本期主要介绍该种雷达测试的过程与结果。
首先对DBF雷达样机进行了二维平面中目标定位的室外测量。主要模块和场景设置如图1所示,其中CR1,CR2和CR3分别为三个代表放置在不同位置目标的角反射镜。该测量使用单通道发射,并使用具有四个元件的均匀线性阵列(ULA)和间隔为2.8λ的间隔元件进行接收。

图
1
测试主要模块
(
a)与场景设置(b)
测量系统参数和信号参数总结在表1中。通过使用具有更大的元件间距的天线阵列可以改善角度分辨率。
表
1
雷达
信号参数表
|
parameters
|
|
Sampling rate
|
2 GS/s
|
|
Waveform
|
Upchirp 100 MHz – 250 MHz
|
|
Bandwidth
|
150 MHz
|
|
Pulse length
|
10.0 us
|
|
Center RF frequency
|
9.55 GHz
|
|
Range resolution
|
1.0 m (theoretical)
|
|
Azimuth resolution
|
6.5° (theoretical)
|
测试最终得到的结果如图2所示,
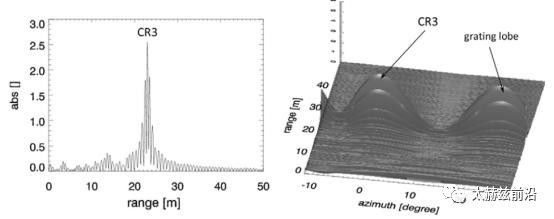
图
2 用于目标CR3的测量距离线(左)和包含目标CR3与栅瓣的3D图像(右)
图2(左)显示了对应于目标CR3并由单个接收通道获取的距离压缩回波信号。其中Sa函数的大小表示作为点目标与传输信号卷积的的角反射器的响应,23 m处的最大值则对应于CR3和天线之间的距离。图2(右)示出了对应于相同目标CR3的距离和方位压缩回波信号的3D图,其中左叶是目标的实际响应,右边的波瓣表示第一个光栅。
将对应于所有三个目标位置的处理数据绘制在图3中。
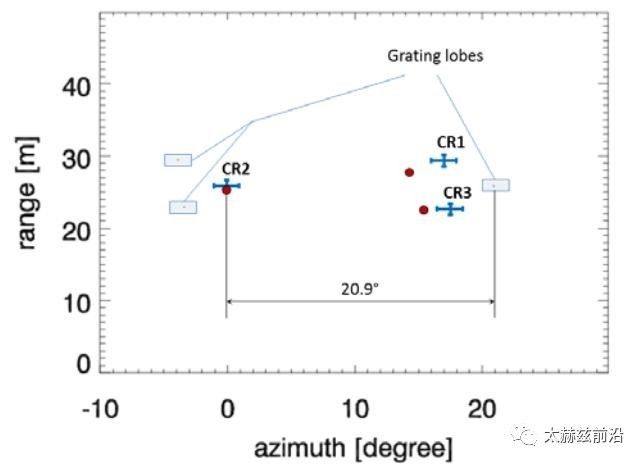
图
3
单发射信道四数字接收信道的
DBF雷达样机在2D平面中的目标定位测量结果
矩形表示栅瓣的位置;三个点表示角反射器的实际位置。测量结果的处理表明,栅瓣映射着周期性出现在成像区域中的目标。这是由于使用的聚焦算法包含正弦和余弦函数,因而具有周期性。光栅瓣的重复周期由等式(1)给出:

其中λ是发射信号的波长,Δyr是天线元件的中心之间的距离,ν是栅瓣指数。将测量设置相关参数代入方程(1),ν = 1,发现栅瓣和目标回波之间的理论角距离为20.9°,与图3所示的实验结果一致。
该结果范围测量比率误差最大值为5.8%,然而,角度测量的比率误差相对较高,达到目标CR1和CR3之间角度差值的52%。测量数据和实际数据之间的差异主要由以下几点造成,角度分辨率过低,测量结果中存在叠加随机波动,以及用于目标定位的仪器的精度有限等。该团队表示这些因素可以通过进一步的系统开发或使用额外的校准方法得到部分补偿,从而将测量不确定度降至最低。
此种先进DBF雷达获得的结果仅是未来空间多模态雷达系统开发的第一步,其他类似技术还有诸如使用正交波形的MIMO成像雷达,DBF合成孔径雷达(SAR)和反射器 DBF系统。与目前现有的SAR传感器相比,这些系统中采用的创新成像技术有可能大大提高未来太空雷达的成像性能。
点击以下链接,查看往期回顾。
德国航空航天中心研制出新一代MIMO雷达(一)
德国航空航天中心研制出新一代MIMO雷达(二)





