
 编者按:今年4月,零零无限发布了一款便携式无人机Hover Camera,很快一夜之间爆红,对于这款官方宣称结合了最先进的人工智能和小型飞行机器人科技的无人机,大家有期待也有质疑。半年过去了,零零无限昨日宣布将于下周一举行发布会,产品也即将发货。本文作者为零零无限产品经理,讲述了Hover Camera从早期的概念设计到量产改良的过程。
编者按:今年4月,零零无限发布了一款便携式无人机Hover Camera,很快一夜之间爆红,对于这款官方宣称结合了最先进的人工智能和小型飞行机器人科技的无人机,大家有期待也有质疑。半年过去了,零零无限昨日宣布将于下周一举行发布会,产品也即将发货。本文作者为零零无限产品经理,讲述了Hover Camera从早期的概念设计到量产改良的过程。
作为一个Hover Camera的初创团队成员。我参与了Hover Camera早期的概念设计、原型开发、数次产品迭代以及量产改良等各阶段,所以想说一下个人在这个产品开发过程中的经历以及了解的一些事情。
知乎大神众多,相信这里有无人机产品的研发工程师,也有飞行时间上千小时的老司机。但我还是想打破一下诸位对无人机的固有认知:
Hover Camera不是航拍无人机!
Hover Camera不是航拍无人机!
Hover Camera不是航拍无人机!
重要的事情说三遍。
航拍无人机是为了拍“景”,飞高飞远,拍远山,拍大桥,拍沙滩;Hover Camera是为了拍“你”。在产品设计之初,这个的“你”指的是(知乎不支持GIF,请大家自行脑补动图):
旅途中亲密时刻 :

篮球达人的扣篮瞬间:

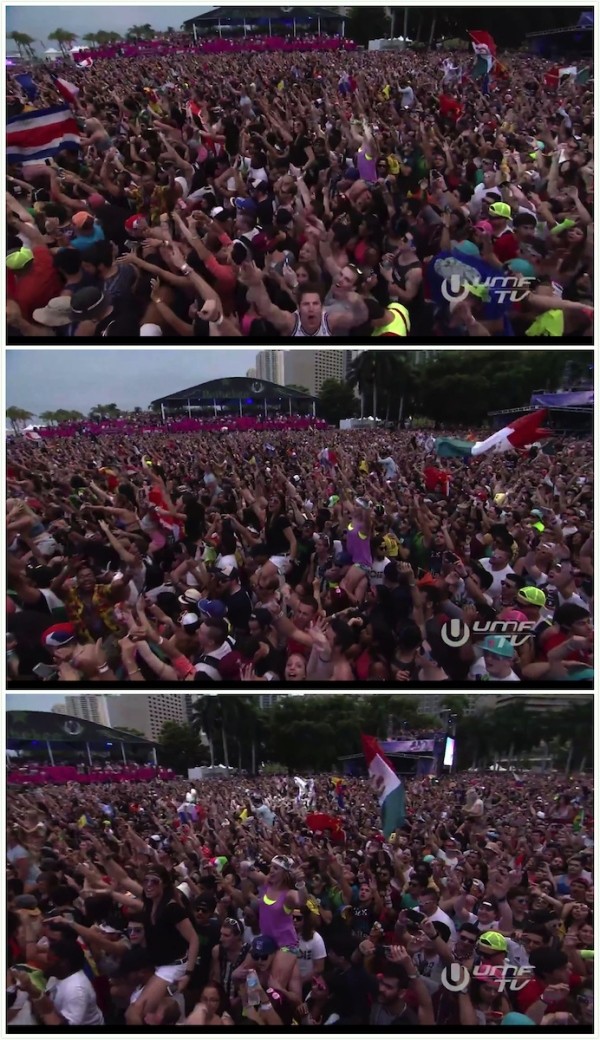
音乐节的动情时刻:
除了这些,还可以是后院的一次BBQ,可以是一次婚礼庆典,可以是一场儿童球赛,可以是周末跟家里宠物在草坪上的嬉戏。
试想一下,此类场景如果用传统航拍无人机拍摄——
为避免大家出现身体不适,此处略去一堆打着马赛克的血腥图片。
所以,让民用无人机脱离“航拍”这个单一场景,适用于更加普世的场景,从一个相对小的航拍市场,进入一个更为大众化的数码影像市场,从而惠及更多普通消费者,这是Hover Camera对行业所肩负的使命。
