加入雷锋网,分享AI时代的信息红利,与智能未来同行。听说牛人都
点了这里
。
雷锋网注:本文作者冯玉坤,常锋无人机CMO,专注行业无人机。雷锋网独家发布。
农业发展到今天,已经比较成熟完善,不论是在我国北方还是南方,基本上都能达到全机械化作业,生产效率比以往大幅提高。而这三年无人机在植保领域快速发展,由一开始的手动半自动飞行到现在的全自助精准飞行,植保无人机越来越成熟智能,也越来越“亲民”。
不久前在一个农业展看到一款大型拖拉机,其可以做到无人驾驶去耕地(犁地)作业,采用的是误差精度达厘米级的RTK系统,作业的效果比有人驾驶的拖拉机更好,也让农民劳作变得更加轻松。

不过,木桶原理告诉我们,有所长必有所短,农业生产效率的大幅提升并不是靠加长最长的那块木板,而是靠加长最短的那一块木板来实现。
在农村待过的人都知道,农业从播种到收获的整个过程中,机械化使用率最高的两个节点正是农业播种时和收获时:播种有高效播种的拖拉机,收获有快速收获的拖拉机。开头和结尾效率都很高,却唯独在农作物需要健康生长的这个过程中效率变得很低,需要投入大量的人力而不是机械去作业。而最突出的一方面就是植保。

目前农业植保最主要的作业方式是人工喷药和拖拉机喷药。拖拉机喷药确实比人工喷药的效率高,但其在使用过程中存在减产、劳动力投入大等问题,使得植保作业依旧是整个农业生产过程里最短的一块。但如果把一个拖拉机由地面作业变为空中作业,或许就能解决这些问题?
一、为什么要将拖拉机飞起来?
把笨重的拖拉机飞起来,这个想法或许很荒诞,但历史告诉我们,很多伟大的发明都是源自于一开始看似荒诞的想法。任何先进事物产生的动力都是源自于想迫切改变一种现状的渴望。
当农民渴望不再用牛来耕地时,出现了超大马力的拖拉机;当农民渴望不再用镰刀收割时,出现了高效率的收割机;我们将拖拉机飞起来去做植保的动力也是源于迫切改变当下植保方式及现状的愿望。那么到底是什么样的现状才让我们产生这么急切的改变心态呢?
1、农民植保太辛苦
去过新疆的人可能见过当地农民是怎样对棉花喷药的。在新疆阿克苏棉花地用拖拉机喷药,一般也要5个人配合才能完成整个喷药过程。其中一个人开拖拉机,其他四个人在田地里拖着皮管喷药。拖拉机缓慢往前开,人缓慢往前走,每碰到一个障碍物(比如:树木、电线杆等),需要停下来重新插管子,再插上去再喷,一整天都是重复这样的事情,干这个事情实在是太辛苦了。

同时,常用的植保方式还有很大的安全隐患。除了带上口罩,穿上塑料雨衣,除此之外几乎是没有任何的防护的,迎面而来的全是农药。一天下来,农民可以说是在农药里泡了一整天,由此而引发的农药中毒事件也屡见不鲜。
2、农村劳动力日渐减少
经济的持续增长使得工业部门不断吸纳农村劳动力,越来越多的农村子弟背井离乡,拼命奋斗,只为摆脱面朝黄土背朝天的命运,比上一辈人过得更好。
新一代的人,没有吃过老一辈人那样的苦,也不愿意自己再重复父辈们的那种生活。传统低效的农业生产也正面临着后继无人的尴尬。

“空心村”越来越多,劳动力越来越少,在未来相当长的一段时间里这样的困境将依然存在。提高作业工具的效率以及改善作业的方式,是目前整个农业发展进程中的亟待解决的问题。
3、规模化种植日渐普遍
当前农村空心化趋势越来越严峻,规模化种植的条件逐渐成熟。国家提出土地流转政策,开始大力推动传统农业向现代农业转型,农业规模化生产将是其必经之路,传统的植保作业方式也将逐渐被新的方式替代。
让拖拉机从地面飞到天空,像无人机那样自主精准飞行完成喷药,这样不仅可以解放农村劳动力,也可大幅度提高作业效率,进行高效安全作业。
二、如何将拖拉机飞起来?
让一个物体能够飞起来,需要满足的因素很多,面临的困难也很多。在设计上要符合空气动力学,在飞控系统开发里需要强大的算法,在选择动力源方面也需要考虑多种方案。
1、让拖拉机飞起来所面临的几个问题:
问题1:怎么设计?
问题2:动力系统怎么选择?
问题3:飞控系统怎么做?
问题4:要具备哪些功能?
······
2、目前市场有没有可借鉴的案例?
当前现状是,农业植保最主要的作业方式是人工喷药和拖拉机喷药。在消费级领域,电动多旋翼无人机异常火爆,其通过挂载相机等设备来做一些特殊应用。
电动无人机可以被用来改造成会飞的拖拉机吗?现实是目前电动多旋翼采用的锂电池发展遇到瓶颈,在短期内无法突破,一个普遍载重在10KG,飞行时间15分钟左右的产品,根本就不适合大规模植保作业。
3、历史上有没有油动多旋翼成功案例?
看完当前,看历史。在历史的发展过程中,不缺脑洞大开者,也不缺有荒诞想法者。
据历史记载,多旋翼无人机是一种能够垂直起降的无人直升机,其发展历史最早可以追溯到1907年,当时Breguet兄弟在法国科学家CharlesRichet的指导下,设计制造了世界上第一架有人驾驶的多旋翼飞机—“旋翼机一号”。驾驶员通过控制油门来对其进行控制。但是由于当时的技术限制,他们无法实现飞机的完全控制。
旋翼机一号
直到20世纪50年代,美国陆军研制的VZ-7,被称做Flying Jeep,外表看起来像极了简易版拖拉机,其有效载荷250KG,靠425马力涡轮发动机驱动,容易起飞,有效地提高了功率与重量比。虽然它相对稳定,但是它未能达到军方对高度和速度的要求,最终被迫放弃。

