
UUV可以搭载多种传感器、专用设备或武器装备,具有自主性、低风险性、隐蔽性、可部署性、环境适应性等特点,能够执行远程通信中继、反潜警戒、反水雷、水下侦察与监视等一系列重要军事任务,已经成为军事大国的关注焦点,竞相投入巨资研发不同类型的UUV,试图利用水下无人舰队控制未来海洋。
舰艇水下电磁场源于异种金属之间的腐蚀防腐电流、内部电气设备对外辐射以及地磁场对壳体的磁化等因素,所携带的舰艇目标特征信息丰富。通过在UUV上加装电磁场等非声传感器并联合声场,可以获取更加详实的外军舰艇目标特性信息,为水雷对抗作战以及反潜战提供技术支撑,具有重要的军事意义。
美国自1994年正式将发展UUV列入计划以来,不断发展和更新UUV在军事应用中的使命和作战特征能力,用新技术占据海底军事优势。2000年美国海军发布第一版《UUV主计划》,提出了至2030年前美国海军UUV的发展规划,明确了UUV在军事应用方面的7种使命(包括情报/监视/侦察、反水雷措施、气象学和海洋学、辅助通信和导航、UUV磁探测战、自治武器平台、后勤支援和补给)和4种作战特征能力(即海上侦察能力、水下搜索和测量能力、辅助通信导航能力和对目标跟踪及引导攻击能力)。2002年,美国海军开始强调发展自主性UUV的重要性。
2004年,美国海军提出水面与水下联合作战的新要求,强调提高UUV与潜艇、水面舰艇信息联结的能力。2015年4月,美国海军首次将REMUS 600UUV部署在“弗吉尼亚”攻击型核潜艇上,在全球战略热点地区执行水下任务,REMUS 600UUV采用拖曳式无源声呐进行广域监视,通过水下探测器进行数据采集,由卫星将采集到的数据传输至陆基站点设备进行数据处理。