
01 虚空射箭、隔空打字、智能点击,Facebook智能腕带实现全新“脑控”方式

近期Facebook 现实实验室向所有人秀了一把他们在 AR 交互领域取得的新成果:一款神奇的腕带设备。这款腕带设备开启了全新的动态控制,其中一项核心技术肌电描记术(EMG)发挥了重要作用,该技术可以将微妙的神经信号转化为一系列动作。具体而言,该腕带内置 EMG 感应器,用于接收从脊髓传输至手腕和手指的运动神经电信号,并转化为操控装置的数码指令。
佩戴这款腕带,你还可以自由地移动光标。这款腕带还支持触觉反馈,创建了一个响应能力比基础手势跟踪设备更强的系统,比如,虚空射箭;未来还将无缝集成到日常生活中,比如,点亮立式灯、无键盘打字。理论上,腕带可以做很多事情。例如,当你打字时,它可以追踪你的大脑在打字时发送给手指的神经信号,这样你就可以在虚拟键盘上进行输入,而不需要物理按键。与普通的键盘不同,腕带可以慢慢的适应你打字的方式,因此,当你拼写常见的拼写错误时,它们可以“学习”你的手指移动的方式,然后自动纠正,捕捉你可能想要输入的内容。对于人与计算机的交互来说,这将是一个巨大的改变,但从概念上讲,相比于几年前脑机接口初创公司 CTRL-Labs 所开发的信号腕带来说,并不是主要的更新。
来源:机器之心
02 特斯拉又失控了!车头撞稀碎,安全气囊竟未打开?特斯拉:没撞对位置
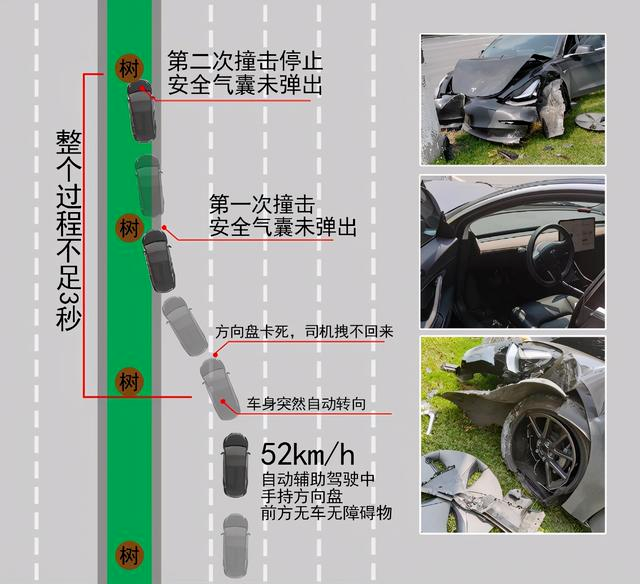
特斯拉不愧是“甩锅中的不粘锅”,近日,国内一辆特斯拉Model 3在自动驾驶辅助状态下无故转向,车辆撞停,车头严重损毁,但全车8个安全气囊无一打开,对此,特斯拉竟回应:没撞对位置,车没有任何问题。
Autopilot开启,车辆无故转向,方向盘卡死,车辆撞停,安全气囊未打开......没错,特斯拉又撞了!这次是在国内。驾驶员是一个有着七年驾龄的老司机,0事故。司机送完小孩去学校,独自一人开着特斯拉Model 3回家。当开到事发地点时,路况良好,车辆不多,而且距离比较远。司机开启自动辅助驾驶功能(AP),单手扶方向盘,时速52.5公里(官方数据),正常行驶中车辆突然自动左转,司机条件反射的想转回方向盘,但这个时候方向盘已经卡死,根本转不动。车辆随后窜上绿化带,左前方蹭到一棵树,速度仍然没有降低,直接正面撞上第二棵树,车辆撞停。车头几乎报废、树都撞断了,安全气囊丝毫未打开。这次事故最令人费解的莫过于全车8个安全气囊自始至终都没有打开过。对此疑惑,特斯拉技术主管回复,因为没有撞击到触发点,所以气囊没有弹出,没有问题。从事发图片可以看到,Model 3车头前部损毁严重,前机盖受力折起,轮毂破碎。好在碰撞后的驾驶室保持完好,车门可以正常打开,车主受伤也并不算严重。那是不是以后撞车时都要在电光火石间认准触发点呢?
来源:新智元
03 当“AI”对上“AI”,骚扰电话能否被扼杀在“苗芽”?

