
作者:w7ay@知道创宇404实验室
日期:2019年10月12日
Zmap和Masscan都是号称能够快速扫描互联网的扫描器,十一因为无聊,看了下它们的代码实现,发现它们能够快速扫描,原理其实很简单,就是实现两种程序,一个发送程序,一个抓包程序,让发送和接收分隔开从而实现了速度的提升。但是它们识别的准确率还是比较低的,所以就想了解下为什么准确率这么低以及应该如何改善。
首先是看的
Masscan
[1]
的源码,在readme上有它的一些设计思想,它指引我们看
main.c
中的入口函数
main()
,以及发送函数和接收函数
transmit_thread()
和
receive_thread()
,还有一些简单的原理解读。
在后面自己写扫描器的过程中,对Masscan的扫描速度产生怀疑,目前Masscan是号称6分钟扫描全网,以每秒1000万的发包速度。
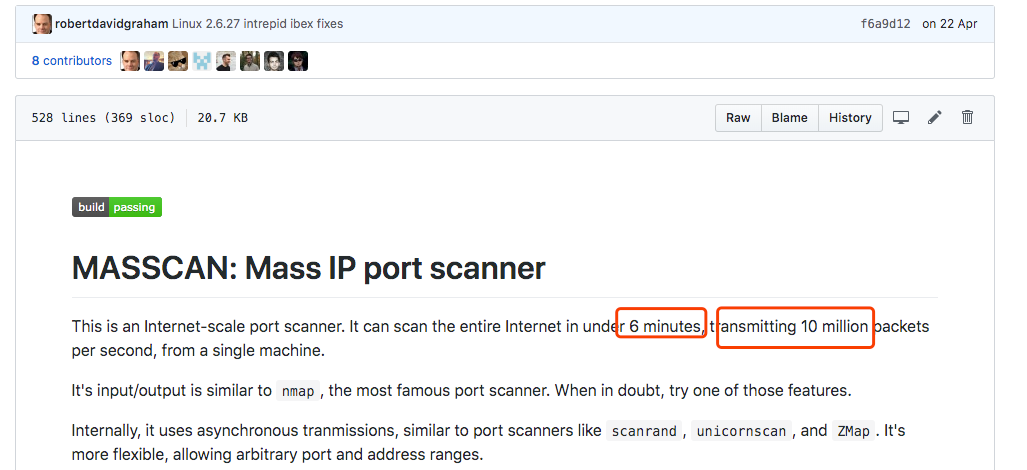
但是255^4/10000000/60 ≈ 7.047 ???
之后了解到,默认模式下Masscan使用
pcap
发送和接收数据包,它在Windows和Mac上只有30万/秒的发包速度,而Linux可以达到150万/秒,如果安装了PF_RING DNA设备,它会提升到1000万/秒的发包速度(这些前提是硬件设备以及带宽跟得上)。
注意,这只是按照扫描
一个
端口的计算。
PF_RING DNA设备了解地址:
http://www.ntop.org/products/pf_ring/
在Zmap的
主页
[2]
上说明了
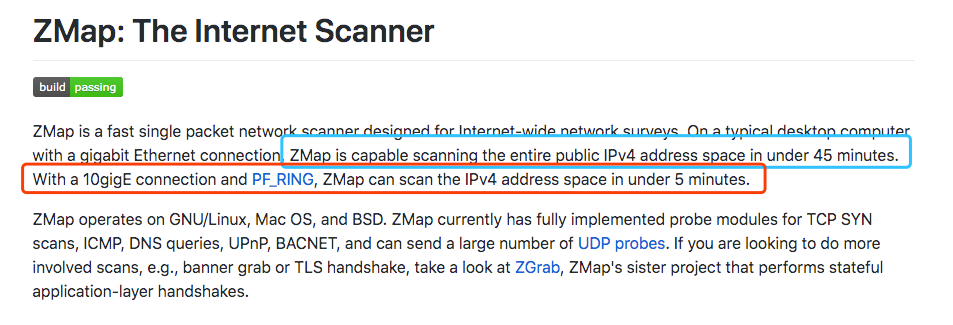
用PF_RING驱动,可以在5分钟扫描全网,而默认模式才是45分钟,Masscan的默认模式计算一下也是45分钟左右才扫描完,这就是宣传的差距吗 (-
观察了readme的历史记录
https://github.githistory.xyz/robertdavidgraham/Masscan/blob/master/README.md
之前构建时会提醒安装
libpcap-dev
,但是后面没有了,从releases上看,是将静态编译的
libpcap
改为了动态加载。
c10k也叫做client 10k,就是一个客户端在硬件性能足够条件下如何处理超过1w的连接请求。Masscan把它叫做C10M问题。
Masscan的解决方法是不通过系统内核调用函数,而是直接调用相关驱动。
主要通过下面三种方式:
1.定制的网
络
驱动
M
asscan可以直接使用PF_RING DNA的驱动程序,该驱动程序可以直接从用户模式
向网络驱动程序发送数据包而不经过系统内核。
2.内置tcp堆栈
直接从tcp连接中读取响应连接,只要内存足够,就能轻松支持1000万并发的TCP连接。但这也意味着我们要手动来实现tcp协议。
3.不使用互斥锁
锁的概念是用户态的,需要经过CPU,降低了效率,Masscan使用
rings
来进行一些需要同步的操作。与之对比一下Zmap,很多地方都用到了锁。
•
为什么要使用锁?