Flying Jeep
由此可见,让拖拉机实现在天空植保作业的想法是可行的。油动直驱多旋翼的方式是可以借鉴的。
4、形成让拖拉机飞起来的思路
鉴于突破锂电池的瓶颈还需时日,目前只采用电动
多旋翼多轴的布局方式,利用发动机来提供动力,并通过飞控控制发动机油门的大小来控制转速进而控制飞行姿态。
5、设计油动直驱多旋翼——会飞的拖拉机
顺着这个思路,我们开始着手设计油动直驱多旋翼——会飞的拖拉机。由于油动多旋翼不像电动多旋翼那样,有完整的理论体系,它在很多地方的技术是空白的,这就得需要我们自己去摸索。
1)关于机身的设计
机身主要由机架和起落架部分构成。
机架是整个飞机的骨架,用于支撑、安装无人机的各个组件。我们机身主体采用碳纤维等多种复合材料,各连接件采用高品质航空铝合金,整体采用三角桁架式连接,机架结构重量轻,强度高。
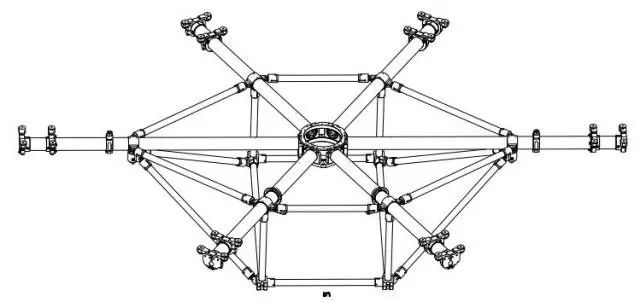
机架
这样设计的因素有很多。一方面,要考虑机架质量要轻;另一方面,要考虑机架的整体刚度要大。
最开始设计时采用的不是碳纤维材料,而是选择铝合金。但后期发现选用铝合金材料会出现很多问题,比如操作失误炸机后,铝管在接头处会开裂;装配时发现铝管外径误差范围较大,给装配带来很大的不便,降低了生产效率等。
起落架的设计也必须慎之又慎。因为起落架不仅用以支撑整个机体,还要在飞机着陆时消耗和吸收飞机与地面产生的冲击,保护机体结构不受损坏。
而滑撬式结构、高性能氮气弹簧减震、有最佳的缓冲角度,能够让拖拉机变得非常皮实。
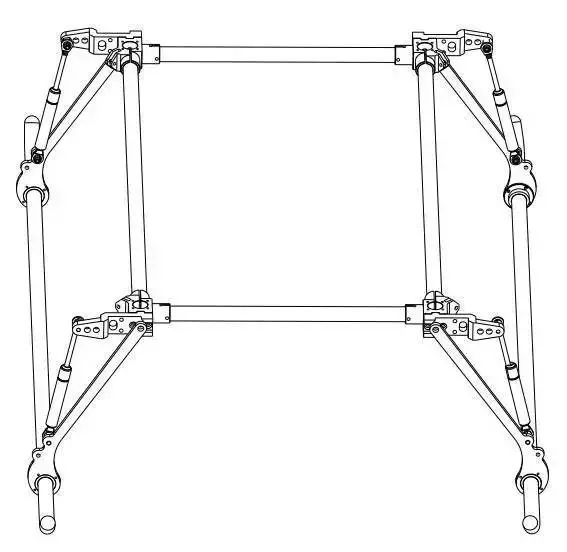
起落架
2)关于发动机
油动多旋翼,其心脏便是发动机。把国内相对来说不错的几家发动机应用在油动多旋翼上测试,结果达不到我们要求的标准。最终在保证性能的基础上我们硬是将其重量减小了1公斤,将结构设计得更适合装配在我们的机架上。
国内航模发动机寿命是硬伤,国产发动机的寿命是200~300小时,我们改进后的发动机经测试也是200~300小时。面对这个结果,我们最终决定与国外的发动机厂家进行技术合作,让发动机的寿命达到了1000小时以上。
解决了发动机寿命的问题后,另一个问题就是这款油动多旋翼对环境的适应性差。目前的航模发动机都带有化油器,常见的是机械式的,普遍对环境的适应性很差。举个例子,今天上午在深圳龙岗区测试飞行各项指标正常,下午拉到深圳宝安,各项指标就会变得不一样。出现这种问题怎么办?常用的做法就是
重新调节发动机的高低速油针,调到能够适应环境、各项指标重新回到最佳状态下。

