简介
近期美陆军作战能力研发司令部陆军研究实验室与各科研机构合作开展了一系列新材料的研制,应用于新概念军用机器人如变形机器人、仿生移动机器人等。这些新兴军用机器人将在未来的作战行动中为士兵提供强大助力。
美陆军研究实验室的与麻省理工学院的研究人员合作,研制了一种类似于乐高结构的晶格材料,使机器人可以自行重新配置,他们希望这种材料可以实现由机器人自造机器人。
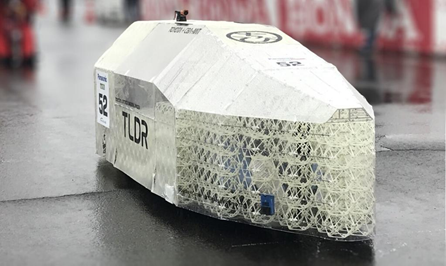
图1类似于乐高结构的晶格材料可应用于变形机器人
美陆军作战能力研发司令部(CCDC)陆军研究实验室的专家表示,就像蚂蚁连接起来搭建临时桥梁一样,未来的微型机器人集群可能也会变形组合成一座横跨河流的桥梁,在帮助士兵穿越战场后,再重新配置组合以执行另一项任务。
陆军研究实验室车辆技术局的首席科学家Bryan Glaz博士表示,某些应用程序还可能实现将机器人变形为吸收冲击/爆炸力结构的高性能机器人。
美陆军研究实验室的这项研究部分源自于于推进陆军机动性的研究成果。
科技投资中列出的一系列目标包括开发能够进行四维转换的单个系统,通过改变系统的形状、形态和功能,来协助地面作战。
这些机器人具有适应性、可重构性和灵活性,像蚂蚁一样的可重新配置以组成桥梁只是美陆军研究实验室结构机器人技术概念的一个实施案例,它模糊了主动和被动元素之间的界线。美陆军研究实验室正在寻找对地面机器人技术更广泛的应用。
美陆军研究实验室的研究人员也有兴趣利用冲击/爆炸吸收材料制造此类机器人。将乐高晶格配置与注塑制模相结合,有助于快速组装成型。而且这种机器人可不仅仅只会一种变化。
这种构造结构的方法可以赋予它们多种组合特征,例如可根据需要或响应在施加力时变厚、变硬或变软。研究人员表示,与当今机器人所使用的传统材料相比,以这种方式使用这些材料,可以将更大的结构组合在一起。
由陆军和麻省理工学院的研究人员创建的系统依赖于批量生产的模块化零件,这些零件被离散地组装以形成具有新颖特性的更大的功能性机械超材料。如图2所示。
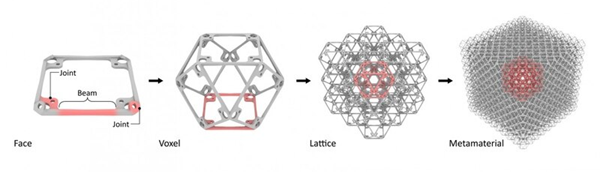
图2 模块化零件变形为超材料示意图
美陆军作战能力研发司令部的另一个项目是通过化学方法开发高级塑料,这将使单个无人机或机器人即使在飞行或行驶中也能自行变形。它不会像《终结者》电影系列中的T-1000一样拥有液态金属,而是会使用一种具有记忆功能的类似于塑料的材料来实现变形。在实验室中造出变形无人机是实现梦想的第一步。
日常生活中所看到的塑料基本上在制成零件后,就保持原有的形状和形态。而陆军研究实验室引入了一些化学反应技术,可以通过刺激来改变塑料的形状或循环利用新材料。研究人员还对材料进行编程,以记住其之前保持的形状或在接收激发指令后变形为操作员选择的新形状。未来,陆军研究实验室还将嵌入人工智能来根据多种作战需要实现智能组合和形态变换。
美陆军研究实验室目前正在研究如何制造具有自我推进能力的材料,从而使由这种材料制成的机器人无需马达或外力即可移动。这是一项跨学科研究,旨在了解生物和工程动力系统,为研究可调节的机械作用力、储能结构以及材料力的方法奠定基础,未来在美国陆军和国防部的动力和致动系统中将有广泛的应用前景。
美陆军研究实验室资助的一些大学和科研院所也取得了一些成果。马萨诸塞州大学阿默斯特分校的研究人员观察到,当长而有弹性的凝胶块由于蒸发而失去内部液体时会移动。大多数动作都很缓慢,但是每隔一段时间,它们就会加速。这些更快的运动具有不稳定性,随着液体进一步蒸发,这种不稳定性会持续发生。科学家据此发现了如何制造仅靠自身环境中的能量流动就可以自我恢复的材料。这项研究可以使未来的军用机器人能够利用自身的能源进行移动。
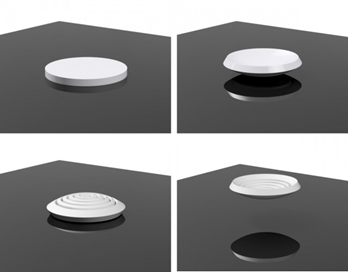
图3 马萨诸塞州大学研究人员研发的仿生移动的新材料
现实生活中,大多数装置都需要电机或借助人力才能保持运动。美陆军实验室的研究专家希望研究不需要电池或电动机来推动运动的各种应用,比如使未来的军事机器人能够仅依靠自己的能量移动。研究人员发现,许多动植物都使用像弹簧和闩锁一样的特殊部位,来帮助它们快速移动,其移动速度甚至比仅具有肌肉的动物要快得多。像维纳斯捕蝇草这样的植物就是这种运动的典范,动物界的蚱蜢和捕蝇蚂蚁也是如此。捕捉不稳定性是自然界将弹簧和闩锁结合在一起的一种方式,并且越来越多地被应用于小型机器人以及诸如橡胶弹出器之类的玩具。
马萨诸塞州大学的研究小组根据从自然界发现的基本物理原理,对不同形状的凝胶块进行试验,以找到最有可能以预期方式做出反应的形状,在没有任何马达或手动的情况下让它们反复移动。研究表明,改造后的凝胶块可以完成诸如自己爬上楼梯等动作。
这些研究说明了材料如何通过与环境的相互作用(例如通过蒸发)来产生强大的运动,这些研究对于设计新的机器人非常重要,尤其是在难以安装电动机、电池或其他能源的小尺寸机器人中。该研究小组正在与美陆军研究实验室进行合作,以将这些知识应用到未来的陆军系统中。
图4 改造后的凝胶块自己爬上楼梯