随着AI技术的提高和普及,在造福人类的同时,给社会带来的烦恼也越来越多,就比如骚扰电话也开始利用AI。当毫无情感、不知疲倦的机器人成为骚扰电话拨打者时,手机用户愈发的不堪其扰。搭上人工智能的快车后,升级版的骚扰电话无疑是“社会毒瘤”。想要从根本上杜绝这一现象,除了在监管上的完善,技术上同样需要跟进。
事实上,已经有一些公司开始涉足这一行业。首当其冲的必然是与电话这一媒介有着紧密联系的运营商们。去年12月百度智能云与中国电信联合打造出可以代替用户接听电话、以语音和文字方式反馈给用户的“天翼智能小百通”。它可以与来电方进行多轮对话,了解对方来电意图,将应答结果实时通过短信或微信推送给用户,并定期形成报告,有效地减少用户被骚扰的概率。今年一月,联通宣布推出“沃留言”(AI助理)服务,在代接听功能中,“沃留言”可自动根据通话内容判断该通话是否为骚扰电话,进而决定是拒接还是与之对话,这样便免于用户被房产中介、贷款理财、广告推销等人员骚扰。总而言之,治理AI骚扰电话的产品已陆续出现,AI制造的问题正在由AI解决。科技没有善恶之分,虽然AI骚扰电话给生活带来了许多的困扰,但我们不能因噎废食,一味去抵制所有的AI技术,秉持宽容的态度,科技或许会带来不一样的惊喜。
来源:机器人大讲堂
04 全球首个内河无人驾驶数据集公布!清华大学等高校联合AI公司开发
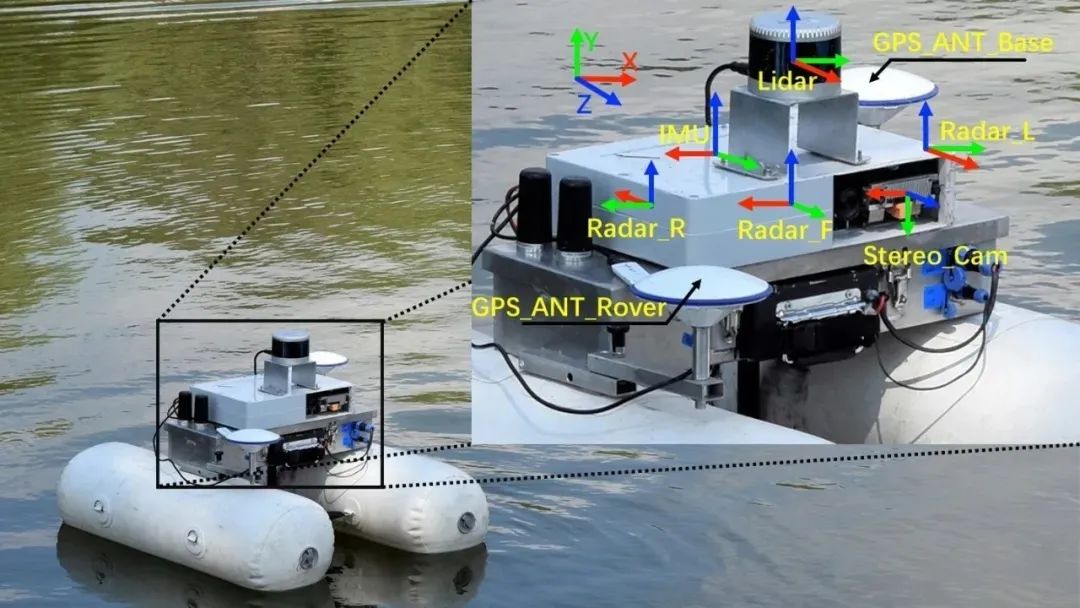
随着自动驾驶技术的发展,自动驾驶场景逐渐由路面扩展至水上,无人船(USV)及其相关应用成为近年来研究热点之一。其中,内河无人船具有极大的应用价值,如内河自主运输、测绘、水质检测和河道垃圾清理等。不同于海面无人船,内河相对狭窄和复杂的环境,对无人船的定位和感知带来了新的挑战。最近,清华大学与西北工业大学的研究人员联合欧卡智舶公开了内陆水道中无人船的多传感器数据集USVInland,旨在促进无人船领域相关研究。
据说该数据集是全球第一个内河场景下的无人船数据集。研究人员花了四个月的时间,利用自家无人驾驶船风雨无阻地在各种天气条件下、不同的时间段、以及不同的内陆河道场景中收集。USVInland数据集涵盖了内河的大多数驾驶情况,共采集到了27段原始数据,总行驶距离超过26公里。这些数据来源于无人船上安装的多个传感器,包括激光雷达系统,立体摄像机,毫米波雷达,GPS天线和惯性导航系统IMU。受到目前发布最早、影响力最大的自动驾驶算法评测数据集KITTI的启发,USVInland数据集引入了SLAM(同时定位与地图构建)、立体匹配和水岸分割任务。SLAM对于内河的无人船是必需的,尤其是在无法直接测量船的位置的情况下,数据来自无人船GPS位置和IMU姿态信息的输出。
在应用了多种算法后,研究团队证实了:将自动驾驶的通用方法应用于内河航道场景时效果并不好,也不满足无人船安全航行的要求。接下来,他们将计划继续拓展数据集,例如更多的历史数据,以便对现实世界内陆水道中的USV的长期SLAM进行研究。
来源:机器人大讲堂