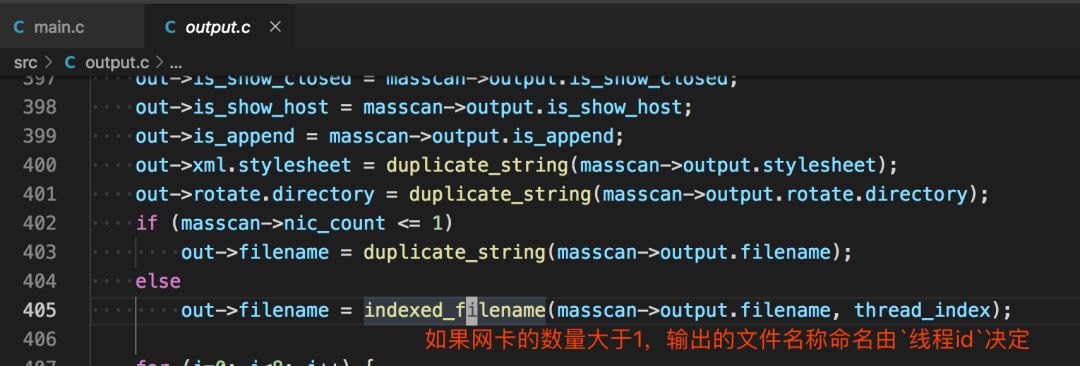
一个网卡只用开启一个接收线程和一个发送线程,这两个线程是不需要共享变量的。但是如果有多个网卡,Masscan就会开启多个接收线程和多个发送线程,这时候的一些操作,如打印到终端,输出到文件就需要锁来防止冲突。
•
多线程输出到文件
Masscan的做法是每个线程将内容输出到不同文件,最后再集合起来。在
src/output.c
中
在读取地址后,如果进行顺序扫描,伪代码如下
for (i = 0; i < range; i++) { scan(i);}
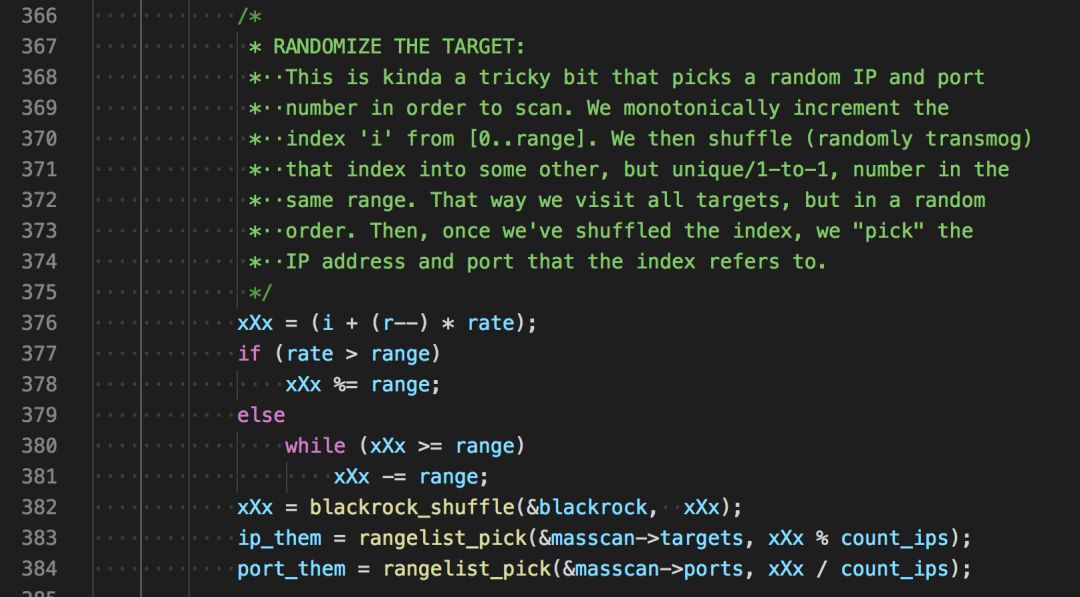
但是考虑到有的网段可能对扫描进行检测从而封掉整个网段,顺序扫描效率是较低的,所以需要将地址进行随机的打乱,用算法描述就是设计一个
打乱数组的算法
,Masscan是设计了一个加密算法,伪代码如下
range = ip_count * port_count;for (i = 0; i < range; i++) { x = encrypt(i); ip = pick(addresses, x / port_count); port = pick(ports, x % port_count); scan(ip, port);}
随机种子就是
i
的值,这种加密算法能够建立一种一一对应的映射关系,即在[1...range]的区间内通过
i
来生成[1...range]内不重复的随机数。同时如果中断了扫描,只需要记住
i
的值就能重新启动,在分布式上也可以根据
i
来进行。
•如果对这个加密算法感兴趣可以看 Ciphers with Arbitrary Finite Domains
[3]
这篇论文。
回顾一下tcp协议中三次握手的前两次
1.客户端在向服务器第一次握手时,会组建一个数据包,设置syn标志位,同时生成一个数字填充seq序号字段。
2.服务端收到数据包,检测到了标志位的syn标志,知道这是客户端发来的建立连接的请求包,服务端会回复一个数据包,同时设置syn和ack标志位,服务器随机生成一个数字填充到seq字段。并将客户端发送的seq数据包+1填充到ack确认号上。
在收到syn和ack后,我们返回一个rst来结束这个连接,如下图所示
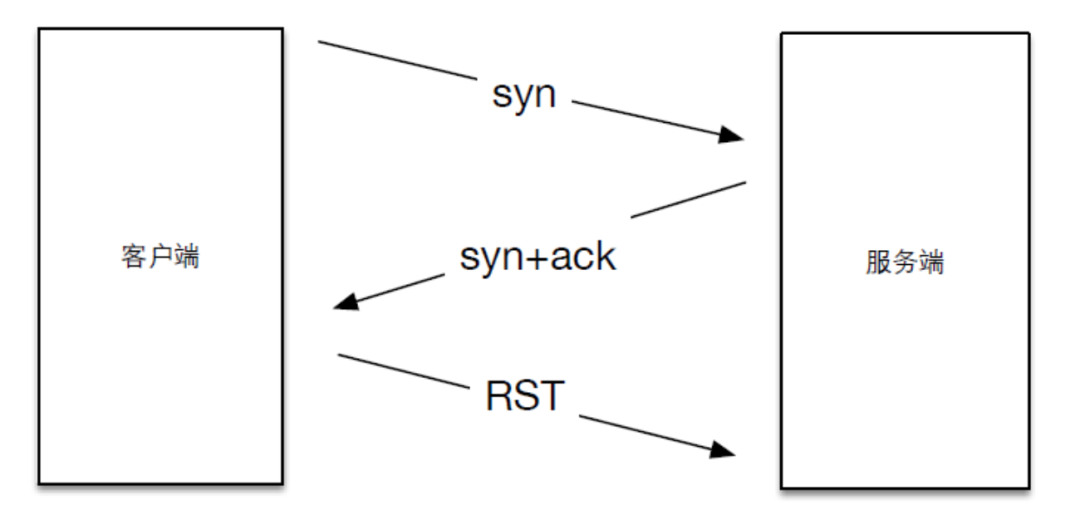
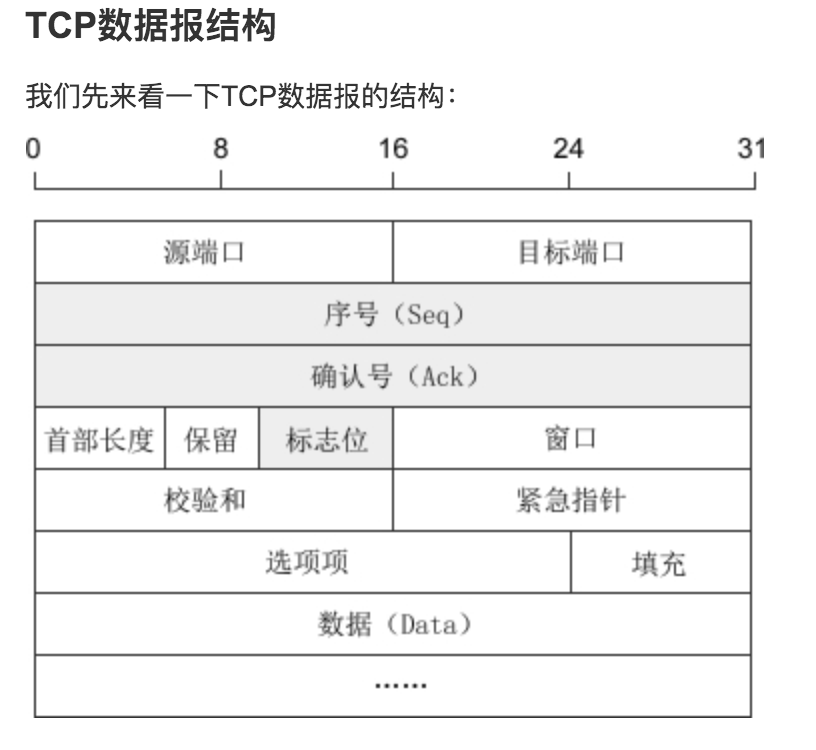
Masscan和Zmap的扫描原理,就是利用了这一步,因为seq是我们可以自定义的,所以在发送数据包时填充一个特定的数字,而在返回包中可以获得相应的响应状态,即是无状态扫描的思路了。接下来简单看下Masscan中发包以及接收的代码。
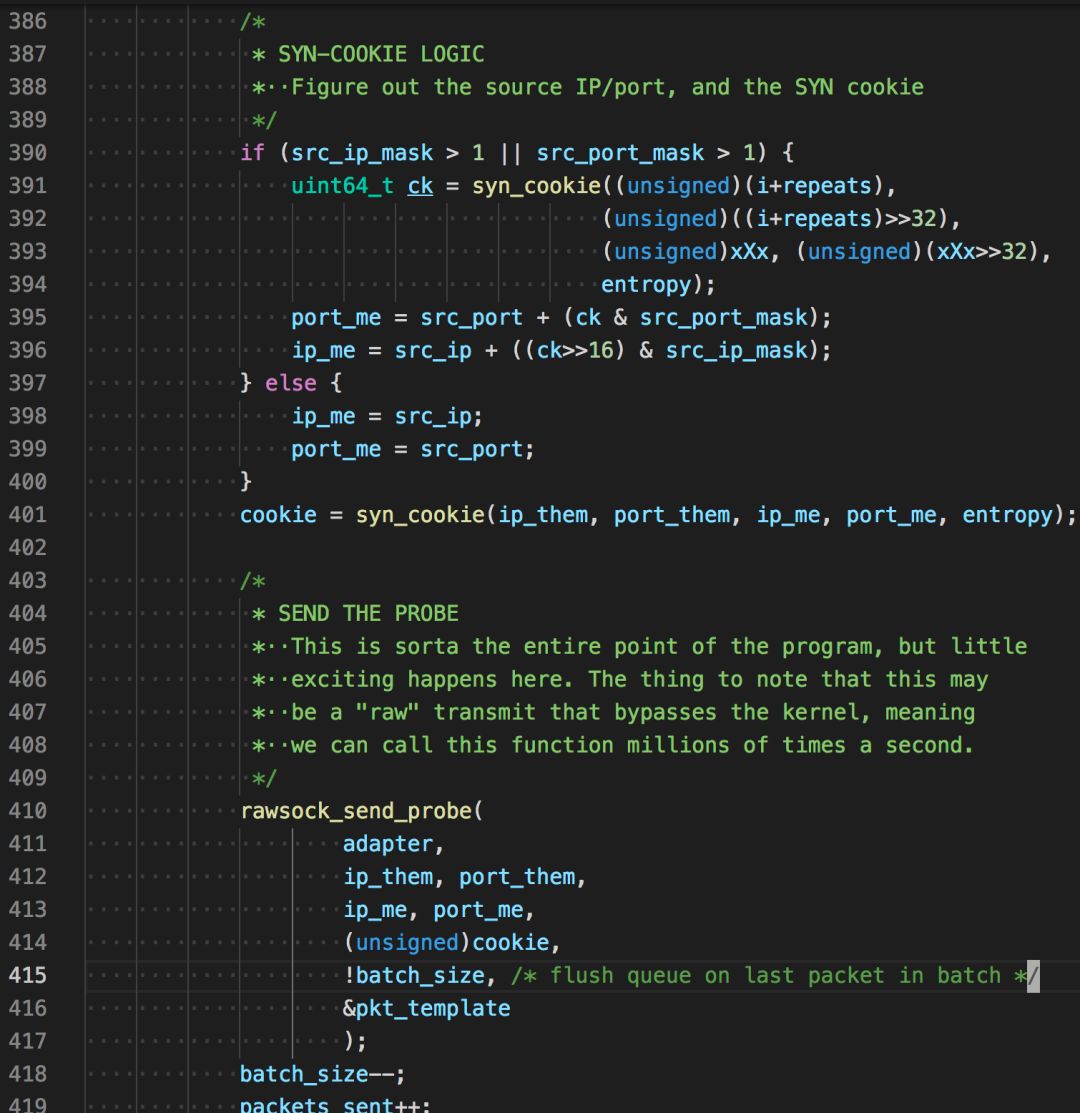
在
main.c
中,前面说的随机化地址扫描
接着生成cookie并发送
uint64_tsyn_cookie( unsigned ip_them, unsigned port_them,unsigned ip_me, unsigned port_me,uint64_t entropy){unsigned data[4];uint64_t x[2];
x[0] = entropy; x[1] = entropy;
data[0] = ip_them; data[1] = port_them; data[2] = ip_me; data[3] = port_me;return siphash24(data, sizeof(data), x);}
看名字我们知道,生成cookie的因子有源ip,源端口,目的ip,目的端口,和entropy(随机种子,Masscan初始时自动生成),siphash24是一种高效快速的哈希函数,常用于网络流量身份验证和针对散列dos攻击的防御。
组装tcp协议
template_set_target()
,部分代码
case Proto_TCP: px[offset_tcp+ 0] = (unsigned char)(port_me >> 8); px[offset_tcp+ 1] = (unsigned char)(port_me & 0xFF); px[offset_tcp+ 2] = (unsigned char)(port_them >> 8); px[offset_tcp+ 3] = (unsigned char)(port_them & 0xFF); px[offset_tcp+ 4] = (unsigned char)(seqno >> 24); px[offset_tcp+ 5] = (unsigned char)(seqno >> 16); px[offset_tcp+ 6] = (unsigned char)(seqno >> 8); px[offset_tcp+ 7] = (unsigned char)(seqno >> 0);
