安妮 编译整理
量子位出品 | 公众号 QbitAI
大多数汽车制造商已经开始承诺,到2020年,至少半自动驾驶汽车可以上路。麦肯锡最新发布的报告告诉你,全自动驾驶汽车离我们到底还有多远?

△ 自动驾驶概念车型NIO EVE
0. 自动驾驶的五个等级
要想搞明白这个问题,可能得先明确“自动”一词的含义。
“自动”其实指的是一个范围。国际汽车工程师协会(SAE)制定的标准,将汽车的自动程度分为五级:
Level 0:无自动化;
Level 1:驾驶员辅助。单个辅助驾驶系统能根据驾驶环境信息,以特定模式或者转向,或者执行加速、减速等操作,其他操作都由人类驾驶员完成;
Level 2:一个或多个辅助驾驶系统能根据驾驶环境信息,以特定模式同时转向或者加速减速操作,其他操作都由人类驾驶员完成;
Level 3:有条件自动化。一个自动化驾驶系统,能在动态驾驶中,全面承担驾驶任务,但在系统提出接管请求时,需要人类司机作出回应;
Level 4:高度自动化。即使在系统提出接管请求时,人类司机不能回应,这类系统也能在动态驾驶中全面承担驾驶任务;
Level 5:完全自动化。自己开车,在任何道路、任何环境状况下都不需要人类司机的介入。
虽然这两套标准划分的等级数不同,但最高等级描绘的场景均是“由无人驾驶系统完成所有的驾驶操作”,也就是我们定义的完全自动驾驶。
明确了自动驾驶的定义,我们来看看从目前状况到全自动驾驶之间,还有哪些槛。
1. ADAS面临的困境
自动驾驶功能的尝试,开始于高级辅助驾驶系统(Advanced Driver Assistance Systems),也就是常说的ADAS。处理复杂的路况及保证驾驶安全不是一件容易的事。为了完成这项任务,ADAS需要包含很多小分支,比如紧急制动、备用摄像机、自适应巡航控制和自动泊车等。
1)ADAS兼具前景+钱景
行业监管部门也开始要求在每辆车中纳入其中的一些功能。在全球范围内,ADAS系统的数量(例如夜视和盲点检测)从2014年的9000万辆增加到2016年的约1.4亿辆,仅两年就上升了50%。到2016年,ADAS总共创造了约150亿美元的市场。

△ ADAS系统近几年的需求增长、热点功能及增长率
从这张数据图可以看到,用户需求最强的是自适应前灯照明系统,其次是车道偏离预警系统和距离提醒系统。而环绕视图成为近两年增长最快的用户需求。
辅助驾驶系统的走俏受两方面因素的影响,一是上面所说的用户的需求增长,另一方面是系统价格的下降。麦肯锡最近的一项调查显示,对于配置不同的ADAS系统,司机愿意额外花费500至2500美元来购买。
ADAS看来要将“前景”和“钱景”具于一身了。
2)ADAS面临的挑战
辅助驾驶功能无疑会带来运输新时代,但行业仍需克服一些挑战才能实现自动驾驶。ADAS解决方案可以减轻驾驶的负担,同时也带来一个问题:司机过于信任新系统,可能会造成额外的安全事故。
这也不是凭空担忧。回想二十世纪九十年代安全气囊进入主流市场时,一些司机与乘客开始停止佩戴安全带,因此导致了额外的伤害和死亡。
同样,ADAS可能使司机过分依赖这个程序,可怕的是,目前的ADAS系统还并不完善。比如,系统并不能有效识别静止的物体,司机很有可能撞上前面静止等红灯的车辆或是其他路边静物。很多早期使用者意识不到ADAS是如此的局限。
此外,由于半自动驾驶汽车的司机可能会在驾驶中进行阅读、发消息等其他活动,因此当需要他们重新掌控自驾车时需要一段时间熟悉路况调整驾驶 。有证据表明,司机离开驾驶的时间越长,重新适应的时间就越长。
这就给自动驾驶汽车公司提供了新的难题,或许他们需要开发更好的人机界面降低这个隐患,而不是造成更多的事故。
2. 从辅助驾驶到全自动驾驶
1)五年后,自动驾驶会达到里什么水平?
