1、自感式传感器的结构
自感式传感器由线圈、铁芯和衔铁三部分组成。铁芯与衔铁由硅钢片或坡莫合金等导磁材料制成。
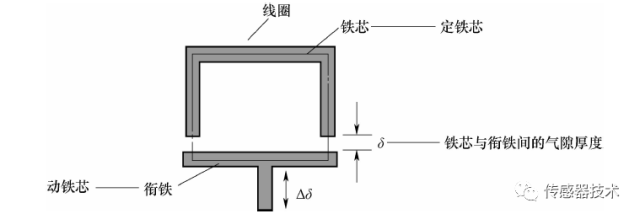
自感式传感器结构图
2、自感式传感器的工作原理
自感式传感器是把被测量变化转换成自感L的变化,通过一定的转换电路转换成电压或电流输出。
传感器在使用时,其运动部分与动铁心(衔铁)相连,当动铁芯移动时,铁芯与衔铁间的气隙厚度 δ 发生改变,引起磁路磁阻变化,导致线圈电感值发生改变,只要测量电感量的变化,就能确定动铁芯的位移量的大小和方向。
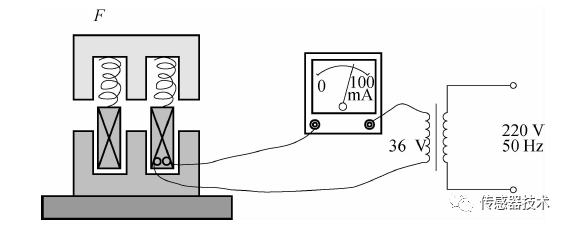
自感式传感器的工作原理示意图
当线圈匝数N为常数时,电感L仅仅是磁路中磁阻的函数,只要改变δ 或S均可导致电感变化。因此变磁阻式传感器又可分为变气隙δ厚度的传感器和变气隙面积S的传感器。
如果S保持不变,则L为 δ 的单值函数,可构成
变气隙型自感传感器
;如果保持δ 不变,使S随位移而变,则可构成
变截面型自感传感器
;如果在线圈中放入圆柱形衔铁,当衔铁上下移动时,自感量将相应变化,就构成了
螺线管型自感传感器
。
变气隙式自感传感器
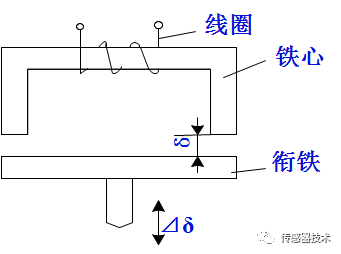
变气隙式自感传感器结构
变面积式自感传感器
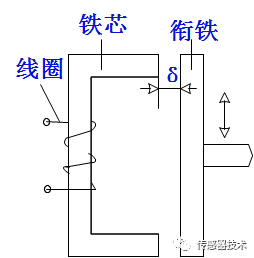
变面积式自感传感器结构
由于漏感等原因,其线性区范围较小,灵敏度也较低,因此,在工业中应用得不多。
螺管式自感传感器
传感器工作时,衔铁在线圈中伸入长度的变化将引起螺管线圈电感量的变化。
对于长螺管线圈l>>r,当衔铁工作在螺管的中部时,可以认为线圈内磁场强度是均匀的,线圈电感量L与衔铁的插入深度l大致上成正比。
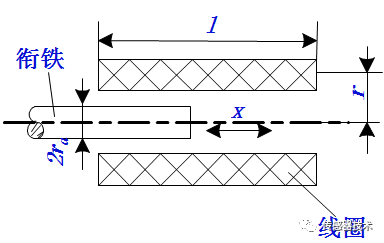
螺管型电感传感器
这种传感器结构简单,制作容易,灵敏度较低,适用于测量较大的位移量。
3、差动式自感传感器
由于线圈中通有交流励磁电流,因而衔铁始终承受电磁吸力,会引起振动和附加误差,而且非线性误差较大。外界的干扰、电源电压频率的变化、温度的变化都会使输出产生误差。
在实际使用中,常采用两个相同的传感线圈共用一个衔铁,构成差动式自感传感器,两个线圈的电气参数和几何尺寸要求完全相同。
这种结构除了可以改善线性、提高灵敏度外,对温度变化、电源频率变化等的影响也可以进行补偿,从而减少了外界影响造成的误差,可以减小测量误差。
a、差动式自感传感器的结构
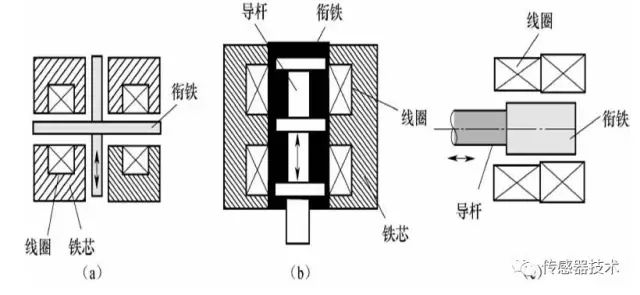
(a)变气隙式; (b)变面积式; (c)螺管式差动式自感传感器
b、差动式自感传感器的特点
差动气隙式电感传感器由两个相同的电感线圈1、2和磁路组成。
测量时,衔铁通过测杆与被测位移量相连,当被测体上下移动时,导杆带动衔铁也以相同的位移上下移动,使两个磁回路中磁阻发生大小相等,方向相反的变化,导致一个线圈的电感量增加,另一个线圈的电感量减小,形成差动形式。
自感系数特性曲线如图所示。
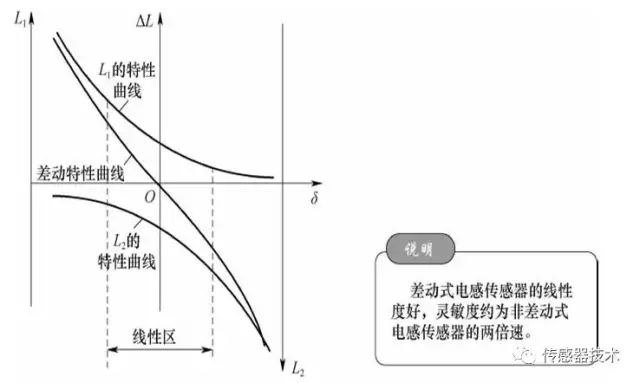
自感系数特性曲线图