再多从产品经理的视角聊几句,从低频的航拍场景,到高频的日常拍摄场景,这是民用无人机产业的一次“升维”。为什么旅行类的社交很难做,为什么巨头要挤破头去争打车的场景,为什么微信能被大家称为一个未来的OS:“频次”的重要意义,适用于软件,也同样适用于硬件。
为了满足这样的使用场景,在设计之初,我们给 Hover Camera 设了很明确的三个产品目标,分别是:
安全、小巧便携和简单易用。
所谓安全,我们的标准是安全到能够跟人很“亲近”。
所谓小巧便携,是为了让它能尽可能满足用户高频的日常场景,而这些场景又动辄1~2千克的传统航拍无人机无法适用的。
所谓简单易用,做到“到手即飞“并不够,更要做到硬件和软件人机交互层的简单易用 。
接下来逐条分析一下我们是如何针对这些点做优化的。
关于安全,我们用了保护框。可能大家认为这是最“笨”的设计,但坦白讲,这也是最可靠的设计。相比利用避障等技术方案来达到“安全”,我们认为全保护的外框才是更好的选择。原因有两个:首先,物理保护更为可靠;其次,打破了小白用户对无人机产品的心理屏障,让初级用户敢于和一台无人机进行近距离的人机交互。(这点我们很快印证了:后来真实用户测试时,几乎所有女生都能很快上手)。
其实每个重要的产品决策背后都会引出大量细节实现和优化,接下来也可以给大家简单的分享一下
外形
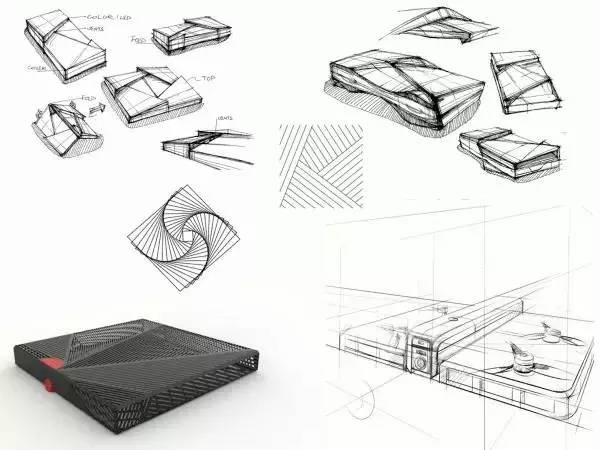
保护框的外形设计(进而影响到我们产品的整体造型),我们前后做了好几轮的脑暴,直接上设计稿。
材料
早期原型机设计时,我们就考虑了多种材料选择方面的可能性。
铝镁合金——密度大,太重,冲击后会产生塑性变形。
塑料或加纤塑料——注塑的材料刚度不够,需要采用更宽更厚的结构梁设计才能满足稳定支撑电机旋翼装配的要求,另外过软的细梁也会给用户抓取的安全性造成负面影响。
我们最终的选项落在了碳纤维板——重量轻,强度高,符合我们的设计和品质需求。决定使用碳纤维板之后,摆在面前的另一个大难题就是加工工艺。因为最后我们的制成需要历经CNC切割,抛光,烤漆等25道工艺,特别是要在一整块1 mm厚的碳板上切出最窄处梁宽仅1 mm的网格纹理,前人是没有尝试过的,我们也是经历了多次的工艺改良和迭代,才最终稳定的实现了量产。
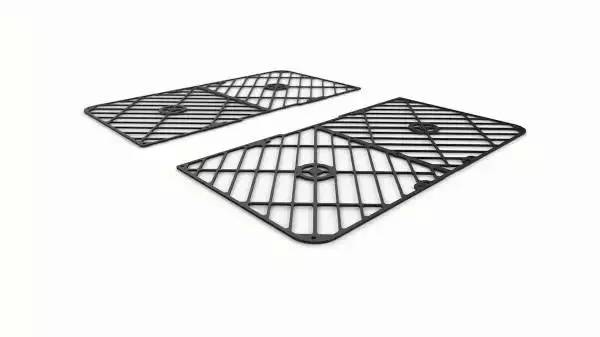
最终的碳纤维板成品
另外,提到保护框,还得必须谈一下我们对碳板镂空的优化。