高度自动化水平的实现离我们也没几年时间了,接下来的五年可能会出现SAE标准中的L4型车辆,也就是高度自动化水平——由无人驾驶系统完成所有操作,人类驾驶员不一定需要对所有系统请求做出应答。
辅助系统需要经过严密的测试才能最终投产,虽然工程师已经开始着手测试系统性能,但验证它可能需要数十年的时间。一是由于系统需要适应大量不同的路况,二是要保证在不同情况下的安全性。之所以达不到L5,就在于五年后我们不能保证系统能搞定任何环境设施和特征。
2)全自动驾驶?十年内看不到
鉴于目前的发展趋势,未来十年之内达不到全自动驾驶水平。
现在,硬件的发展水平已经快要满足自动驾驶的需求了,CPU和GPU也可以提供足够的计算力。所以,实现L5级别无人车的障碍,主要是开发所需的软件系统。
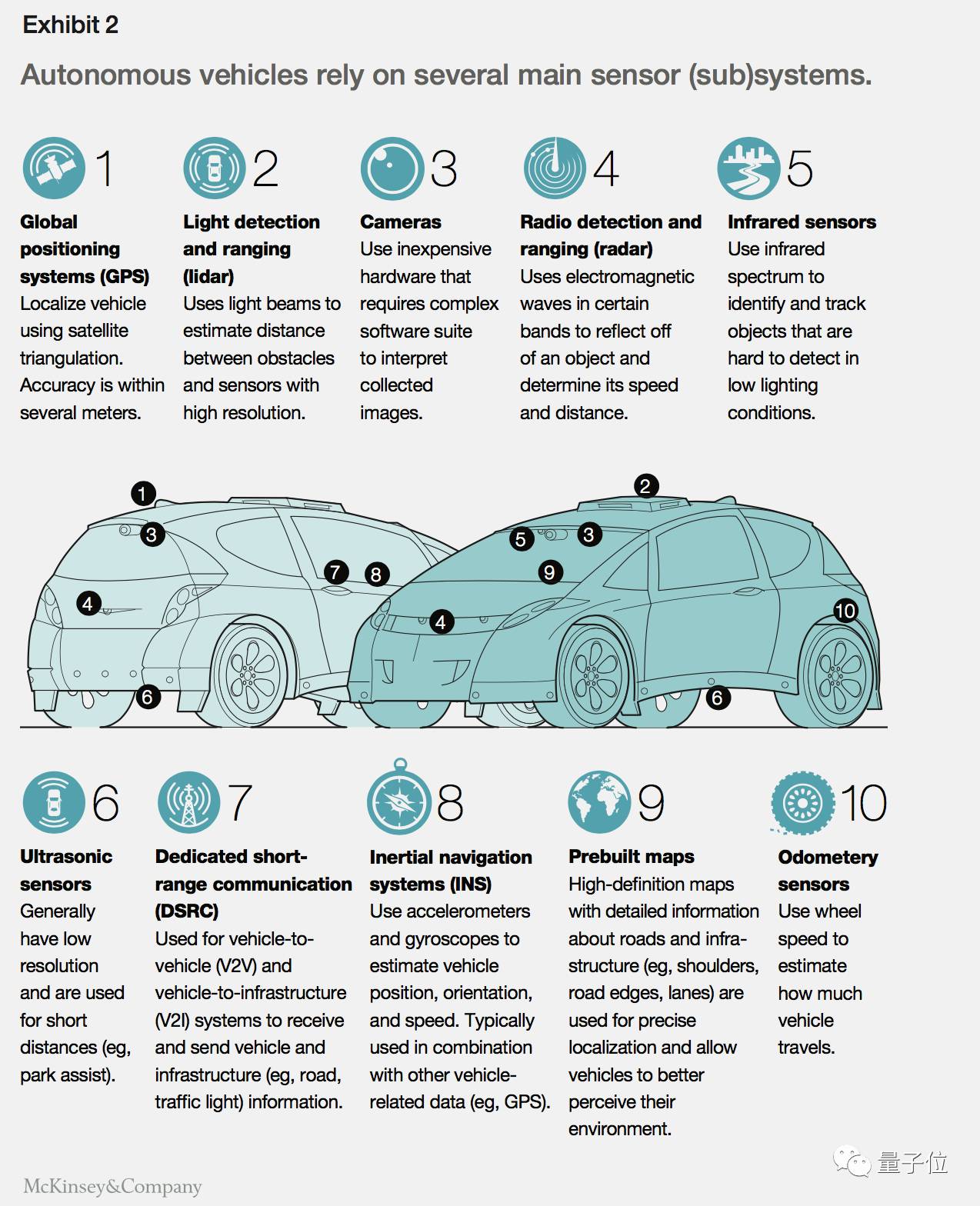
在上面麦肯锡报告图中我们可以看到,自动驾驶汽车的传感器需要包含许多功能,如全球定位系统(GPS)、激光雷达、摄像头、雷达、红外传感器、朝圣传感器、专用短程通讯DSRC、惯性导航系统INS、预先构建地图、测距传感器等。
3)直面系统软件问题
对于软件系统来说,以下三个问题亟待解决:
首先,无人车需要一个更好的人机交互界面,也需要更好地协调与其他无人车之间的关系。
其次,需要建立更好的无人车决策机制,让它们学会协调多种情景,执行不同的任务。
最后,我们还呼吁建立一个故障安全机制,在无人驾驶系统失效时也不会让乘客陷于危险之中。
这三个问题对现在的无人车系统来说是不小的挑战,也需要用冗长的时间进行测试。
