多功能假肢神经控制与人机交互技术能够实现灵活、自然的假肢操控,为截肢者恢复肢体功能提供有效帮助。中国科学院深圳先进技术研究院李光林博士团队依托中国科学院人机智能协同系统重点实验室,在神经控制多功能假肢系统的研究与开发上取得了一系列进展。
长期以来,战争、疾病、自然灾害、交通事故及其他各种意外伤害造成了成千上万人的肢体残疾,为截肢者安装假肢是恢复其肢体功能的主要手段。研究和开发先进的假肢及假肢控制系统,改善和提高假肢的操控性能,为众多截肢者提供高性能、智能化、多功能的假肢,不仅可以提高他们的生活品质,增加就业机会,还能极大地降低国家、社会和家庭为他们付出的服务成本。
传统的假肢系统存在功能单一、操控缓慢、动作笨拙、维护困难等问题。随着先进的信号处理技术和高性能微处理器的发展,一些先进的假肢控制方法得以实现。表面肌电(sEMG)信号由肌肉兴奋时所募集的运动单位产生的多个动作电位序列(MUAPT)在皮肤表面叠加而成,是一种非平稳的微弱信号。通过在残留肢体肌肉表面采集sEMG信号并进行解码,能够获取截肢者的运动神经信息,识别运动意图,实现多自由度假肢控制。
众所周知,大多数截肢者都存在一种幻觉,认为因截肢而失去的肢体依然存在,这被称为“幻肢感”。当截肢者通过“想象”用他们的幻影肢体做某一动作时,大脑产生的运动神经信号使残存肌肉收缩,产生肌电信号。用模式识别的方法解码该肌电信号,可以得到截肢者想要做的肢体动作类型,控制系统便可驱动假肢完成相应的动作。利用这种控制方法,假肢使用者可以自然而直接地选择并完成他们想要做的不同肢体动作。
研究表明,针对前臂截肢的情况,该方法对10个不同手臂动作的识别精度高达90%以上。中国科学院深圳先进技术研究院李光林博士团队研发了一个3自由度的机器人前臂,使用者可以灵活地操控该前臂做6个日常生活中常用的动作,包括4个腕部动作(手腕的弯曲与伸展、内旋与外旋)和两个手部动作(手掌的张开与握紧),实现了前臂假肢的自然控制。
截肢者通过“想象”用“幻影手”做某一动作时,在残存肌肉采集表面肌电信号并解码,便可得到截肢者的运动意图,用于多自由度假肢控制

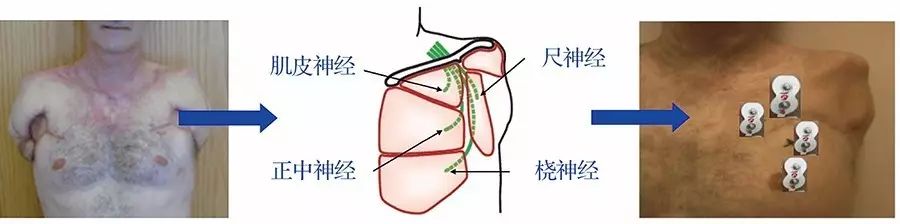
对于高位截肢者,由于肢体残留肌肉有限或完全丧失,因此不能为多功能假肢提供足够的肌电控制信息。为此,人们提出了利用神经机器接口技术获取更多的假肢控制信息,其中最有效的技术之一是肢体运动神经分布重建技术。神经功能重建是将残留的臂丛神经移植到人体肌肉(称之为靶点肌肉)或吻合到替代神经来实现缺失运动功能信号源的重建。对于肩部截肢者,将残留臂丛神经移植到胸部肌肉,经过数月的生长,臂丛神经便会在胸部肌肉内重建。当截肢者通过“想象”做幻影手臂的某一动作时,运动指令会通过臂丛神经传递至胸部肌肉并引起胸部肌肉收缩。采集胸部肌肉的sEMG并进行解码分析,就可预测截肢者的手臂运动意图,实现对多自由度假肢的神经控制。
运动神经重建技术已经在多功能神经假肢控制中取得了初步成功,并得到了国际学术界的极大关注。李光林博士在美国芝加哥康复研究院全程参与了该技术的研究与开发。目前,该团队在国内开展了肢体运动神经分布重建技术研究。于2015年与深圳市南山区人民医院合作,成功为一例上臂截肢患者进行了运动神经功能重建手术。这是我国乃至亚洲第一例神经重建手术。手术后,患者能感觉到手、手指和手臂的存在,在做手部和腕部动作时有了明显的区分。利用重建神经,实现了多功能假肢的动作控制。
通过靶点肌肉神经分布重建技术在目标替代区域重建丧失的手臂神经,并在该区域采集与手臂运动相关的表面肌电信号,可实现多自由度假肢控制
运动和感觉功能的协调统一是实现假肢手自然、精确抓握物体的关键。目前,假肢控制研究主要着重于运动功能的实现;虽然感觉功能也得到了一定的关注,但假肢手仍然不能为使用者提供直觉的感觉神经反馈,也不能根据感觉信息精准调控抓握动作及力度。手在抓握过程中所涉及的主要感觉信息,如接触、握紧、滑动、脱离、力度大小等,都与触觉信息相关。
目前的商业化假肢手并不具备直觉的触觉神经反馈功能,使用者无法自然地感受外界刺激,只能依靠视觉反馈,判断待抓握物体的软硬、轻重等信息,估计所需的抓握力度,再发出包含运动意图的控制信号(如sEMG信号),驱动假肢手执行抓握动作。视觉反馈固然重要,但对于假肢手的精准运动控制却远远不够。使用者往往无法根据视觉信息作出准确判断,抓握力度完全由视觉反馈和人脑反应控制,容易造成“过抓紧”而损坏物体,或“欠抓紧”而使物体滑落。同时,基于视觉反馈的假肢控制需要使用者保持注意力高度集中,容易造成较大的精神负担。
随着人机交互技术的进步,研究人员尝试了多种触觉反馈方式,包括利用机械振动等信号作用于身体某处的间接刺激、基于神经接口技术的感觉皮层电刺激和外周神经电刺激等。但间接刺激的反馈方法是非直接、非直觉的,需要长时间的训练过程来适应,同时还会对正常的肢体运动带来干扰;而感觉皮层电刺激和外周神经电刺激的反馈方法离临床应用还有较大的差距,刺激电极的生物兼容性问题影响了反馈的长期稳定性,且二次手术会带来风险和成本,也降低了用户的接受程度。
在肢体残端对残留神经采用表面电刺激的反馈方式既比较直觉,在技术上又容易实现,风险和成本都较低。通过调整刺激参数,能将较多的触觉信息直觉地反馈至截肢者。从低成本、可靠、易于集成、低功耗、用户接受度高等方面综合考虑,表面电刺激将是一段时间内的研究和应用重点。李光林博士团队已开展了基于表面电刺激的触觉反馈研究,初步研究表明,通过在肢体残端采用不同幅值、频率、脉宽的电信号对残留神经进行刺激,有望实现直觉、自然的触觉神经反馈。
方鹏:中国科学院深圳先进技术研究院副研究员。
李光林:中国科学院深圳先进技术研究院研究员。
2030年的电网
脑机接口 心想事成
反思计算机科学入门课程