2015年底,美国海军“反潜战持续追踪无人艇”(ACTUV)下水,在沿海搜索敌方潜艇任务中应用,ACTUV是美国科学应用国际公司为DARPA研制的UUV,作战半径3000km,续航时间可达3个月,具有探测、跟踪、警戒、规避等功能,支持无线和卫星通信等多种通信方式,隐蔽性和浅海航行能力均较好,具有极佳的前沿部署能力及大范围反潜能力。
2016年,美国海军提出“艾森豪威尔海底高速公路网”设想,旨在“七大洋”海域的海底部署UUV及其配套的水下服务站。预计在未来美国将拥有庞大的UUV作战队伍,其角色也从“海底侦察兵”发展为“水下作战全能战士”,影响未来海战模式。
法国在2008年年末开始研制用于反水雷的无人系统,DCNS、泰利斯公司及ECA公司联合提出利用无人水面艇(USV)和UUV协同工作进行反水雷的方案,EAC集团在2016年向第一批客户提供了反水雷无人系统UMIS,与传统的猎雷系统相比,该系统操作更快、更有效、更安全,使得船员能够远离雷区。

图1 美国海军全自主UUV构想图
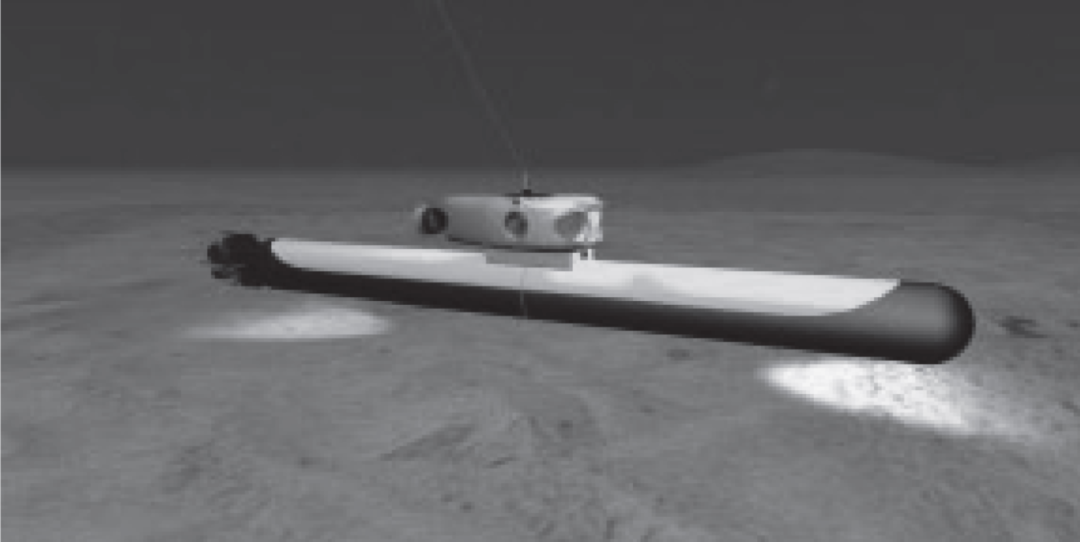
图2 DCNS公司的UUV
日本已为UUV研制投入了数亿美元的资金,其UUV技术已达到世界领先水平,研究领域涉及高性能电池、高数据率水声通信技术、低噪声和低电磁的传感器技术、控制UUV的人工智能等技术。图3和图4分别为东京大学研制的Twin-Burger2号水下机器人和PTEOROA25号水下机器人。