xsum += (uint64_t)tmpl->checksum_tcp + (uint64_t)ip_me + (uint64_t)ip_them + (uint64_t)port_me + (uint64_t)port_them + (uint64_t)seqno; xsum = (xsum >> 16) + (xsum & 0xFFFF); xsum = (xsum >> 16) + (xsum & 0xFFFF); xsum = (xsum >> 16) + (xsum & 0xFFFF); xsum = ~xsum;
px[offset_tcp+16] = (unsigned char)(xsum >> 8); px[offset_tcp+17] = (unsigned char)(xsum >> 0); break;
发包函数
/***************************************************************************
* wrapper for libpcap's sendpacket * * PORTABILITY: WINDOWS and PF_RING * For performance, Windows and PF_RING can queue up multiple packets, then * transmit them all in a chunk. If we stop and wait for a bit, we need * to flush the queue to force packets to be transmitted immediately. ***************************************************************************/intrawsock_send_packet( struct Adapter *adapter, const unsigned char *packet, unsigned length, unsigned flush){ if (adapter == 0) return 0;
/* Print --packet-trace if debugging */ if (adapter->is_packet_trace) { packet_trace(stdout, adapter->pt_start, packet, length, 1); }
/* PF_RING */ if (adapter->ring) { int err = PF_RING_ERROR_NO_TX_SLOT_AVAILABLE;
while (err == PF_RING_ERROR_NO_TX_SLOT_AVAILABLE) { err = PFRING.send(adapter->ring, packet, length, (unsigned char)flush); } if (err < 0) LOG(1, "pfring:xmit: ERROR %d\n", err); return err; }
/* WINDOWS PCAP */ if (adapter->sendq) { int err; struct pcap_pkthdr hdr; hdr.len = length; hdr.caplen = length;
err = PCAP.sendqueue_queue(adapter->sendq, &hdr, packet); if (err) { rawsock_flush(adapter); PCAP.sendqueue_queue(adapter->sendq, &hdr, packet); }
if (flush) { rawsock_flush(adapter); }
return 0; }
/* LIBPCAP */ if (adapter->pcap) return PCAP.sendpacket(adapter->pcap, packet, length);
return 0;}
可以看到它是分三种模式发包的,
PF_RING
,
WinPcap
,
LibPcap
,如果没有装相关驱动的话,默认就是pcap发包。如果想使用PF_RING模式,只需要加入启动参数
--pfring
在接收线程看到一个关于cpu的代码
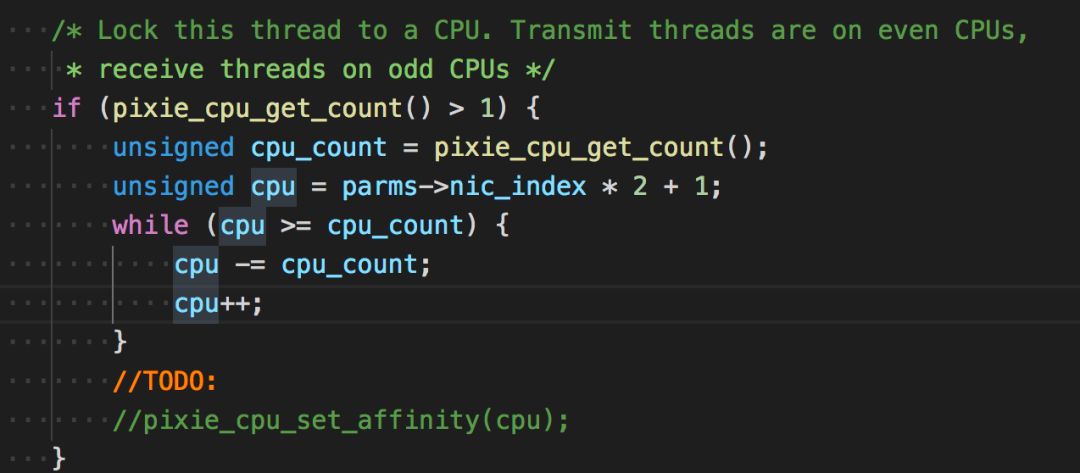
大意是锁住这个线程运行的cpu,让发送线程运行在双数cpu上,接收线程运行在单数cpu上。但代码没怎么看懂
