧钱的事儿,除了让人头疼还可能错过重要的约会。据统计,美国每年因交通堵塞的直接损失达到 780 亿美元。今年,MIT 推出了深度学习公开课,试图让学生们在模拟游戏中尝试解决交通拥堵问题。
MIT 于 2017 年 1 月开设了 6.S094 课程,名为《深度学习与自动驾驶》( Deep Learning for Self-Driving Cars )
,旨在教学生们为自动驾驶搭建一个深度学习系统,授课者为 Lex Fridman。
本课程是通过建立自动驾驶汽车的应用主题,介绍深度学习及其实践。
本课程是专为机器学习初学者而设计,但该领域先进的研究人员也可以在此课的实践及应用中受益。
课程共有五节,CDA编译团队对本课程进行了翻译,目前倾情推出第一讲导论:深度学习和自动驾驶汽车。
第一讲共分为三个视频,每个视频时长 30 分钟
,来不及看视频的小伙伴,可以先看视频下方的课程内容简介。后续几节课程
CDA编译团队
将陆续汉化推出,敬请期待。
深度学习与自动驾驶第一讲(一)(中字)·MIT深度学习公开课
深度学习与自动驾驶第一讲(二)(中字)·MIT深度学习公开课
深度学习与自动驾驶第一讲(三)(中字)·MIT深度学习公开课
更多课程更新,请扫描下方二维码持续关注……
Lecture 1: Introduction to Deep Learning and Self-Driving Cars
第一讲:导论:深度学习与自动驾驶汽车
Lecture 2: Deep Reinforcement Learning for Motion Planning
第二讲:运动规划与深度强化学习
Lecture 3: Convolutional Neural Networks for End-to-End Learning of the Driving Task
第三讲:卷积神经网络与驾驶任务的端到端学习
Lecture 4: Recurrent Neural Networks for Steering through Time
第四讲:递归神经网络与汽车转向
Lecture 5: Deep Learning for Human-Centered Semi-Autonomous Vehicles
第五讲:深度学习与以人为中心的半自动汽车

Lex Fridman
麻省理工学院
AgeLab
博士后
Lex Fridman 是来自麻省理工学院 AgeLab 的博士后研究员。他在德雷克塞尔大学获得了他的学士学位、硕士学位以及博士学位,他在那里从事机器学习和数值优化技术的应用,涉及机器人技术、无线网络、主动认证和活动识别等领域。在加入MIT 之前,Fridman 博士是谷歌的客座研究员。他的研究兴趣包括机器学习、决策融合和数值优化。

