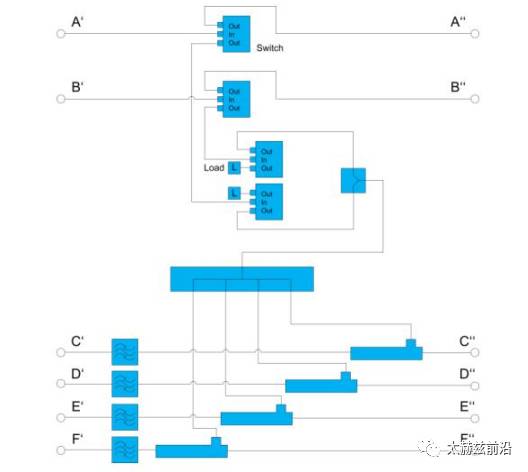
为了减少雷达系统的测量误差,必须进行校准。其中DBF雷达样机所使用的端对端系统校准程序将整个雷达测量系统的所有组件以及它们之间的电缆作为单个实体,并根据匹配滤波理论对信号进行补偿,可以有效消除组件之间的布线、仪器前端的接线引起的误差,同时可以修正系统本身引起的非线性误差与偏移误差等。
雷达系统端对端校准模块示意图如图1所示。该功能模块以硬件方式实现,集成在雷达样机中的紧凑型包装盒内,通过简单的电子转换即可实现基本的端到端系统校准信号路径,并且该过程可在硬件无拆卸的情况下完成。
通过使用该校准网络,可以将两个发射信道设置为三种操作模式之一:校准,负载或传输。在“校准”模式下,可以记录一个可以针对每个发送和接收信道可能组合的参考函数,以这种方式可以获得信号的补偿函数,将其应用于测量结果可以校正系统误差。当完成校准并且为每个通道的组合获取补偿函数后,雷达系统被切换到 “发射”模式,“发射”模式下信号通过开关组件被引导到发射天线。
使用该校准程序获得的参考信号在被数字化仪采集之后将被延迟到对应于雷达内部电缆和电线长度的系统传播时间。在进行雷达测量时,可利用该值校正回波信号的到达时间,从而精确地确定雷达目标的绝对位置。 此外,这种校准方法可以补偿由雷达组件引起的非线性误差。由于这种失真在互相关之后随时间变化基本上保持恒定,所以很容易消除这些误差的主要分量。
图
1
校准网络
示意图
对于所获取的原始数据的处理,使用图2中示意性描绘的特殊算法将成像区域聚焦在范围和方位角。来自每个通道的原始数据和副本被组合在单个阵列中,然后用快速傅立叶变换进行处理。之后将原始数据和副本相乘,并将逆傅里叶变换应用于该乘法的结果,从而获得了距离压缩信号。该信号有助于估计每个目标位置与每个数字通道之间的距离。但是,仅使用距离压缩,所有等距目标将出现在一个距离分辨率单元格内,与其角位置无关。因此要对角度信息进行处理,这里采用角度压缩的方法,通过将对应于给定角度的方位角样本振幅与复加权系数相乘,将阵列聚焦在成像区域的每个角度上,从而实现目标的分离。这使所获得图像的强度与每个角度的雷达横截面得以相关联。
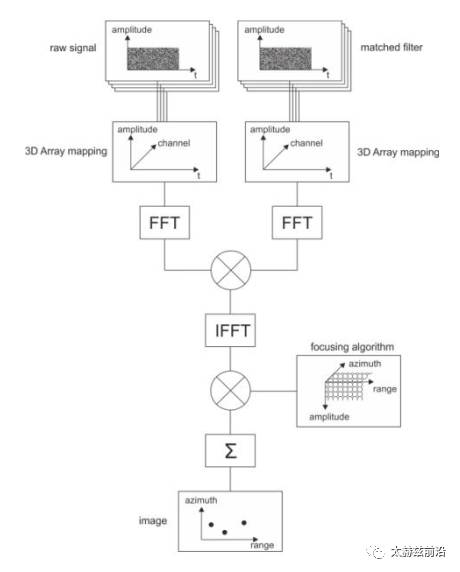
图
2
图像重建算法框图
点此超链接,查看上期推送。
德国航空航天中心研制出新一代MIMO雷达(一)