接收原始数据包
int rawsock_recv_packet( struct Adapter *adapter, unsigned *length, unsigned *secs, unsigned *usecs, const unsigned char **packet){
if (adapter->ring) { /* This is for doing libpfring instead of libpcap */ struct pfring_pkthdr hdr; int err;
again: err = PFRING.recv(adapter->ring, (unsigned char**)packet, 0, /* zero-copy */ &hdr, 0 /* return immediately */ ); if (err == PF_RING_ERROR_NO_PKT_AVAILABLE || hdr.caplen == 0) { PFRING.poll(adapter->ring, 1); if (is_tx_done) return 1; goto again; } if (err) return 1;
*length = hdr.caplen; *secs = (unsigned)hdr.ts.tv_sec; *usecs = (unsigned)hdr.ts.tv_usec;
} else if (adapter->pcap) { struct pcap_pkthdr hdr;
*packet = PCAP.next(adapter->pcap, &hdr);
if (*packet == NULL) { if (is_pcap_file) { //pixie_time_set_offset(10*100000); is_tx_done = 1; is_rx_done = 1; } return 1; }
*length = hdr.caplen; *secs = (unsigned)hdr.ts.tv_sec; *usecs = (unsigned)hdr.ts.tv_usec; }
return 0;}
主要是使用了PFRING和PCAP的api来接收。后面便是一系列的接收后的处理了。在
mian.c
757行
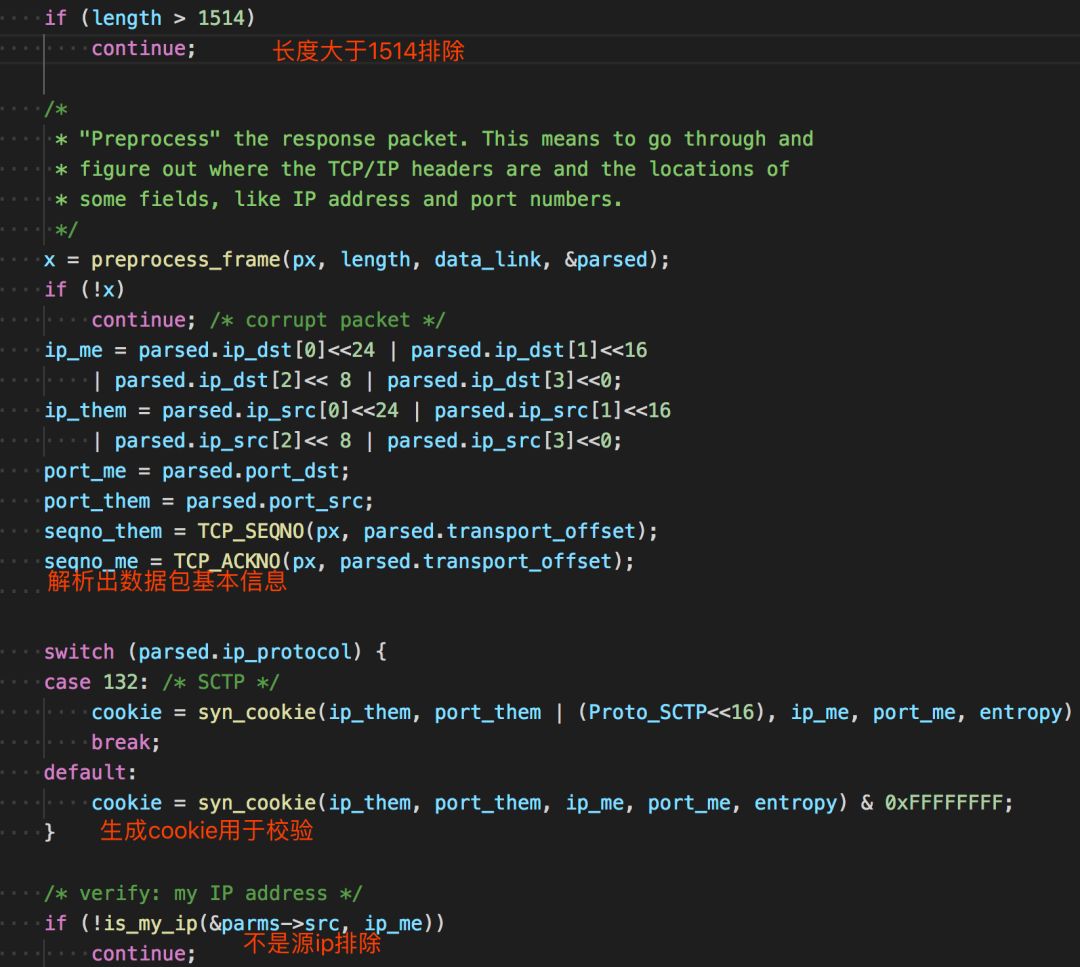
后面还会判断是否为源ip,判断方式不是相等,是判断某个范围。
int is_my_port(const struct Source *src, unsigned port){ return src->port.first <= port && port <= src->port.last;}
接着后面的处理
if (TCP_IS_SYNACK(px, parsed.transport_offset) || TCP_IS_RST(px, parsed.transport_offset)) {// 判断是否是syn+ack或rst标志位
/* 获取状态 */ status = PortStatus_Unknown;if (TCP_IS_SYNACK(px, parsed.transport_offset)) status = PortStatus_Open; // syn+ack 说明端口开放if (TCP_IS_RST(px, parsed.transport_offset)) { status = PortStatus_Closed; // rst 说明端口关闭 }
/* verify: syn-cookies 校验cookie是否正确 */if (cookie != seqno_me - 1) { LOG(5, "%u.%u.%u.%u - bad cookie: ackno=0x%08x expected=0x%08x\n", (ip_them>>24)&0xff, (ip_them>>16)&0xff, (ip_them>>8)&0xff, (ip_them>>0)&0xff, seqno_me-1, cookie);continue; }
/* verify: ignore duplicates 校验是否重复*/if (dedup_is_duplicate(dedup, ip_them, port_them, ip_me, port_me))continue;
/* keep statistics on number received 统计接收的数字*/if (TCP_IS_SYNACK(px, parsed.transport_offset)) (*status_synack_count)++;
