ICRA,全名是IEEE International Conference on Robotics and Automation,相信泡芙们都不陌生。今年ICRA2017(5.29-6.3)在美丽的新加坡举行,主题是“Innovation, Entrepreneurship, and Real-world Solutions”,应该有不少泡芙亲临现场,欢迎大家在下方留言讲讲感受哈!

泡泡机器人特将SLAM方向的论文整理出来,根据文章的侧重点,分为以下几类,仅供参考。
语义SLAM
[1]
Probabilistic Data Association for Semantic SLAM
[2]SemanticFusion: Dense 3D Semantic Mapping with Convolutional
Neural Networks
SLAM系统
[1]Visibility Enhancement for Underwater Visual SLAM based on Underwater Light Scattering Model
[2]Multi-UAV Collaborative Monocular SLAM
[3]Keyframe-based Dense Planar SLAM
[4]RGB-T SLAM: A Flexible SLAM Framework By Combining
Appearance and Thermal Information
[5]Real-time Monocular Dense Mapping on Aerial Robots
Using Visual-Inertial Fusion
[6]MonoRGBD-SLAM: Simultaneous Localization and Mapping Using
Both Monocular and RGBD Cameras
[7]Real-time Local 3D Reconstruction
for Aerial Inspection using Superpixel Expansion
[8]PL-SLAM: Real-Time Monocular Visual SLAM with Points and Lines
[9]RFM-SLAM: Exploiting Relative Feature
[10]Measurements to Separate Orientation and Position Estimation
in SLAM
[11]Illumination Change Robustness in Direct Visual SLAM
[12]Monocular Visual Odometry: Sparse Joint Optimisation or Dense
Alternation
[13]RRD-SLAM: Radial-distorted Rolling-shutter Direct SLAM
[14]Application-oriented Design Space Exploration for SLAM Algorithms
[15]Convergence and Consistency Analysis for
A 3D
Invariant-EKF
SLAM
视觉定位
【VO】
[1]Robust Visual Localization in Changing Lighting Conditions
[2]Direct Monocular Odometry Using Points and Lines
[3]Accurate Stereo Visual Odometry with Gamma Distributions
[4]Semi-Dense Visual Odometry for RGB-D Cameras
Using
Approximate Nearest Neighbour Fields
[5]Direct Visual Odometry in Low Light using Binary Descriptors
【VIO】
[1]
A Comparative Analysis of Tightly-coupled Monocular, Binocular, and
Stereo VINS
[2]Attention and Anticipation in Fast Visual-Inertial Navigation
[3]High Altitude Monocular Visual-Inertial State Estimation:
Initialization and Sensor Fusion
[4]Photometric Patch-based Visual-Inertial Odometry
[5]Fast Odometry and Scene Flow from RGB-D Cameras based on
Geometric Clustering
【其他】
[1]Overlap-based ICP Tuning
for Robust Localization of a Humanoid Robot
[2]Point and line feature-based observer design on SL(3) for Homography
estimation and its application to image stabilization
[3]FLAG: Feature-based Localization between Air and Ground
[4]Gaussian Process Estimation of Odometry Errors for Localization and
Mapping
[5]Random Forests versus Neural Networks −
What’s Best for Camera Localization
[6]Fast Odometry and Scene Flow from RGB-D Cameras based on
Geometric Clustering
[7]Robust Localization and Localizability Estimation
with a Rotating Laser Scanner
三维重建
[1]Joint Pose and Principal Curvature Refinement Using Quadrics
[2]De-noising, Stabilizing and Completing 3D Reconstructions On-the-go
using Plane Priors
[3]TSDF-based Change Detection for Consistent Long-Term Dense
[4]Reconstruction and Dynamic Object Discovery
Map Quality Evaluation for Visual Localization

与深度学习结合
[1]
Self-supervised Visual Descriptor Learning for Dense Correspondence
[2]Dense Monocular Reconstruction using Surface Normals
[3]Robust Stereo Matching with Surface Normal Prediction
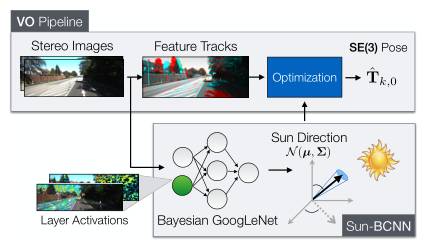
[4]Reducing Drift in Visual Odometry by Inferring Sun Direction
Using a Bayesian Convolutional Neural Network
[5]DeepVO: Towards End-to-End Visual Odometry with Deep Recurrent
Convolutional Neural Networks
[6]Efficient Descriptor Learning for Large Scale Localization
[7]Semantics-aware Visual Localization
under Challenging Perceptual Conditions
[8]Delving Deeper into Convolutional Neural Networks for Camera
Relocalization