了解空气动力学的同学都知道,Hover Camera这样的全保护设计对整个动力系统所提供的最大升力和工作效率都有损耗,为了得出最佳的碳纤维板镂空比例和镂空形状,我们专门自制开发了动力系统测试平台,不同的动力系统和镂空设计组合做了系统的实验对比,同时结合大量的用户抓握测试,最终定下目前上下碳板镂空率为80-85%的设计,使得整个外框能够方便用户抓取,有效的保护用户的同时,仍然有足够的镂空空间供旋翼上下方气流通过,使其产生足够多的升力。
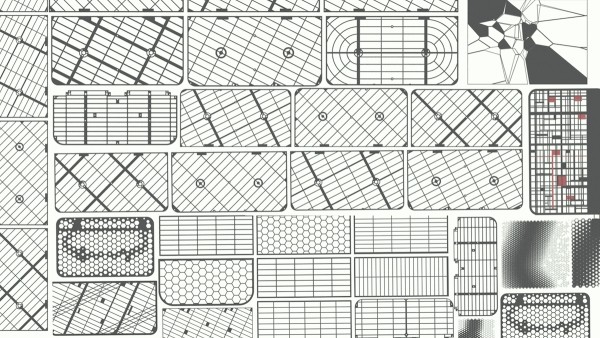
镂空结构的部分设计稿
为了尽可能延长续航,我们还对电机(马达)和旋翼都做了深度定制。
从电机的选型设计和仿真,到实物打样验证和优化改进,从桨叶剖面翼型的选择,到弦长扭转角分布以及桨尖形状的优化,一共搭配组合做了数十版的迭代。在相同的旋翼尺寸和结构约束条件下,我们的动力系统在业界内是处于领先地位的。
当然,也希望各位知乎上气动方面的大神给我们多提建议,随时交流 。
再说句题外话,我们的产品4月底亮相后,有看到报道拿我们产品的续航和一些中型航拍无人机做对比,其实是不合适的。因为,我们不是航拍无人机。
并且从空气动力学原理上来讲,普遍来说更大尺寸的旋翼(比如8-9寸桨)的动力系统的力效确实要好于小尺寸旋翼的动力系统(Hover Camera的旋翼尺寸在3寸左右),续航也会更长,这个应该不难理解。在我们的产品设计和设定使用场景下,我们有意识地选择了小尺寸的设计做出了全保护,在便携和续航之间取了个平衡。
当然,我们也在通过多种方式去提升续航,目前更多的是通过电池的性能质量,电机控制算法和整机硬件减重去实现。
即将面世的产品会有10分钟的续航,配2块电池。
还是那句话,Hover Camera不是航拍无人机,所以跟中型航拍无人机比没有任何意义。至于我们的续航(10分钟 )在我们的目标场景下能否满足大部分需求,暂且按下不表,后面详细说。
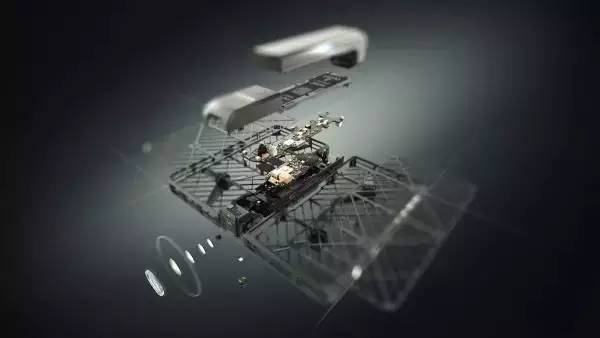
有句俗话说,麻雀虽小,五脏俱全。大家知道,进化出“五脏俱全”的麻雀,大自然大约是花了1.5亿年。类似的,要把一台无人机做小,同时做到“五脏俱全”,这在工程上是一个前所未有的挑战,也是需要大量时间和人力去打磨的。
为了实现产品的小巧,我们首先设计了一个可折叠结构。这个设计想法来自于一次团队脑暴时偶然激发的灵感。因为当时我们一直在逼自己思考:如何能做出一个理想中足够小、足够便携的产品。