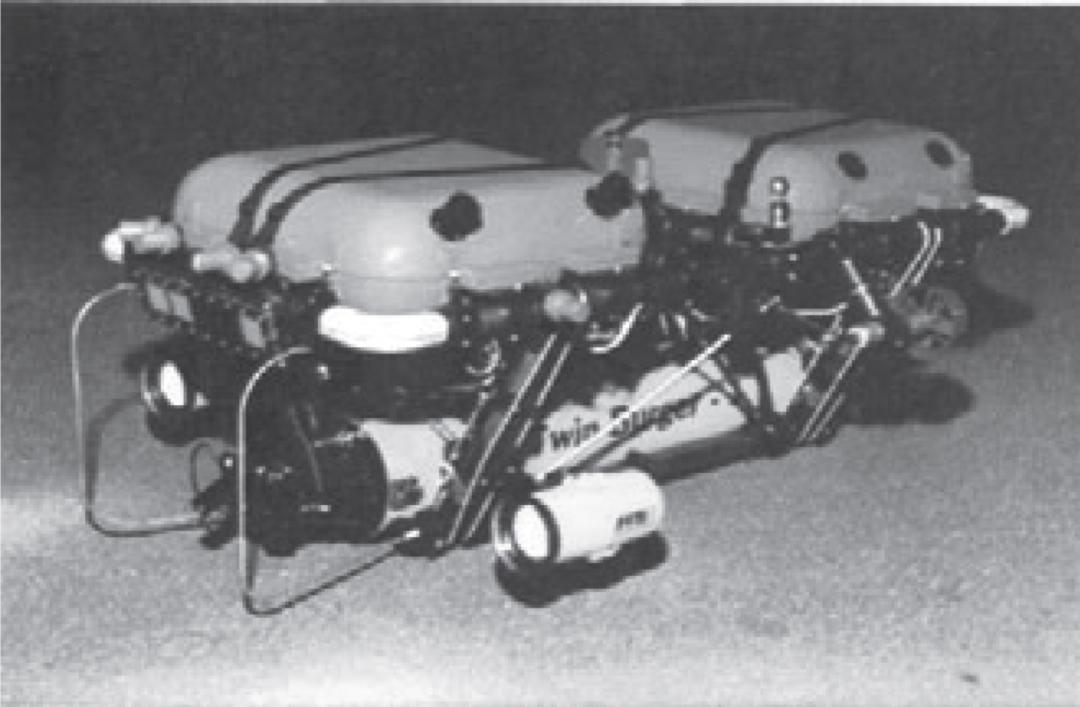
图3 东京大学的Twin-Burger 2号水下机器人
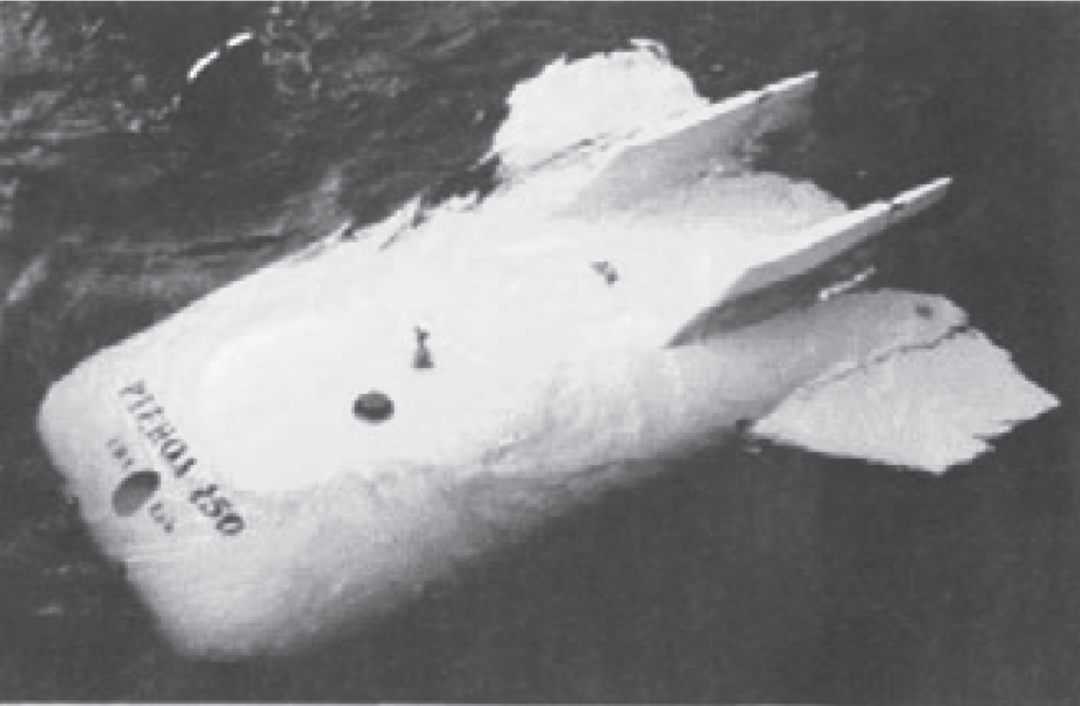
图4 日本东京大学PTEOROA25号水下机器人
国内中科院沈阳自动化所与中科院声学所等单位联合研制了“探索者”AUV(1000m),同时沈阳自动化所作为技术总体单位与多家单位合作研制了“潜龙一号”、“潜龙二号”(6000m)AUV。“潜龙”号是我国首个自主研发的AUV,其探测内容只限于声学、光学和水文测量。哈尔滨工程大学与多家单位共同开发研制的“智水”系列军用智能水下机器人代表了我国军用AUV的先进水平。
UUV电磁探测模块采用被动探测模式,即利用搭载在UUV上的水下电场、磁场传感器感知被探测目标自身的电场、磁场信号,通过异常分析和特征辨识实现对目标的探测。UUV电磁探测模块主要用于静态目标(如水下沉船、水下工作站、掩埋水雷、临时爆炸物、海底电缆等)的精确搜探阶段,即UUV通过侧扫声呐等手段完成探测区域的初始扫描后,再利用电磁探测模块对目标进行精确测量。电磁探测模块需要与其他声音、图像、化学探测等手段进行结合,通过数据融合、综合分析,可实现对静态目标的探测、定位与识别。
另外UUV电磁探测模块还可用于低速运动水下目标(如潜艇)的探测,通过感知水下运动目标螺旋桨旋转及内部电机辐射产生的低频电磁特征信号来实现对水下目标的侦察和探测。UUV电磁探测模块可用于敏感海域海洋环境电磁参数的数据采集。