/* * This is where we do the output * 这是输出状态了 */ output_report_status( out, global_now, status, ip_them,6, /* ip proto = tcp */ port_them, px[parsed.transport_offset + 13], /* tcp flags */ parsed.ip_ttl, parsed.mac_src );
/* * Send RST so other side isn't left hanging (only doing this in * complete stateless mode where we aren't tracking banners) */// 发送rst给服务端,防止服务端一直等待。if (tcpcon == NULL && !Masscan->is_noreset) tcp_send_RST( &parms->tmplset->pkts[Proto_TCP], parms->packet_buffers, parms->transmit_queue, ip_them, ip_me, port_them, port_me,0, seqno_me);
}
Zmap官方有一篇
paper
[4]
,讲述了Zmap的原理以及一些实践。上文说到Zmap使用的发包技术和Masscan大同小异,高速模式下都是调用pf_ring的驱动进行,所以对这些就不再叙述了,主要说下其他与Masscan不同的地方,paper中对丢包问题以及扫描时间段有一些研究,简单整理下
1.发送多个探针:结果表明,发送8个SYN包后,响应主机数量明显趋于平稳2.哪些时间更适合扫描
2.我们观察到一个±3.1%的命中率变化依赖于日间扫描的时间。最高反应率在美国东部时间上午7时左右,最低反应率在美国东部时间下午7时45分左右。2.这些影响可能是由于整体网络拥塞和包丢失率的变化,或者由于只间断连接到网络的终端主机的总可用性的日变化模式。在不太正式的测试中,我们没有注意到任何明显的变化
还有一点是Zmap只能扫描单个端口,看了一下代码,这个保存端口变量的作用也只是在最后接收数据包用来判断srcport用,不明白为什么还没有加上多端口的支持。
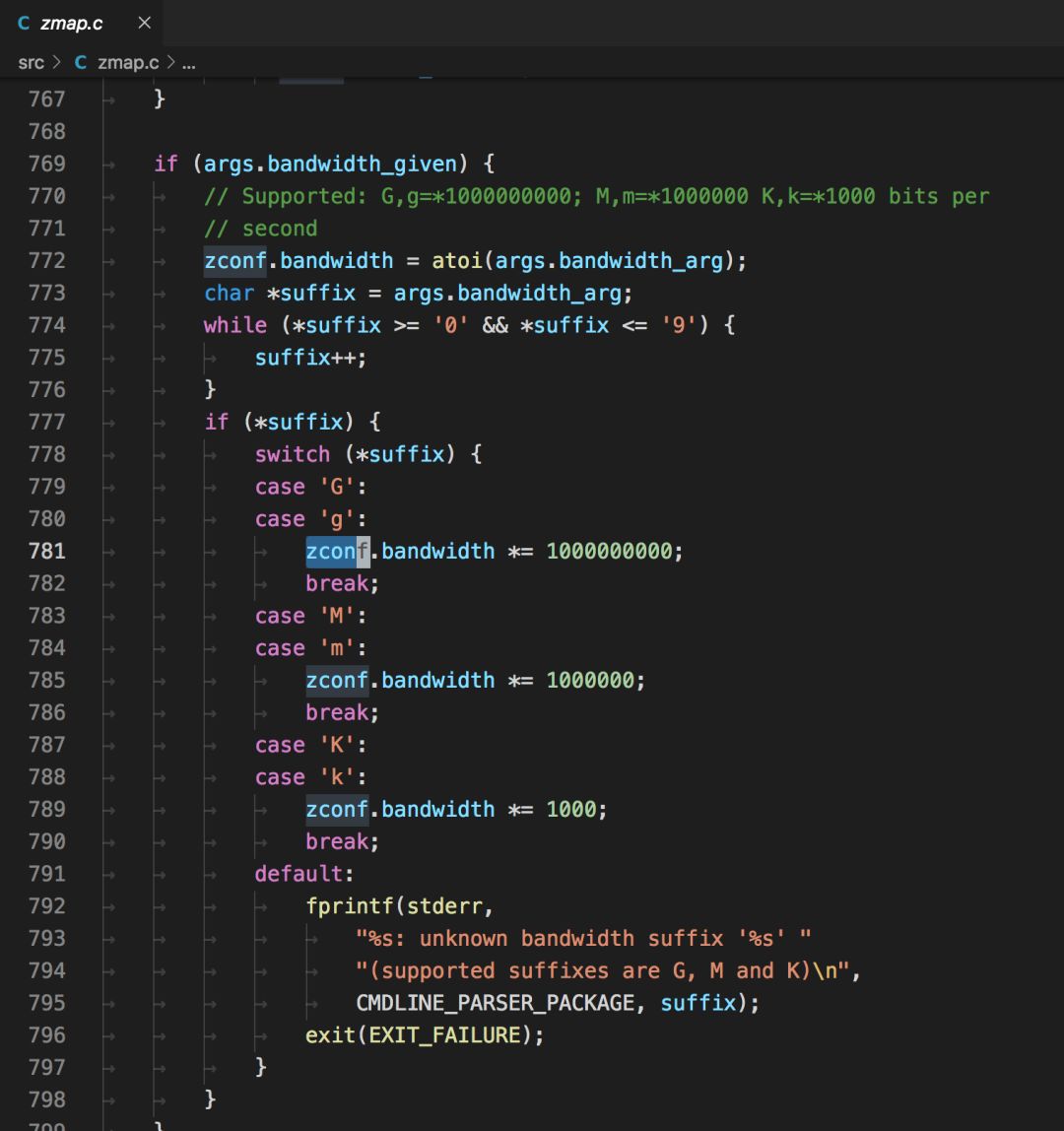
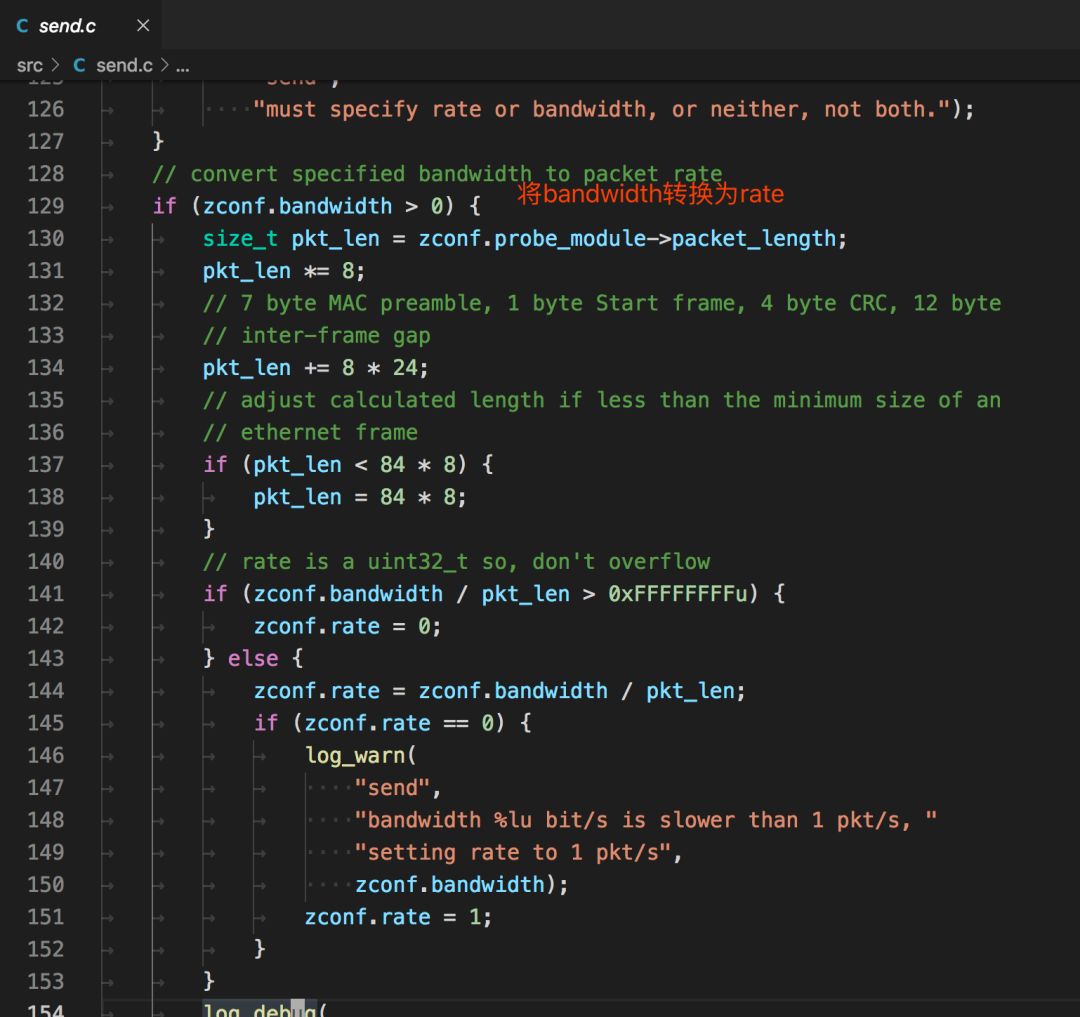
相比于Masscan用
rate=10000
作为限制参数,Zmap用
-B 10M
的方式来限制
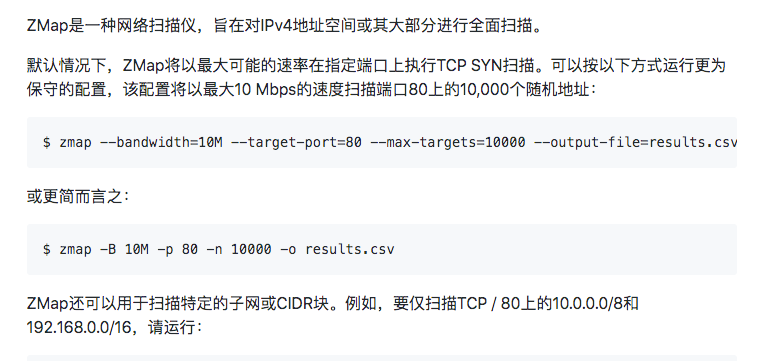
我觉得这点很好,因为不是每个使用者都能明白每个参数代表的原理。实现细节
Zmap不支持Windows,因为Zmap的发包默认用的是socket,在window下可能不支持tcp的组包(猜测)。相比之下Masscan使用的是pcap发包,在win/linux都有支持的程序。Zmap接收默认使用的是pcap。
在构造tcp包时,附带的状态信息会填入到seq和srcport中
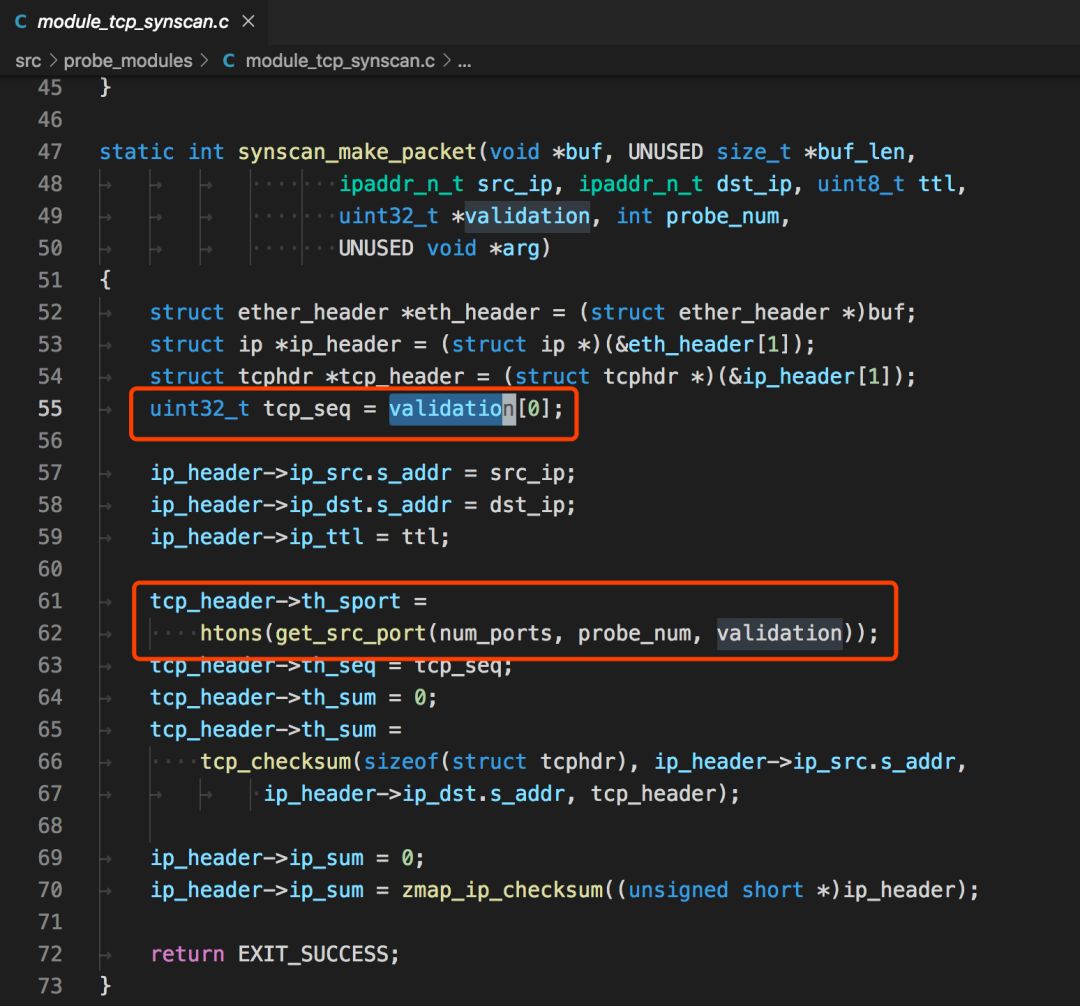
在解包时,先判断返回dstport的数据
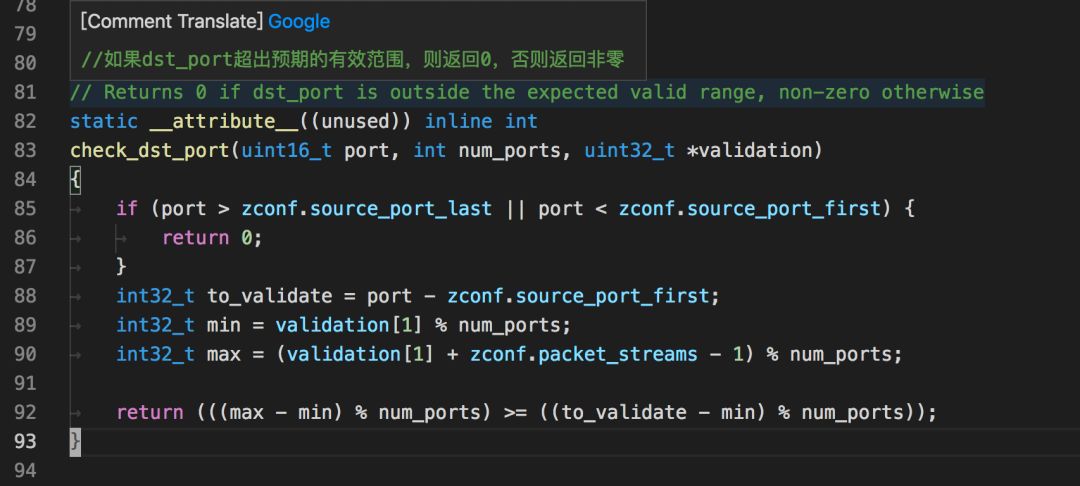
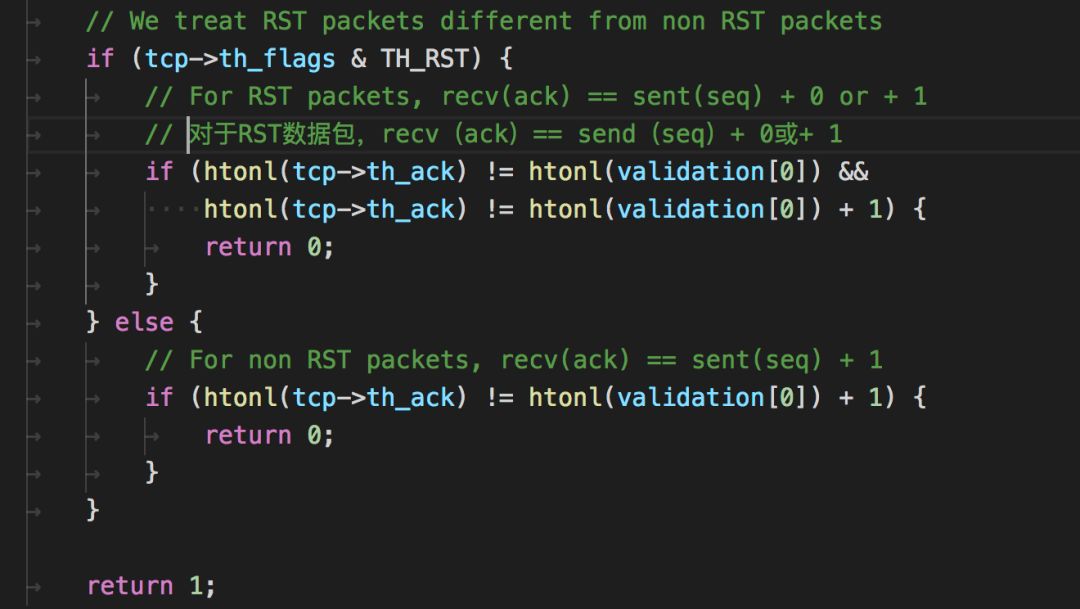
再判断返回的ack中的数据
在了解完以上后,我就准备用go写一款类似的扫描器了,希望能解决丢包的问题,顺便学习go。
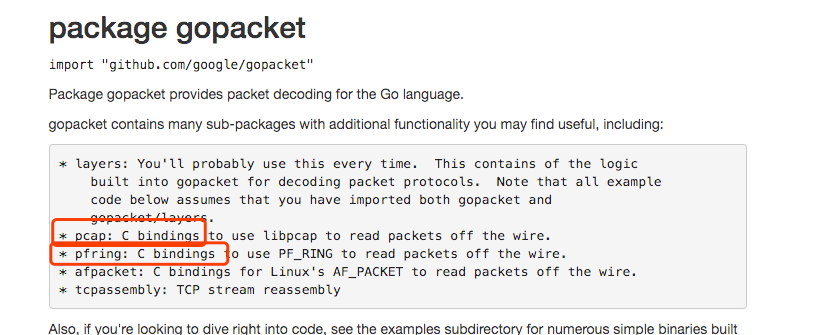
在上面分析中知道了,Masscan和Zmap都使用了pcap,pfring这些组件来原生发包,值得高兴的是go官方也有原生支持这些的包
https://github.com/google/gopacket
,而且完美符合我们的要求。
接口没问题,在实现了基础的无状态扫描功能后,接下来就是如何处理丢包的问题。
按照tcp协议的原理,我们发送一个数据包给目标机器,端口开放时返回
ack
标记,关闭会返回
rst
标记。
但是通过扫描一台外网的靶机,发现扫描几个端口是没问题的,但是扫描大批量的端口(1-65535),就可能造成丢包问题。而且不存在的端口不会返回任何数据。
刚开始以为是速度太快了,所以先控制下每秒发送的频率。因为发送和接收都是启动了一个goroutine,目标的传入是通过一个channel传入的(go的知识点)。
所以控制速率的伪代码类似这样
rate := 300 var data = []int{1, 2, 3, 4, 5, 6,...,65535} ports := make(chan int, rate)go func() { index := 0 for { OldTimestap := time.Now().UnixNano() / 1e6