发动机
当一款产品对环境适应性差,那么大范围的应用将会面临很多问题。用户希望产品是买来就能用,在哪儿飞都没问题。那有没有这种解决方案呢?方法可以借鉴摩托车的化油器改为电喷技术,将其应用在多旋翼发动机上,而且最终测试后发现这样改进后发动机比以前更省油。
3)关于电启动
玩过固定翼的都知道,一般固定翼的航模发动机是没有电启动的,需要靠手去拨桨来启动发动机。这在固定翼上来说勉强可以,但是在油动多旋翼上却是非常危险且累人。
在开发电启动工程中,从启动电机的选择到齿轮的加工,每一个环节的要求至少达到:单个电启动重量不得超过800g,启动寿命次数在1万次以上。
4)关于飞控
如果说发动机是心脏,那飞控系统就是油动多旋翼的大脑,对各种传感器的数据进行处理。造出一架合格的油动多旋翼无人机(会飞的拖拉机),客户需要的不是花里胡哨的app,而是你的整个系统要足够稳定,稳定决定一切。而稳定又是靠传感器决定的,传感器不准怎么办?当然是靠滤波算法。
加速度计、陀螺仪等传感器的数据,在现实中,是很“脏”的,也就是说被各种噪声污染得很厉害,要从大量噪声中过滤出真实的传感器数据,这就在姿态测算里涉及到滤波。与电动无人机相比下,采用发动机做动力输出的油动多旋翼震动大,更是增加了滤波算法的难度。
农民最在乎的是作业效果以及降低生产成本。农民对植保的要求最首要是效果要好能杀虫增产保收,不能重喷、漏喷,其次是节省农药降低成本。这个要求看似很简单但却不容易做到,需要做到精准飞行以及精准喷洒。
常规的GPS系统的精度都是米级,根本不能够达到植保的要求。我们最终研发了RTK系统,作业精度达到5CM以内。当所有的功能都实现后,可增加一键起飞、全自主作业功能,让油动多旋翼(会飞的拖拉机)更具智慧。
5)关于云智能管理
近一年,大家都在谈论大数据、云管理。加入云智能管理功能,客户在使用油动多旋翼(会飞的拖拉机)时产生的大量数据会进行云储存。通过对大数据的分析,后期也能为用户提供更好的生产解决方案。
三、拖拉机飞起来后植保效果如何?

在新疆石河子农八师棉花地做实战演练
在维持4个多月实地测试的过程中出现了一些小bug,一个是由于新疆气候干旱,沙尘较大,飞机起飞时卷起沙尘,导致沙尘被吸进风门,造成发动机寿命缩短。
我们的空气滤芯采用的是市面上已有钢网结构类的,在深圳测试过程中从来没出过这方面的问题,结果到新疆测试时发现,这种滤芯根本应付不了新疆的恶劣环境,导致过滤不充分。
回来后我们就开始疯狂地测试,将国内上百种空气过滤方案一一实验,最终找到一种过滤性能极佳的方案,将沙尘颗粒物牢牢地挡在滤芯外层,并且同时做到对透气性产生很微小的影响。

超强防尘性能测试
下面是我们在新疆用无人机给农八师一四七团的棉花打脱叶剂时的测试数据,具体设置的飞行参数如下:
单次带载药量:40升
飞行高度:4米
飞行速度:5米/秒
作业喷幅:4米
喷头最大流量:1.1升/分钟(单个喷头)
每亩地喷药量:1.5升/亩
作业测试后得到的三个主要喷洒数据如下:
平均起降准备时间:4分钟
单次喷洒亩数:24.6亩
实际一天喷洒棉花脱叶剂:1119.5亩
为什么我们最先的测试选择在新疆给棉花打脱叶剂呢?原来,在新疆植保作业里,对无人机载重最有挑战的就是棉花脱叶剂的喷洒。
一款载重10KG电动的植保无人机喷洒棉花脱叶剂,飞行时间不超过5分钟就没药了需要下来加药,一天最多能打不超过300亩的脱叶剂。地面拖拉机打药一天最多不超过500亩地,同时拖拉机不精准的作业,造成大量农药的浪费。一番测试对比下来,无疑让我们看到了三年来努力成果的意义所在。
四、总结
如何让拖拉机飞起来去做植保?这个问题也许在三年前觉得难于登天。现在,作为直接用户的农户也许依然对油动多旋翼这个专业名称不了解,但若能让农户实际体验到大载重长航时满足植保作业需求的油动直驱多旋翼的优势,无疑会为农业机械化发展再次锦上添花。

常锋油动多旋翼“天马-1”(一款会飞的拖拉机)