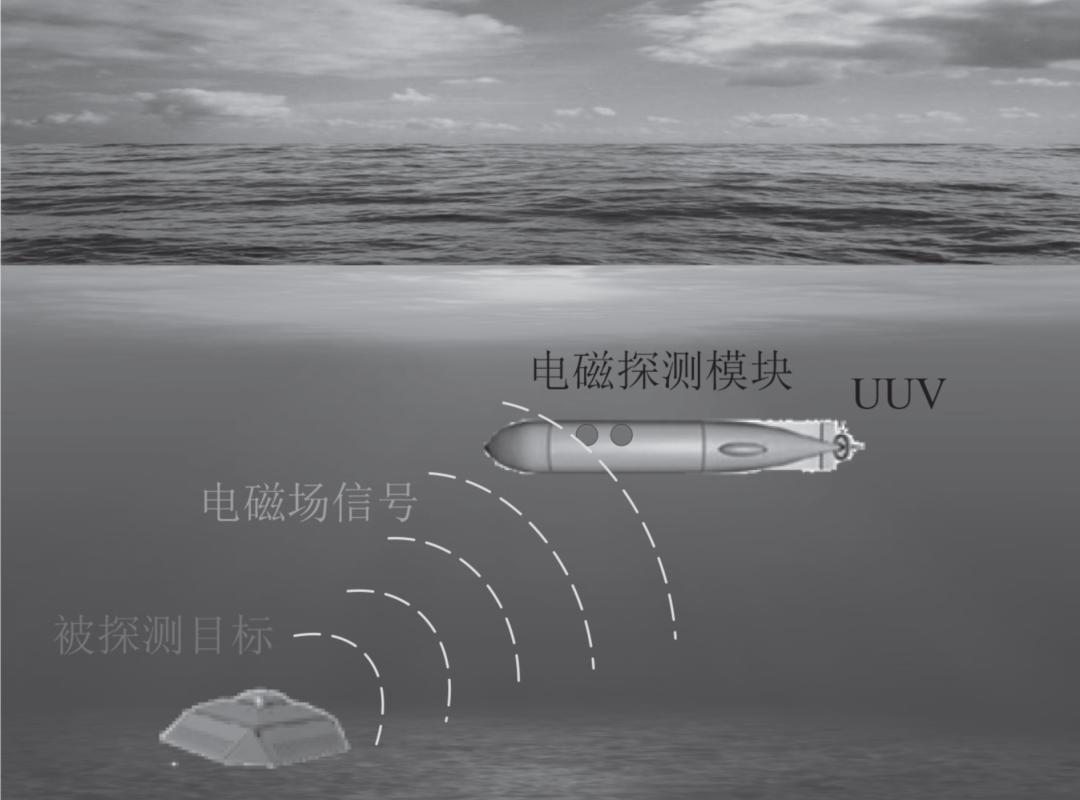
图5 UUV电磁探测模块工作示意图
国外自20世纪80年代以来,UUV技术得到很大发展,公开报道中已经在UUV上加装了高灵敏度、小型化的电磁场传感器。
美国海军研究办公室在2005年研制了UUV实时追踪梯度计(uuv-RTG),基线165mm,由4个三轴饱和式磁力计组成,主要用于探测掩埋式水雷。美国海军(USN)已经意识到有效搜寻海洋中水雷的必要性,其中的一类有机水雷(MCM)将代表未来海军的能力水平。目前对于识别或隐藏水雷设想了2步过程。首先进行初步检测或根据地图分类搜寻(SCM)的任务,这种任务执行应用到低频合成孔径声呐(SAS)。其次,再次搜寻或识别(RI)任务通过再次搜寻目标,由于近距离运用磁、声或光电传感器,能够提供或证实最终分类目标,还对相关属性进行评估,例如几何细节或磁矩的相互融合进行识别或使其分类对象明确。实现目标是为了证明或阐释经由传感器融合作用从而隐藏水雷的超强实力。具体来说,分类结果包括被动磁传感器和光电传感器的融合产生作用效果,这源自海底的短程声呐作用,3种传感器可同时在无人操纵的水下运载工具(UUV)实现控制运作。美国海军在2012年曾提出建立自动水下航行器的网络系统并且综合多种传感器对沿海进行监视。计划在无人水下航行器上安装所有可以自动巡逻大范围海域的设备,其中包括利用水下电场传感器在近海追踪安静型柴油机发电式潜艇。

图6 美国研制的基于UUV平台的磁梯度探测仪