for i := index; i < index+rate; i++ { if len(datas) <= index { break } index++ distribution
} if len(datas) <= index { break } Timestap := time.Now().UnixNano() / 1e6 TimeTick := Timestap - OldTimestap if TimeTick < 1000 { time.Sleep(time.Duration(1000-TimeTick) * time.Millisecond) } } fmt.Println("发送完毕..") }()
即使将速度控制到了最小,也存在丢包的问题,后经过一番测试,发现是防火墙的原因。例如常用的
iptables
,其中拒绝的端口不会返回信息。将端口放行后再次扫描,就能正常返回数据包了。
此时遇到的问题是有防火墙策略的主机如何进行准确扫描,一种方法是扫描几个端口后就延时一段时间,但这不符合快速扫描的设想,所以我的想法是维护一个本地的状态表,状态表中能够动态修改每个扫描结果的状态,将那些没有返回包的目标进行重试。
Ps:这是针对一个主机,多端口(1-65535)的扫描策略,如果是多个IP,Masscan的
随机化地址扫描
策略就能发挥作用了。
设想的结构如下
// 本地状态表的数据结构type ScanData struct { ip string port int time int64 // 发送时间 retry int // 重试次数 status int // 0 未发送 1 已发送 2 已回复 3 已放弃}
初始数据时
status
为0,当发送数据时,将
status
变更为1,同时记录发送时间
time
,接收数据时通过返回的标记,
dstport
,
seq
等查找到本地状态表相应的数据结构,变更
status
为2,同时启动一个监控程序,监控程序每隔一段时间对所有的状态进行检查,如果发现
stauts
为1并且当前时间-发送时间大于一定值的时候,可以判断这个ip+端口的探测包丢失了,准备重发,将
retry
+1,重新设置发送时间
time
后,将数据传入发送的channel中。
因为只是概念验证程序,而且是自己组包发送,需要使用到本地和网关的mac地址等,这些还没有写自动化程序获取,需要手动填写。mac地址可以手动用wireshark抓包获得。
如果你想使用该程序的话,需要修改全局变量中的这些值
var ( SrcIP string = "10.x.x.x" // 源IP DstIp string = "188.131.x.x" // 目标IP device string = "en0" // 网卡名称 SrcMac net.HardwareAddr = net.HardwareAddr{0xf0, 0x18, 0x98, 0x1a, 0x57, 0xe8} // 源mac地址 DstMac net.HardwareAddr = net.HardwareAddr{0x5c, 0xc9, 0x99, 0x33, 0x37, 0x80} // 网关mac地址)
整个go语言源程序如下,单文件。
package main
import ("fmt""github.com/google/gopacket""github.com/google/gopacket/layers""github.com/google/gopacket/pcap""log""net""sync""time")
var ( SrcIP string = "10.x.x.x" // 源IP DstIp string = "188.131.x.x" // 目标IP device string = "en0" // 网卡名称 SrcMac net.HardwareAddr = net.HardwareAddr{0xf0, 0x18, 0x98, 0x1a, 0x57, 0xe8} // 源mac地址 DstMac net.HardwareAddr = net.HardwareAddr{0x5c, 0xc9, 0x99, 0x33, 0x37, 0x80} // 网关mac地址)// 本地状态表的数据结构type ScanData struct { ip string port int time int64 // 发送时间 retry int // 重试次数 status int // 0 未发送 1 已发送 2 已回复 3 已放弃}