3. 全面自动驾驶需要解决的问题
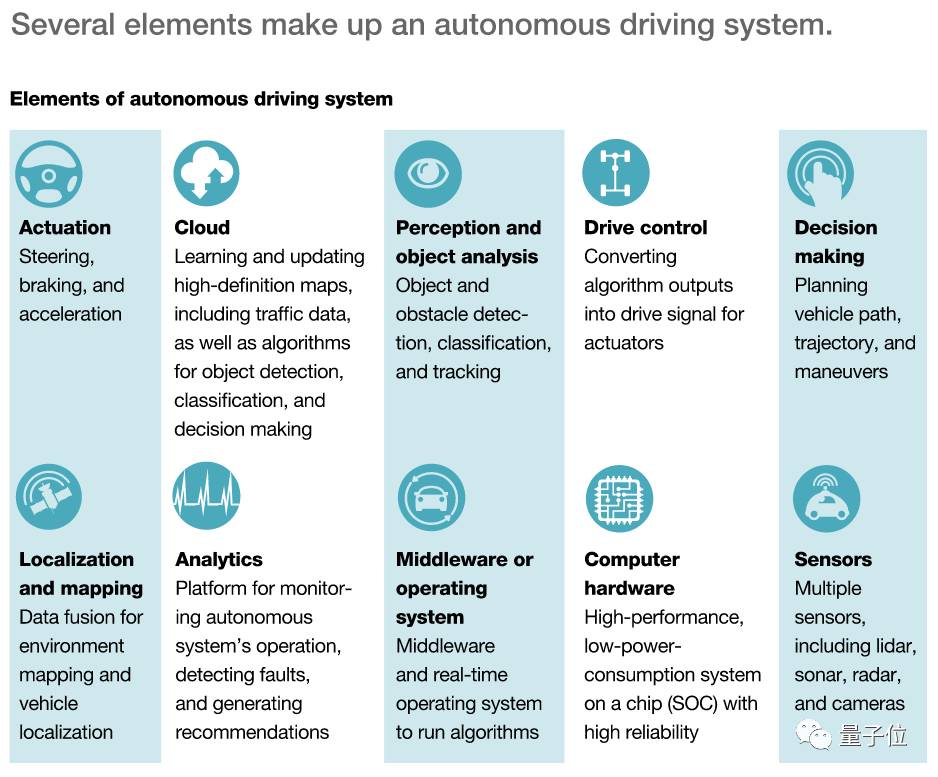
无人车在上路之前,需要解决的问题可不少。自驾系统需要考虑的要素有很多,包括分析、决策、定位、感知等方面的因素。
1)自驾系统三要素
在所有这些要素中,感知、地图构建和定位是最受研究人员关注的。
感知的目标是以最少的测试和里程实现可靠的感知水平。依靠雷达、声纳和相机感知环境中的其他车辆和物体。
而地图构建的两大方向又包括构建高清全景地图和构建特征地图。前者是为了使车辆沿着目标线路行进,后者使为了通过道路特征得以导航。
定位是通过识别车辆在其环境中的确切位置,有效决定去哪里该如何导航的关键步骤。这个也不难理解,目前手机上的各种地图一般均有定位功能。
2)决策系统
上述的必要因素如同人体内的器官,具备了这些器官人类得以生存,无人车具备了上述的要素也就具备了自动驾驶的能力——但是,人类还需要一个大脑指导行动,无人车当然也需要一个决策系统确定最终的行进路线。
全自动驾驶汽车可以为每一英里的旅行做出成千上万种决定,这种行为就叫做决策。目前构建决策系统可以有三种方法:
一是构建神经网络;
二是基于规则的决策,程序员需要输入进所有的if-then规则的组合;
三是混合决策法,程序员通过引入特定的神经网络来解决由集中的神经网络连接的单个进程,从而解决神经网络固有的复杂性,之后用规则进行补充。
在上面的三种方法种,混合统计法是当今最流行的一种决策方法。