DeepTraffic 与
DeepTesla
是 MIT 这门课程里面的两个重点培训内容。
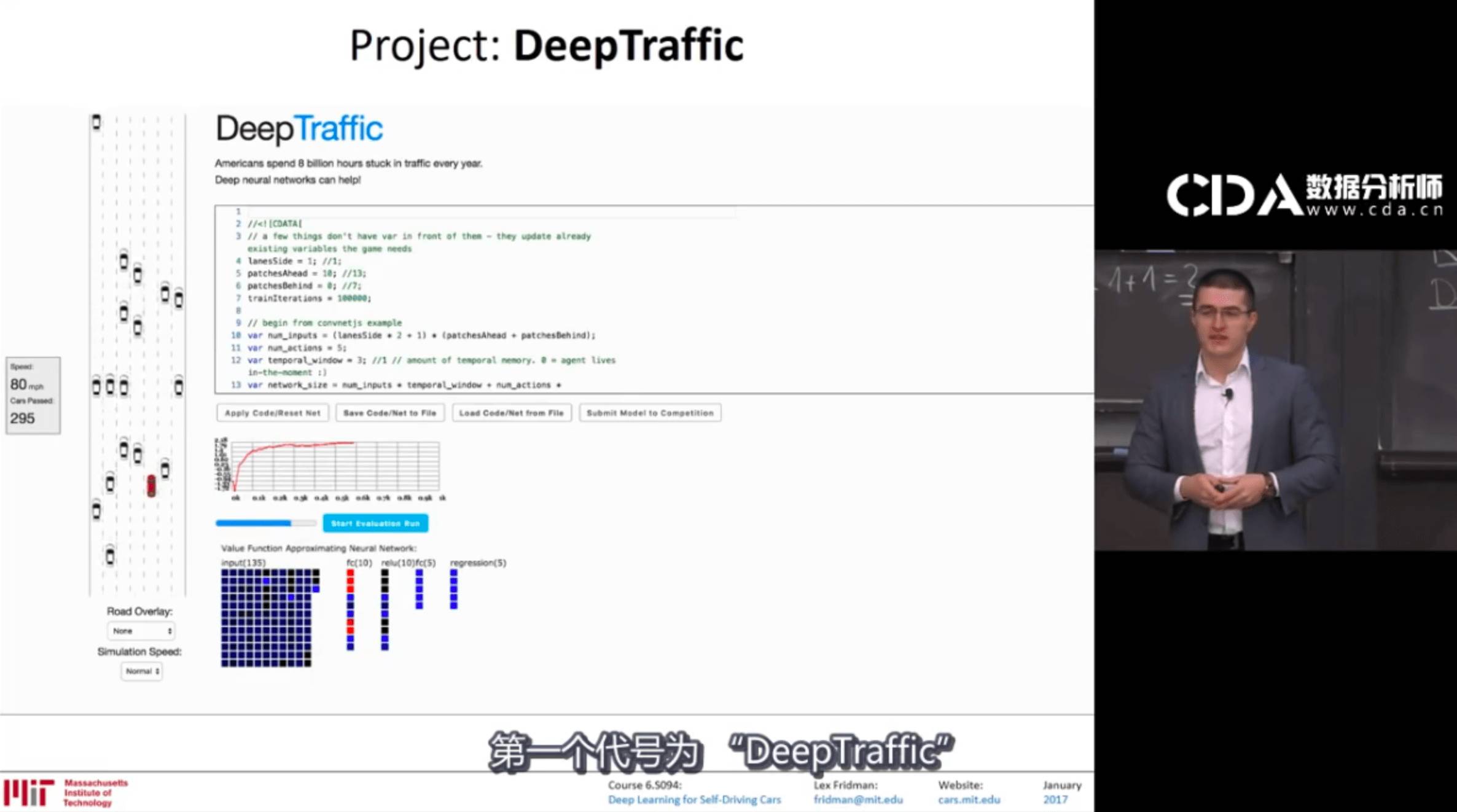
· 前者
以游戏模拟汽车在高速公路上行驶,而我们的目标就是训练一个神经网络,利用强化学习控制红车,并让它的速度尽可能快
;
· 后者
直接以端到端模型训练一个自动驾驶的起动模型
。
http://selfdrivingcars.mit.edu/deeptrafficjs/

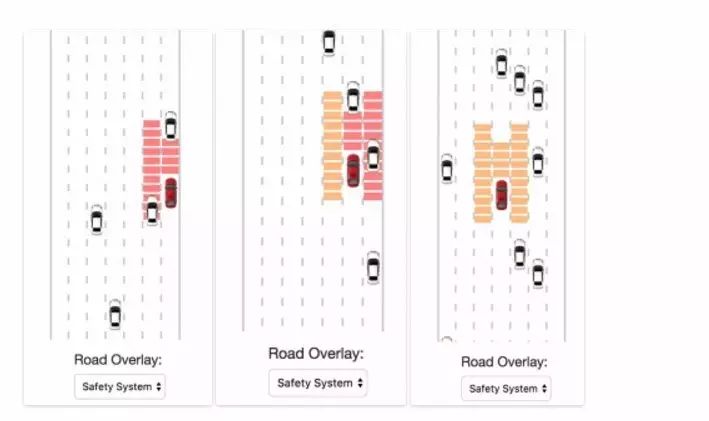
整个 DeepTraffic 游戏实际上是在网格上运行,但你也可以通过选择不同的模式,让网格呈现出来。
每辆车周围的方格表示的是它自身的速度,而橙色区域指的是该车辆可能的行驶方位。
比如在安全系统中,车辆周围会出现一个 H 型的区域,橙色表示相对安全,而红色表示周围已经有车在附近车道,此时红色小车不能越到红色区域。如果你提升了小车的速度,那么这个区域也会随之变化,毕竟如果有车挡在你的面前,为了保证安全,你一定会减缓速度(这与我们这个小游戏的目标相反)。
编程页面主要分为三块,一是实时的道路模拟情况,还能调整自己车辆的行驶速度,以提升测试速度;二是编程页面,在这里可以修改神经网络的具体代码;第三部分会显示目前神经网络的状态,还能将代码保存、重置或下载。
代码区的这几个变量可以控制网络的输入大小,更多的输入也就意味着更复杂的交通环境,也意味着需要更长的学习时间及更大的学习难度。