func recv(datas *[]ScanData, lock *sync.Mutex) {var ( snapshot_len int32 = 1024 promiscuous bool = false timeout time.Duration = 30 * time.Second handle *pcap.Handle ) handle, _ = pcap.OpenLive(device, snapshot_len, promiscuous, timeout)// Use the handle as a packet source to process all packets packetSource := gopacket.NewPacketSource(handle, handle.LinkType()) scandata := *datas
for { packet, err := packetSource.NextPacket()if err != nil {continue }
if IpLayer := packet.Layer(layers.LayerTypeIPv4); IpLayer != nil {if tcpLayer := packet.Layer(layers.LayerTypeTCP); tcpLayer != nil { tcp, _ := tcpLayer.(*layers.TCP) ip, _ := IpLayer.(*layers.IPv4)if tcp.Ack != 111223 {continue }if tcp.SYN && tcp.ACK { fmt.Println(ip.SrcIP, " port:", int(tcp.SrcPort)) _index := int(tcp.DstPort) lock.Lock() scandata[_index].status = 2 lock.Unlock()
} else if tcp.RST { fmt.Println(ip.SrcIP, " port:", int(tcp.SrcPort), " close") _index := int(tcp.DstPort) lock.Lock() scandata[_index].status = 2 lock.Unlock() } } }
//fmt.Printf("From src port %d to dst port %d\n", tcp.SrcPort, tcp.DstPort) }}
func send(index chan int, datas *[]ScanData, lock *sync.Mutex) { srcip := net.ParseIP(SrcIP).To4()
var ( snapshot_len int32 = 1024 promiscuous bool = false err error timeout time.Duration = 30 * time.Second handle *pcap.Handle ) handle, err = pcap.OpenLive(device, snapshot_len, promiscuous, timeout)if err != nil { log.Fatal(err) }defer handle.Close() scandata := *datasfor { _index :=
lock.Lock() data := scandata[_index] port := data.port scandata[_index].status = 1 dstip := net.ParseIP(data.ip).To4() lock.Unlock()
eth := &layers.Ethernet{ SrcMAC: SrcMac, DstMAC: DstMac, EthernetType: layers.EthernetTypeIPv4, }// Our IPv4 header ip := &layers.IPv4{ Version: 4, IHL: 5, TOS: 0, Length: 0, // FIX Id: 0, Flags: layers.IPv4DontFragment, FragOffset: 0, //16384, TTL: 64, //64, Protocol: layers.IPProtocolTCP, Checksum: 0, SrcIP: srcip, DstIP: dstip, }// Our TCP header tcp := &layers.TCP{ SrcPort: layers.TCPPort(_index), DstPort: layers.TCPPort(port), Seq: 111222, Ack: 0, SYN: true, Window: 1024, Checksum: 0, Urgent: 0, }//tcp.DataOffset = 