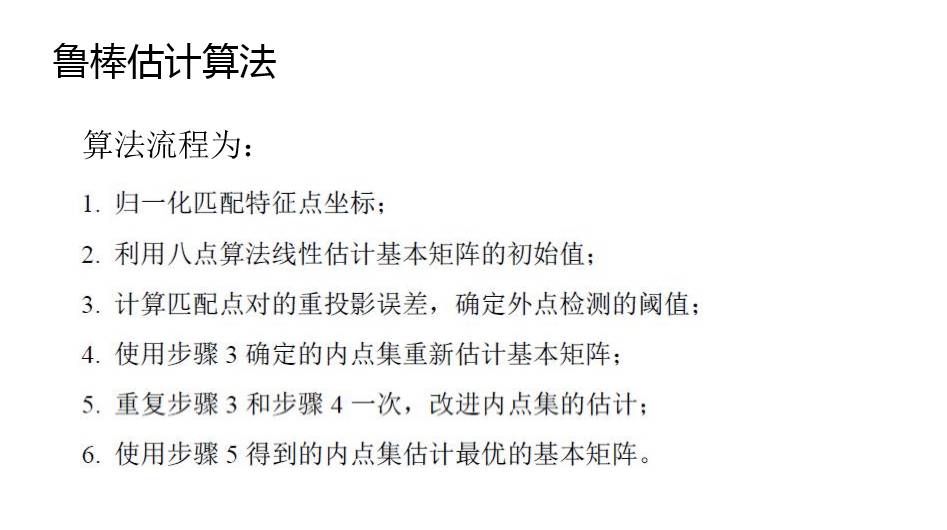
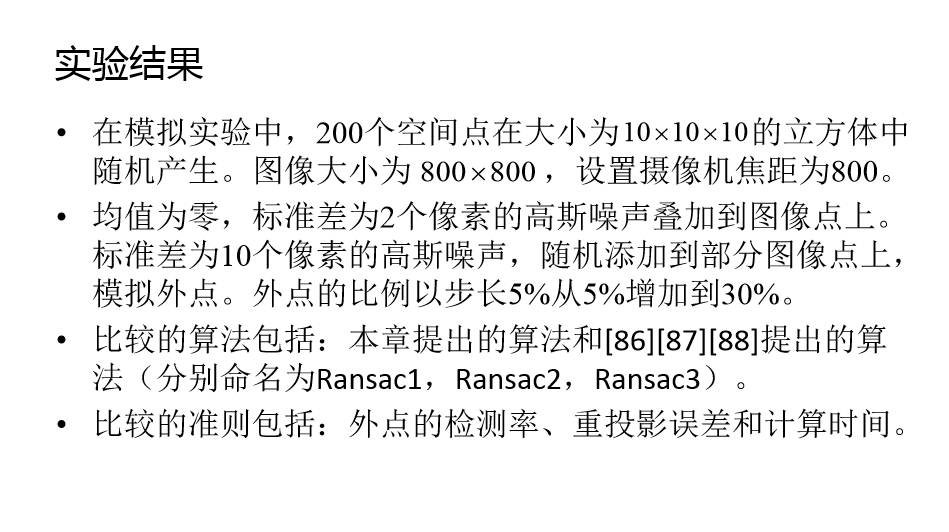
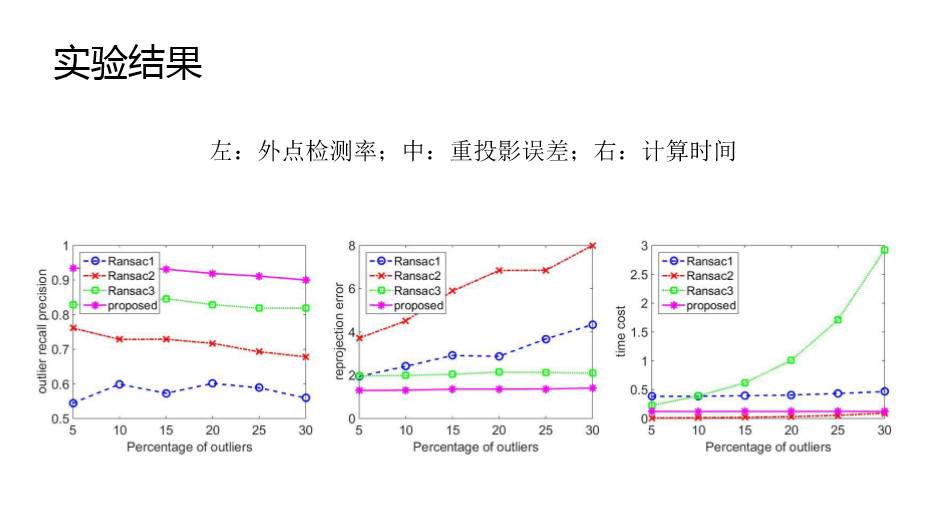
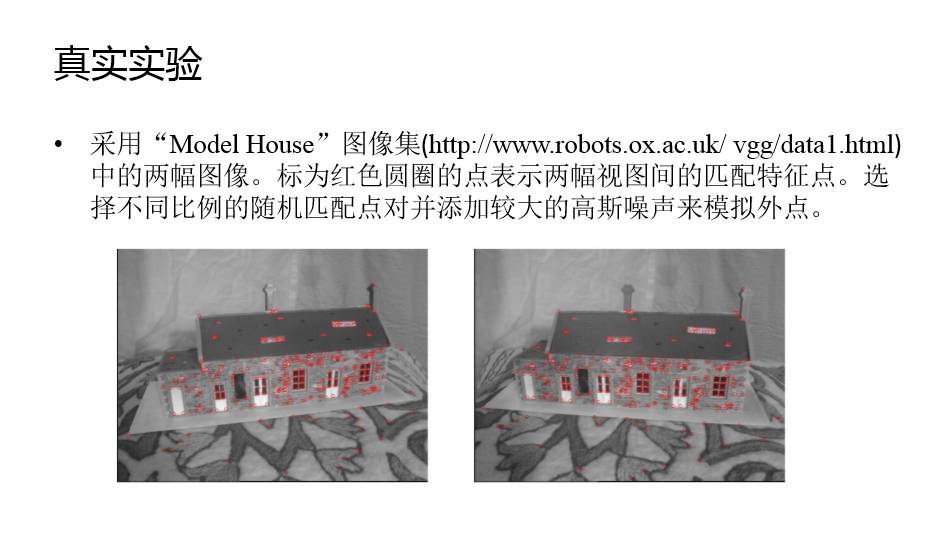
欢迎各位泡芙来到泡泡机器人公开课讲堂。今天我们邀请来了张明,由他给我们带来关于“摄像机自标定算法研究”的分享。在本节公开课中,主要分享内容如下:研究背景 、 基于Cayley变换的摄像机自标定算法 、摄像机内参数变化时的自标定算法、基于绝对对偶二次曲面的线性自标定算法及基本矩阵估计的快速鲁棒算法,讲解浅显易懂。本次课程让大家对摄像机自标定算法有了更深刻的认识,再次感谢张明的精彩分享。
文章结尾有这次课程的视频及课件的下载链接方式哟~


【资源链接】
在微信平台后面回复数字“69课”即可获得“摄像机自标定算法研究 by 张明 ”的全部资料。
【版权声明】
泡泡机器人SLAM的所有文章全部由泡泡机器人的成员花费大量心血制作而成的原创内 容,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
【转载授权】
商业转载请联系刘富强([email protected])进行授权。普通个人转载,请保留版权声明,并且在文章下方放上“泡泡机器人SLAM”微信公众账号的二维码即可。
【编辑】徐武民