当时考虑的问题有很多,因为如果整机尺寸太小,那抗风性几乎为零,于是想到了折叠。我们考虑过各种折叠的方式,但突然的一下灵光闪现,让我们想到,Hover Camera 外形是不是可以像书本一样,随身携带,随处使用。这和我们产品的定位构思非常吻合,后来方案立刻通过,然后就进入了具体结构设计的细化。所以才有了现在实现的折叠方案,一气呵成的翻折动作,1秒钟完成打开放飞和回收闭合,非常方便。有一个细节就是,机身的两处磁铁设计,展开时不用费力;闭合时同样有磁铁作为吸合锁扣,简单易用手感也好。
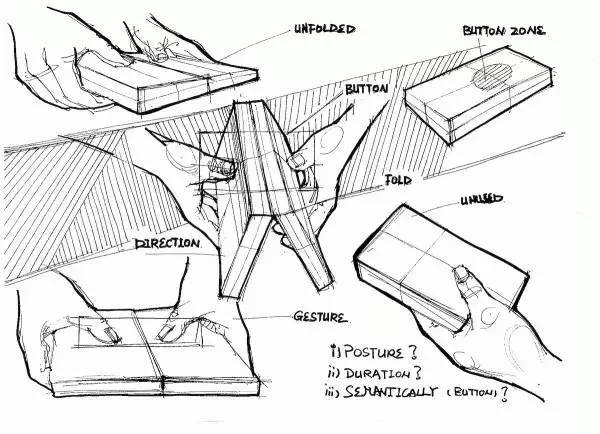
展开Hover Camera的设计手绘
结构问题解决了,然后就是外框的厚度了。为了进一步减薄Hover Camera的全保护外框轮廓,使其更轻盈便携,我们量身定制了电机旋翼组装,采用将螺旋桨盖扣在无刷电机的外转子上的设计,去除了普通电机上原本需要的凸轴,电机旋翼的组装高度仅为电机本身的高度。整个两翼部分展开厚度连同保护外框仅16 mm。
整机的小型化要求我们的硬件电路板也做到尽可能小巧。基于高通骁龙芯片的主体电路器件被排布在71 x 29.2 mm2大小的10层电路板上,懂行的硬件电路设计师朋友们应该知道,像我们这样将包含高通套片的硬件芯片部件组合方案压缩布局在宽度30 mm 以内的做法,其实是一件很有挑战的事,排布走线和器件散热都是前期评估时的很大的风险。
曾经一度有供应商提出做不了,需要改成更宽的电路板风险更小,但因为我们对设计的坚持不妥协,最终还是把这个难题给克服了。

这是我们的主板和硬币的对比图
散热系统上,我们也把“小巧”推到了极致。我们原先使用的是带风扇的散热设计,后来创新性地使用了无风扇设计,上一张对比图。右侧是带风扇的散热设计,可以看到很明显的突起(红圈中)。

为了能够实现无风扇的设计,我们利用了旋翼绕流增加空气对流,对主体电路器件施加无附加风扇的主动散热。我们的工程师对Hover Camera的流场进行了充分的数值仿真和流动显示实验验证,最终制定出目前的这一套效果非常不错的散热结构方案。
另外, 去除内置风扇结构之后,不仅让整体结构上更加一体化,还减少了机身重量,从而进一步延长了Hover Camera的续航。









