本文转载自:民航资源网
平时跟同事聊到PBN这个话题,感觉这是一个自己总在工作中遇到、却又不能全面透彻了解的概念。最近,笔者认真查阅了相关的文献和规章,把自己之前模糊的部分概念整理出来,在此写一些心得。PBN运行内涵很广,本文不能全面俱到,只是尽量把和飞行相关的内容梳理出来,如有谬误,请业内人士指点。
1.PBN RNP RNAV的关系、含义和由来;
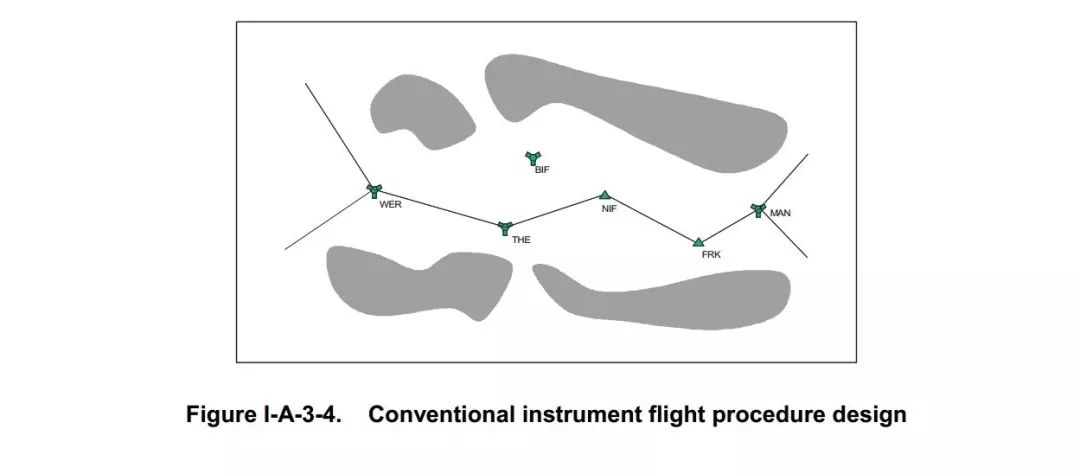
图:传统航路
最早的航线飞行中,电台(VOR、NDB等)是主要的导航依据,飞机跟着电台的信号走。可想而知,电台的设立受地形影响极大,因此相对应的航线设计和空域的使用也随之大受制约。
后来随着卫星导航(如GPS系统)的应用,人们引入了RNAV(区域导航)的概念,RNAV的一大技术突破就是利用卫星技术将经纬度坐标纳入导航点的设定。
同时RNAV本质上说,
是一种传感信号源导航
,其导航源不仅包括全球导航卫星系统,还包括传统的电台导航(如VOR/DME)。
RNAV的应用,使得空域和航线的规划脱离了地形和传统仪表导航设备的制约,如下图所示:
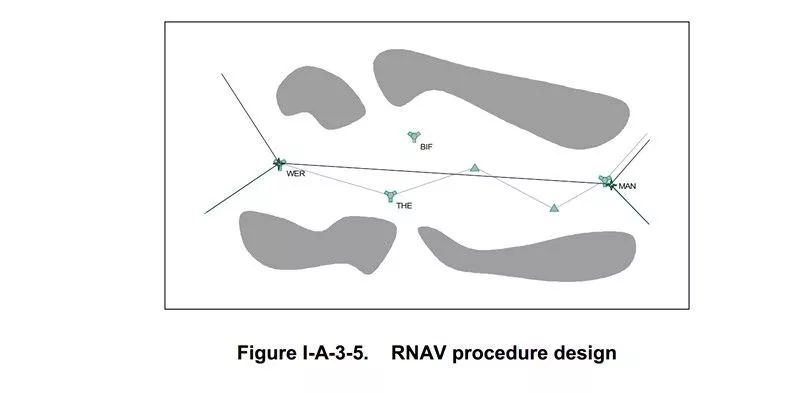
图:RNAV航路
RNP(Required Navigation Performance)
随着RNAV的应用,人们发现RNAV一个重要的技术缺陷,就是缺少机载设备导航能力的自我监督,因此在RNAV的运行中,飞机的飞行状况始终需要管制人员的雷达监控,由于很多地方雷达管制难以覆盖,为了进一步利用空域资源,人们给具备RNAV能力的飞机又添加了自我导航能力监控设备。
于是RNP(所需导航性能)的概念应运而生。
RNP的概念简单理解就是为具备RNAV导航能力的飞机提供自我导航精度监控的能力,这样做的意义就是能使飞行在雷达管制覆盖不到的地方也可以实施。
同时可想而知,RNP航路的设计上,自我监督能力的实现使得导航精度提高,航路可以规划得更窄更灵活。
但是,RNP技术的应用使得航空公司、设备商、管制单位以及民航当局之间产生了矛盾——如果航空公司愿意,他们可以凭借财力引入任何先进设备,那么管制当局改如何在现有的航线体系下来提供服务?民航当局既要考虑批准不断出现的新技术,同时也要思考新技术带来的安全隐患和其他管理成本。