佛罗里达大西洋大学研制的掩埋目标扫描声呐(BOSS),考虑到需要确认掩埋声呐触点,提出了1个传感器融合的概念,使用1个搭载磁传感器和海底声呐UUV在短距离获取联系。海军研究办公室(ONR)目前正在研制2个磁传感器。量子磁学实时跟踪梯度仪(RTG)是1种利用磁通技术开发的多通道张量梯度仪。现有的RTG原型已经与现有的BOSS原型集成在板载托体上,对目标进行的水下拖曳试验证明了BOSS/RTG融合概念的有效性。正在开发1种适合在相对较小的UUV上搭载运行的小型RTG版本。原子激光标量梯度仪(LSG)是一种专门为小型UUV设计的多通道标量磁传感器,它是基于塞曼效应对氦-4气体的电子自旋共振(ESR)特性的影响,与美国海军的AN/ASQ-208概念非常相似。但是通过使用激光代替非相干光进行光泵浦,LSG已经获得比AN/ASQ-208高的增加灵敏度。
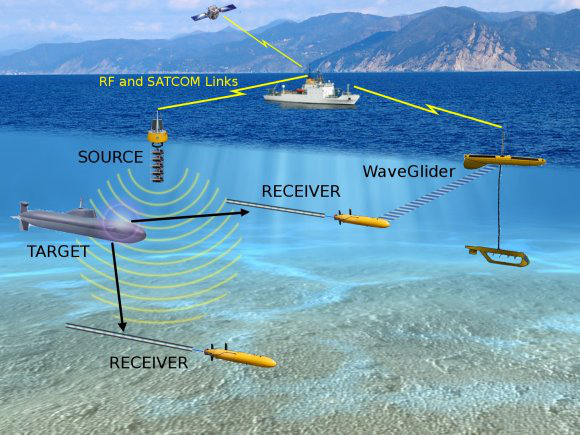
在最近完成的美国海军UUV总体规划中,情报、监视和侦察(ISR)是排名第1的未来UUV发展的能力。在太空和海军作战系统中心(SSC)的持续努力下,圣地亚哥将ISR和UUV系统的专业技术相结合,以满足这些新兴需求。讨论了执行这些任务涉及的技术和系统,强调传感器,通信和系统的自主性发展。
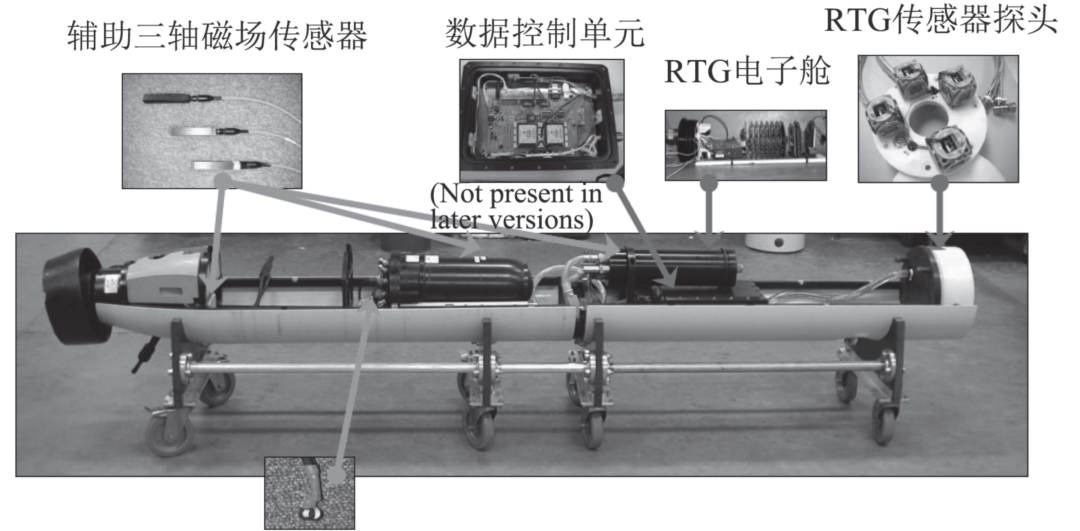
图7 UUV磁场探测模块布置示意图
加拿大皇家汉梁大学、亚洲太平洋安全研究中心以及海军太平洋舰队于2012年共同讨论了UUV在海军的重要用途,关注了一种非传统的探测设备即利用电磁场传感器探测潜艇或追踪舰船目标。