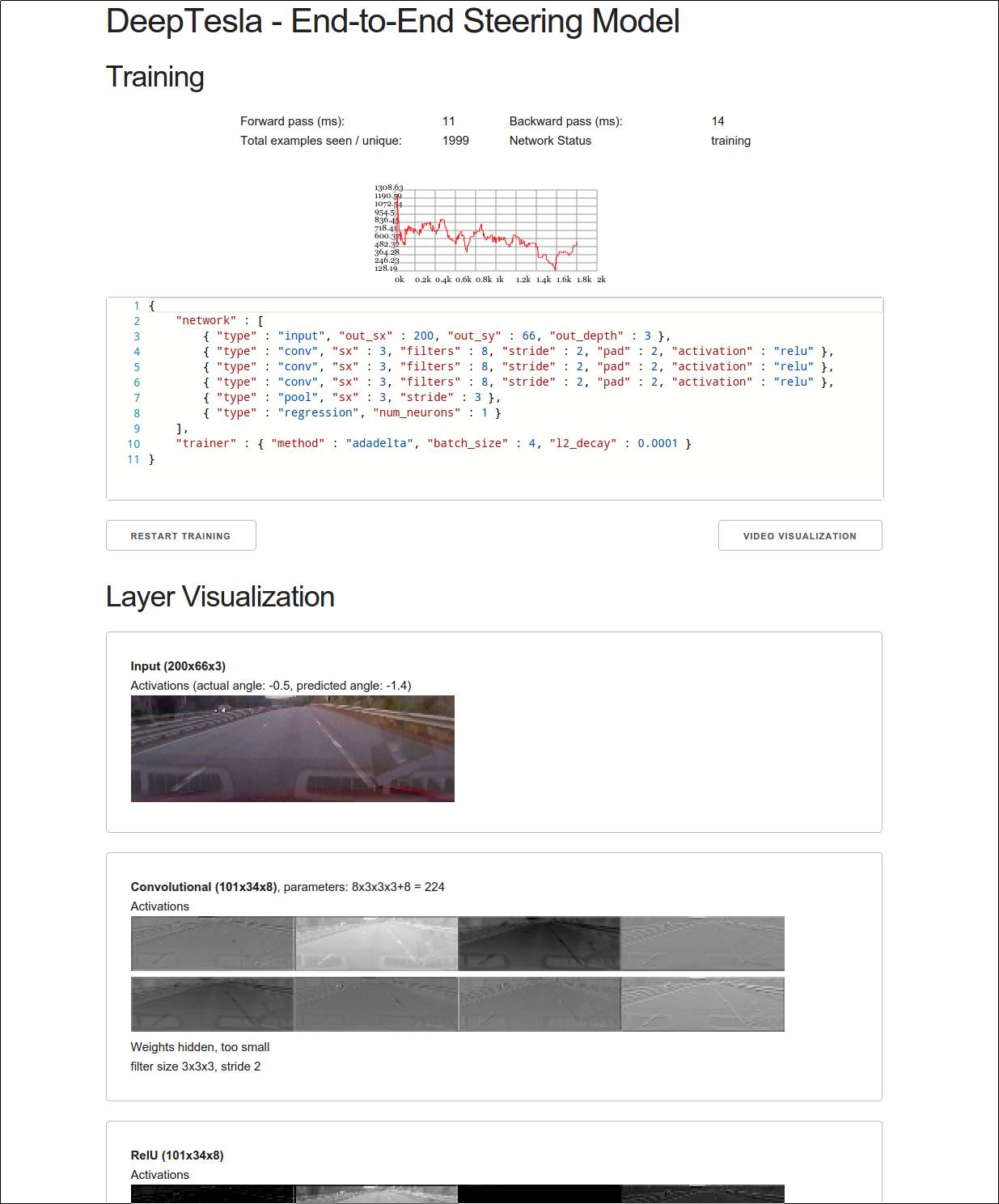
http://selfdrivingcars.mit.edu/deepteslajs/


DeepTesla 通过一个简单的演示呈现卷积神经网络的端到端转向。顶端呈现的四个指标呈现的是前向传递及后向传递所需的时间,以及目前网络已经训练的示例,还有网络的当前状态是处于训练数据还是在提取数据。

下方的图表呈现的是损失函数,正常状态下随着时间的推移,损失函数的值应该会越来越小。
编辑器下方还有一个可视化图层的功能,用户可以在网络中看到每个图层的处理情况。如果加载了特斯拉视频,随着视频内容的增加,神经网络的训练效果也会变得更好。
以上只是对 MIT 深度学习与自动驾驶课程的简单介绍,让我们抓住暑假的尾巴,来一次深度学习充电吧!