5 // uint8(unsafe.Sizeof(tcp)) _ = tcp.SetNetworkLayerForChecksum(ip) buf := gopacket.NewSerializeBuffer() err := gopacket.SerializeLayers( buf, gopacket.SerializeOptions{ ComputeChecksums: true, // automatically compute checksums FixLengths: true, }, eth, ip, tcp, )if err != nil { log.Fatal(err) }//fmt.Println("\n" + hex.EncodeToString(buf.Bytes())) err = handle.WritePacketData(buf.Bytes())if err != nil { fmt.Println(err) } }}
func main() { version := pcap.Version() fmt.Println(version) retry := 8
var datas []ScanData lock := &sync.Mutex{}for i := 20; i < 1000; i++ { temp := ScanData{ port: i, ip: DstIp, retry: 0, status: 0, time: time.Now().UnixNano() / 1e6, } datas = append(datas, temp) } fmt.Println("target", DstIp, " count:", len(datas))
rate := 300 distribution := make(chan int, rate)
go func() {// 每秒将ports数据分配到distribution index := 0for { OldTimestap := time.Now().UnixNano() / 1e6
for i := index; i < index+rate; i++ {if len(datas) <= index {break } index++ distribution
}if len(datas) <= index {break } Timestap := time.Now().UnixNano() / 1e6 TimeTick := Timestap - OldTimestapif TimeTick < 1000 { time.Sleep(time.Duration(1000-TimeTick) * time.Millisecond) } } fmt.Println("发送完毕..") }()
go recv(&datas, lock)go send(distribution, &datas, lock)// 监控for { time.Sleep(time.Second * 1) count_1 := 0 count_2 := 0 count_3 := 0var ids []int lock.Lock()for index, data := range datas {if data.status == 1 { count_1++if data.retry >= retry { datas[index].status = 3continue } nowtime := time.Now().UnixNano() / 1e6if nowtime-data.time >= 1000 { datas[index].retry += 1 datas[index].time = nowtime ids = append(ids, index)//fmt.Println("重发id:", index)//distribution } } else if data.status == 2 { count_2++ } else if data.status == 3 { count_3++ } } lock.Unlock()if len(ids) > 0 { time.Sleep(time.Second) increase := 0 interval := 60for _, v := range ids { distribution increase++if increase > 1 && increase%interval == 0 { time.Sleep(time.Second) } } } fmt.Println("status=1:", count_1, "status=2:", count_2, "status=3:", count_3) }