国内关于UUV上加装电磁场传感器的报道较少,也未见具体实物。海军航空工程学院针对搭载于水下无人航行器(UUV)的四面体磁梯度张量系统易受载体磁场干扰的问题,提出了一种载体磁干扰补偿方法。该方法在载体磁干扰产生机理的基础上,利用磁梯度张量差分测量算法融合四面体磁梯度张量系统中4个矢量磁力仪的载体磁干扰,建立了磁梯度张量系统载体磁干扰数学模型;然后在此数学模型的基础上提出了磁干扰补偿方法,并根据磁梯度张量9分量的数学关系提出了补偿参数辨识方法;最后通过仿真实验对方法进行验证,结果表明该补偿方法可以有效补偿磁梯度张量系统95.9%的载体磁干扰。
根据国外研究成果来看,在UUV上安装电磁场传感器可以用于搜集更加丰富的外军舰艇目标特征,将多类型传感器获取的数据进行融合,能够利用更多的信息量完成水下目标的探测识别和水下警戒等,潜在应用价值非常广泛。
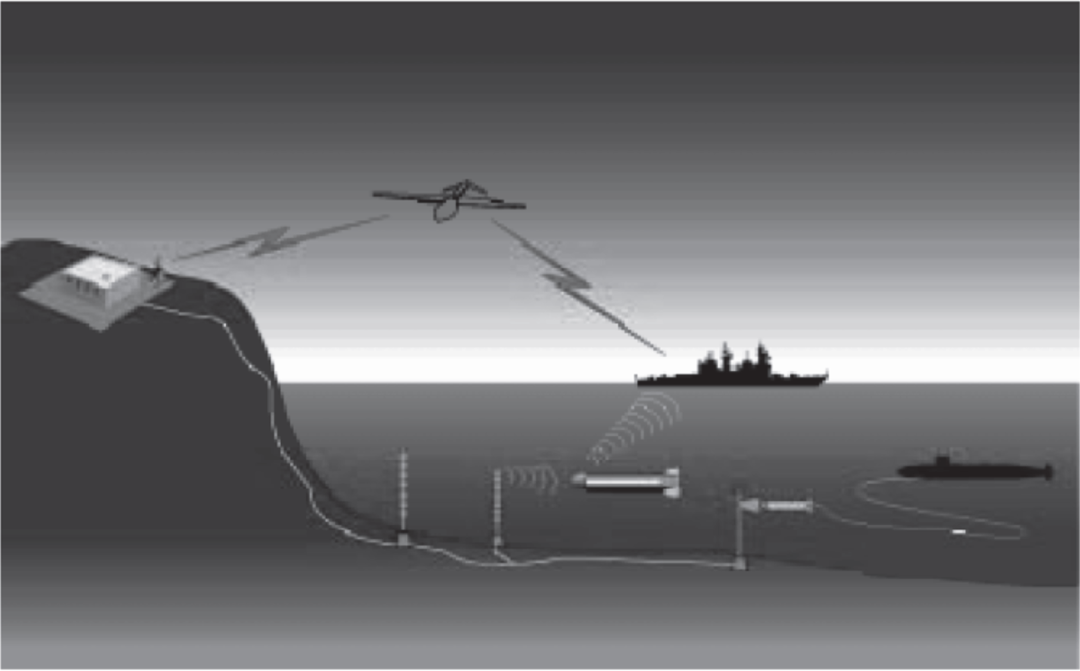
图8 UUV用于情报、监视和侦察
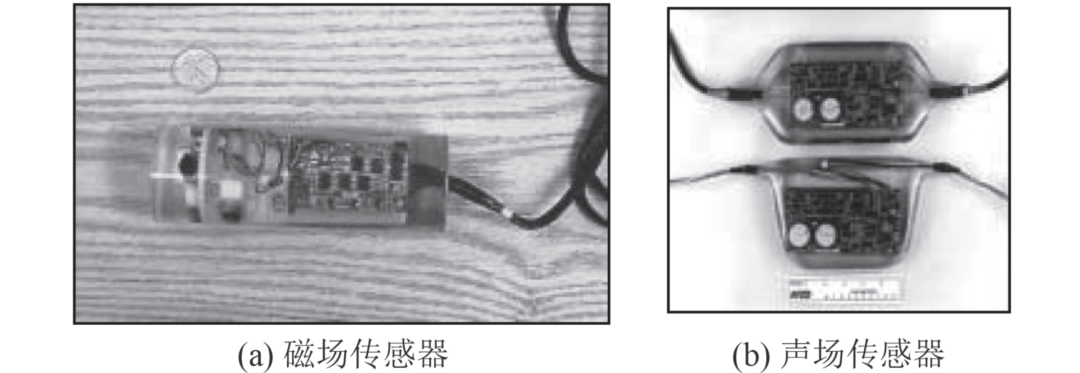
图9 UUV上安装的微型传感器
UUV作为一种别具特色的海洋力量发展势头强劲,已经具有相当的搭载能力和续航能力。通过在UUV上加装电、磁等非声传感器可以搜集外军舰艇目标的电、磁指纹信息,为我国水中兵器的设计和研制提供数据支撑。
通过将多个UUV组成最优阵列,利用水声通信,并融合被测舰艇目标的声、电、磁等不同类型的数据,可以构成一个水下监视、通信和侦察网络,实现对特定海域的水下警戒。