因此,国际民航组织(ICAO)针对这一现象出来了相应的规章(如《ICAO-Doc9613》),来对RNAV和RNP做出相应的规范,因此,PBN(性能基导航)的概念就出现了。
PBN(Performance Based NAvigation)
基于上述提到的种种矛盾,国际民航组织在提出PBN时,是紧密结合空域设计理念的。空域的概念包含了通信、监督、管理以及导航,其中导航当仁不让是重中之重,而导航的最重要核心是PBN,
PBN最重要的就是Performance(性能)
。
那么如何描述“性能”呢?它主要有三个部分组成:Navigation
Specification(导航规范)、Navigation Application(导航应用)、Navigation
Infrastructure(导航设施)。这三个当中与飞行最相关也是最核心的就是导航规范,它实际上是对运营人实施PBN运行进行了程序、设备、人员资质等等的规定。
由于技术等原因,很多空域和机场设施依旧只有RNAV能力,而有些空域和航空器具备了PNP能力,因此PBN的范畴里,不仅包括RNAV导航规范,也包括了RNP导航规范。其基础内容如下:
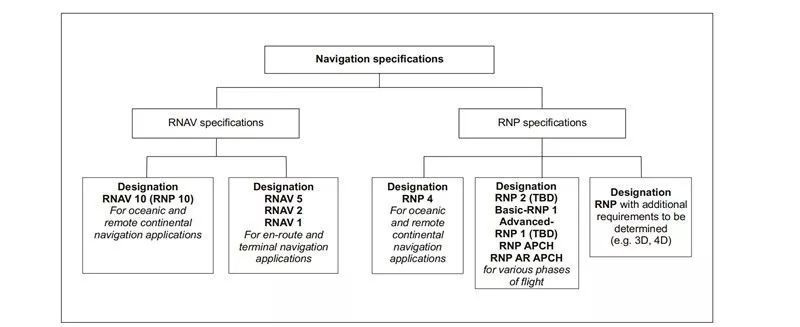
图:导航规范
在RNAV和RNP不同种类的规范中,其准精度以海里数表示,即在95%的时间内应达到的导航精度,例如RNAV
5要求在飞行的95%的时间内,导航精度达到航线左右5(nm)海里(95%概率)。常用的RNP精度值为10、5、4、2、1、0.5、0.3,甚至0.15,数值越小,精度越高。
2.机载设备的性能要求
准确性:航空器必须满足在95%的总飞行时间内,横向TSE和沿航迹误差必须不大于要求的导航精度。
完好性:有航空器导航设备故障导致TSE超过RNP值两倍,被认为是主失效情况。
连续性:如果运营人能够使用其他导航系统,并能安全地飞往适当的机场降落,则失去功能被认为次要失效情况。
性能监控和告警:飞行中当没有满足准确性要求,RNP系统提供相应警告。
3.RNAV(GNSS)、RNAV(GPS)、RNAV(RNP)有何区别?
