【AI WORLD 2017世界人工智能大会倒计时
29
天
】
大会早鸟票已经售罄,现正式进入全额票阶段。
还记得去年一票难求的AI WORLD 2016盛况吗?今年,百度副总裁、AI技术平台体系总负责人王海峰、微软全球资深副总裁,微软亚洲互联网工程院院长王永东等产业领袖已经确认出席大会并发表演讲。谷歌、亚马逊、BAT、讯飞、京东和华为等企业重量级嘉宾也已确认出席。
本届大会特设
智能医疗论坛
,并邀请到来自谷歌、卡内基梅隆大学、康奈尔大学等多位相关领域的专家和创业者,就“医疗 AI 在哪些方面已经或即将超越人类医生”、“独立的AI医疗系统何时能够出现”等问题进行展望、分享。智能医疗的真实发展现状如何?技术瓶颈何在?未来最有潜力的应用是哪些?请来世界人工智能大会智能医疗论坛寻求答案。
更多大会日程陆续揭晓中……
参加大会,请关注新智元微信公众号或访问活动行页面:http://www.huodongxing.com/event/2405852054900?td=4231978320026了解更多
来源:arxiv.org
编译:刘小芹
【新智元导读】
斯坦福大学计算机视觉实验室李飞飞团队的最新研究提出一个新的机器人学习框架:神经任务编程(NTP),在机械臂的物品堆叠、分拣和桌面清理三类任务中,证明该框架具有强大的泛化到未知任务的能力。李飞飞表示这虽然是探索性的进步,但这是一个非常吸引人的课题。
论文下载:https://arxiv.org/pdf/1710.01813.pdf
GitHub地址:https://github.com/StanfordVL/ntp

摘要
在这项研究中,我们提出一种新型机器人学习框架,称为神经任务编程(Neural Task Programming,NTP),它将从演示到神经程序推导(neural program induction)的 few-shot learning 想法结合起来。NTP将一个任务规范(例如,一个任务的视频演示)作为输入,并递归地将其分解为更精细的子任务规范。这些规范被馈入一个分层的神经程序,其中底层程序是可以与环境交互的可调用子程序。我们在三个机器人操作任务中验证了我们的方法。NTP在具有分层结构和组合结构的序列任务中实现了强大的泛化(generalization)能力。实验结果表明,NTP通过不断增加的长度,可变拓扑和变化的目标学习很好地拓展到未知任务。
在复杂的操作任务中,例如物体分类、装配和清理,需要在机器人和环境之间的长时间交互中进行连续的决策。在复杂的任务中进行规划以及适应新的任务目标和初始条件,是机器人技术的一个长期挑战。
让我们试想一个在仓库环境中的物体分类任务——它需要分类、从仓库中检索,最后打包装运。每个任务都是一组基本的分层的序列,例如 pick_up、move_to 和 drop_into,它们可以被组合成操纵子任务,例如抓起和放下(grasping and placing)。这个问题有很大的变化空间:仓库中的不同物体位图、子任务的排列、不同长度的任务列表等等,这就导致形成一个很大的任务空间。
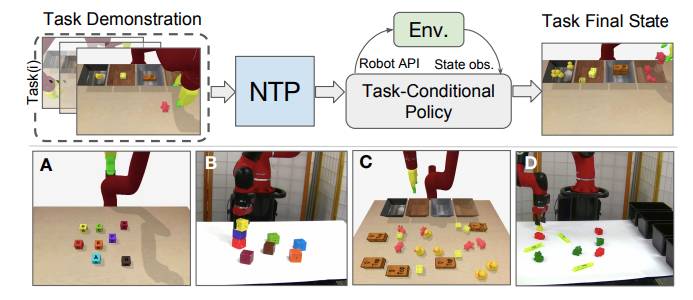
图1:(上)在测试时,NTP实例化一个任务条件策略(一个神经程序),通过解释演示任务执行指定任务。(下)我们分别在模拟环境和实际环境中的方块堆叠(A,B),物体分类(C,D)和桌面清理(图8)任务评估NTP。
举个例子,图1中,(C)显示了一个物体分类任务的简化设置。任务是将4个类别的物体移到到4个箱子里。在各类别和容器之间总共有256种可能的映射,并且对象实例的可变数目进一步增加了复杂性。