GNSS(Global Navigation Satellite System)
GNSS是一个包含GPS、GLONAS以及GALILEO在内的卫星导航系统。美国机场的进近航图往往会标识有RNAV(GPS)进近,表示导航源来自美国GPS系统,而美国以外的进近航图都会显示GNSS,其导航原理大致类似。
例如伦敦机场的进近图中,就有标识着RNAV(GNSS)的进近图。
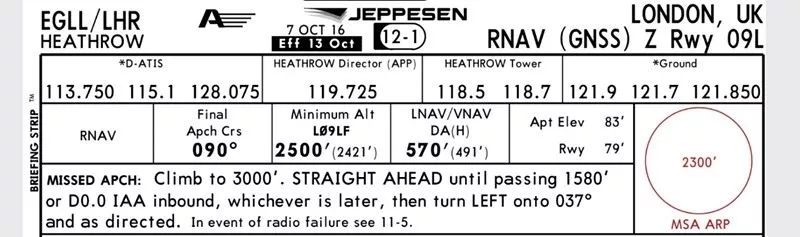
图:RNAV(GNSS)
而洛杉矶的进近图中显示RNAV(GPS)。
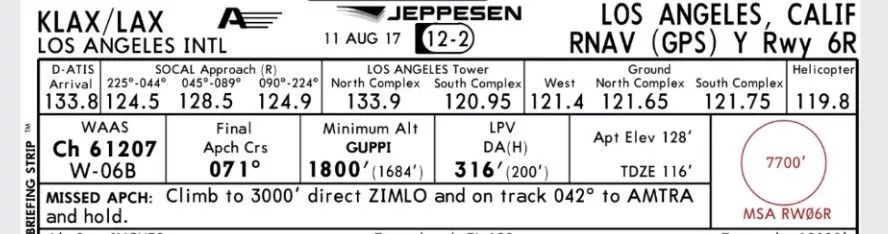
图:RNAV(GPS)
综上,我们可以把RNAV(GNSS)和RNAV(GPS)看做同类型的进近模式,他们往往要求起始进近航段和中间进近航段达到1.0nm的精度,而最后进近航段达到0.3nm的精度。
而RNAV(RNP)则要求达到更精确的0.1nm精度,并且最后进近航段可以是非直线的RF(Radius to Fix)航段,其保护区的规定也更加严格。
注意:一般RNAV(GNSS)和RNAV(GPS)指的是RNP APCH;而RNAV(RNP)指的是RNP AR。
4.什么是FRP、FRT和RF?
FRP:Fixed Radius Paths 固定半径航迹
固定半径航迹在PBN飞行中有着重要的意义,也是终端区和航路转弯航路设计的基础理念,FRP有两类,一类指终端区进近程序中特定的转弯半径RF,RF(即固定半径转弯)航段指开始并终止于定位点,有确定转弯圆心和半径的圆弧航径。RF如下图所示:
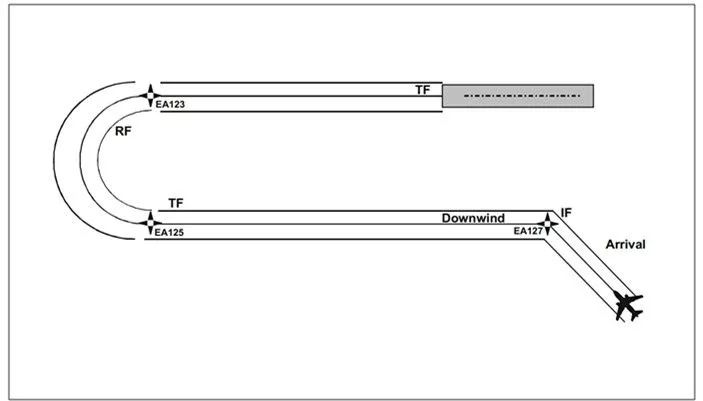
图:RF
FRP的另一种形式,指的是主要运用在航路上的转弯航路设计,由RNP系统计算飞机从一段航路过渡到另一段航路的弧形转弯路径。
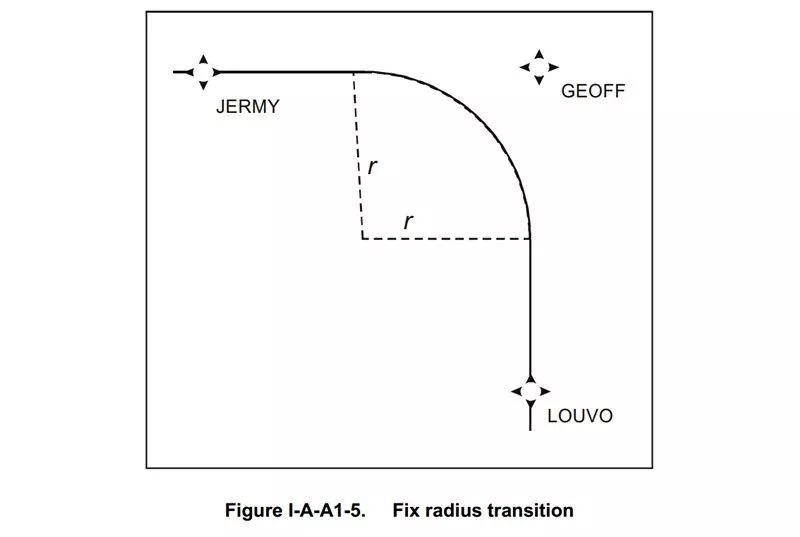
图:FRT
根据FRT设计原理我们有了预计航路,可实际飞行中,飞机的性能和外界条件各不相同,因此实际计算出来的航径和设计航径总有误差,PBN误差的概念也相应而生。
5.关于误差
PBN运行中有多种误差,笔者在此梳理一下各种误差,理解这些误差对于了解PBN运行有重要意义。
PDE航径定义误差:定义航径与要求航径之间的差别。
FTE飞行技术误差:控制飞机的精度,根据飞机指示位置与期望位置之间的差异来确定。FTE不包括操作失误所引起的误差。
NSE导航系统误差:真实位置与估计位置之间的差值,也称为位置估计误差。(PEE)
TSE总系统误差:实际位置相对于期望位置的偏差。TSE等于前三种误差的矢量和。
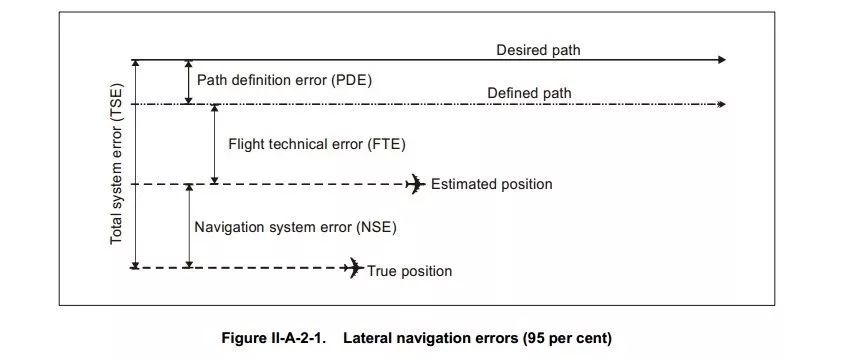
图:误差
其中,根据IACO9613文件(如下截图),TSE标准差的平方等于前三者标准差的平方和,且TSE呈高斯分布。

图:TSE
听到上述结尾的话,可能很多人会糊涂,什么是标准差?什么是高斯分布?首先,理解这些概念不难,而弄清这些概念,可以很好的帮助我们理解下一部分的内容。
6.95%从哪里来?为什么是95%?到底是时间还是概率?
首先,笔者先阐明结论:
-
当我们描述PBN性能之一准确性(accuracy)的时候,通常的表述是:要求飞机95的概率在预期航线XX海里以内;
-
而当我们描述精确度的时候,我们往往说:要求飞机在95%的时间内,达到XX海里的精确度。
标准差(Standard Deviation)是各数据与均值间差值(离差)的平方和后的方根,用σ表示。
实际飞行中,标准差可以理解为实际位置与预期位置偏离的大小程度。
而实际飞行中,飞机的机载设备会搜集大量的位置偏航信息数据(TSE),每次机器所取样本偏航数据的用x表示(样本均值),而总体飞行位置偏航数据则用希腊字母μ表示(总体均值)。
这好比飞机位置的所有数据被放在一个大篮子里,我们每隔一小段时间,就伸手把这一时间段内的部分数据抓出来测量。大篮子里的数据为全体数据,而每次抓的一把数据为样本数据,我们期望两者的均值相等。
在统计中,我们称总体均值μ为数学期望,同时当样本量足够大,抓取的次数够多,我们可以相信x=μ=0(见下图中线)。对于实际飞行而言,这条中线意味着:
我们期望飞机始终在预期的航线飞行且没有任何偏离。
然而实际飞行中,误差总会有。
因而飞机测得的实际TSE,总是在代表期望为0的直线两侧分布。人们测量误差时,很少直接说:“某点距离和均值相差多少海里”,而是会说:“某点和均值之间,相差了多少个标准差σ”








