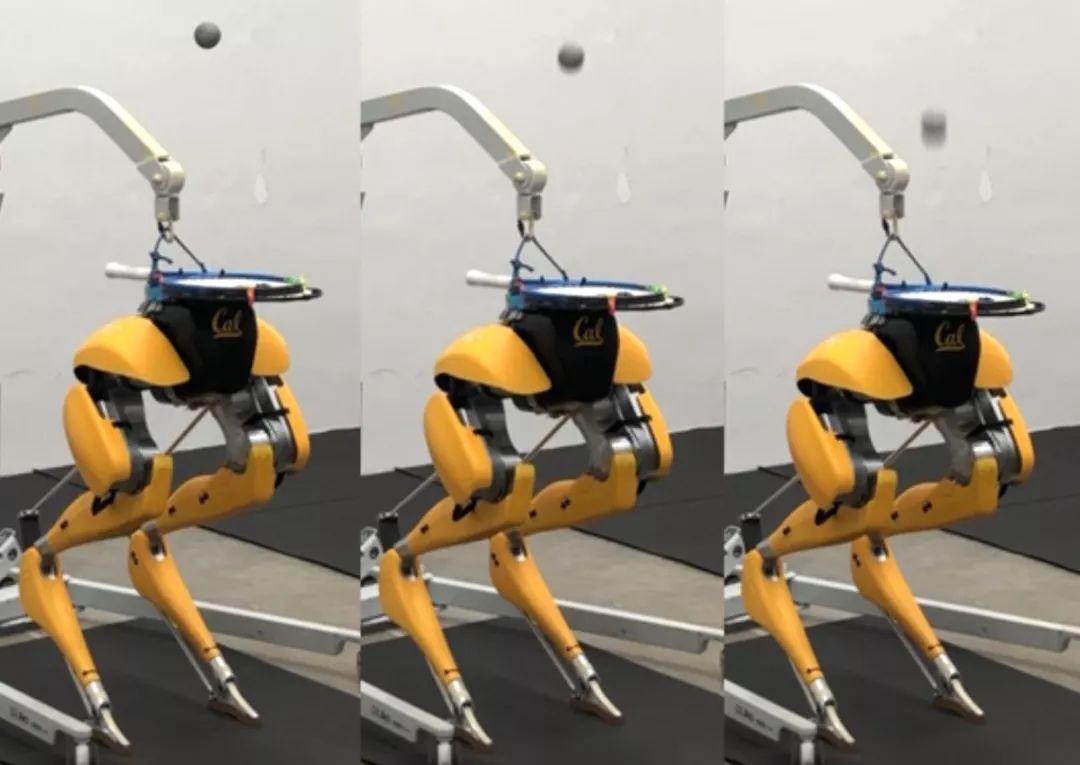
前不久我们报道过UC Berkeley的Cassie Cal机器人,该机器人具有两条腿,形象地说可以称之为躯干。
该机器人已经学会了在其顶部用球表演杂技!
这项任务的目的是当Cassie进行表演时仍可以兼顾平衡,那它也将能够进行其他的需要动态多任务处理。
如果它不能,起码不会丢掉工作,可以去马戏团有个职位~~
让我们来看看视频!
Cassie的杂技动作由外部运动捕捉系统辅助,该系统可以跟踪球的位置,但除此之外的一切动作都是自主的。
Cassie可以通过前后倾斜、左右倾斜以及上下移动来操纵球。
它在保持自己平衡的同时做到了这一点,这是本研究的重点–成功执行了两种相互耦合的动态行为。
当然,这项研究的最终目标并不是制造一个更好的杂技机器人,而是
探索动态多任务处理的方式,
这是机器人在人类环境中取得成功所必需的技能。
保持自身平
衡的情况下自动跟踪球的位置
这项工作来自于由Koushil Sreenath领导的加州大学伯克利分校混合机器人实验室做出,由Katherine Poggensee,Albert Li,Daniel Sotsaikich,Bike Zhang和Prasanth Kotaru完成。
其中一位研究人员Albert Li对我们的问题进行了解答。
如果在不依靠动作捕捉的情况下,可以让Cassie玩些什么?
我们进行运动捕捉的动机是首先解决双足机器人表演杂技的控制难题,在此基础上并不必担心实现感知。
实际上,我们布置有一台摄像机来检测球的位置,这意味着我们不必完全依靠运动捕捉系统。
但是,我们需要在可以提供最佳上部球运动视野的位置安装摄像机,同时我们还开发了一个可靠的估算器。
这个估算器尤其重要,因为当球距离相机过近时,相机实际上是无法跟踪球的运动的。
因此必须假设我们的动态模型能够足够准确地描述其运动,直到球重新弹起到可测量的位置为止。
有许多因素影响Cassie表演杂技的时间。
在仿真过程中,一般都假设球拍具有均匀的特性(如刚度和阻尼),但实际上每个表面都具有各向异性的接触特性。
同时,球拍安装在Cassie上的悬臂方式也会加剧这一差异。
由于球拍尺寸较小,球如果击打在球拍边缘,那么玩球的活动就要停止了。
当然,这在很长一段的杂技表演进程中是会必然发生的。
此外,一些较大的路径偏差可能会导致Cassie的脚稍微滑倒,最终会随着时间的推移而产生偏差累计,从而改变稳定的站立姿势。
由于此版本的控制器假定Cassie处于静止状态,因此这种位置变化最终会导致杂技表演的失败。
使用不同的球拍实现击球
边走边玩是一个非常有挑战性的问题,也是我们未来研究的目标。
这要求机器人控制球拍摆成精确的姿势以击打球,同时还要避免因错误地踩踏而产生不稳定的影响。
机器人需要控制每行走一步可以完成多少次击打,这也对该问题中隐含的数学内容和控制系统提出挑战。
目前的控制器可以在机器人不移动的情况下将球击打到指定的稳态位置,如果与行走耦合,就需要控制使机器人向前走的同时将球向前击打。
解决此类挑战将是后续研究的主要方向。
耦合玻璃套筒的球跟踪击打
您提到了协作玩耍或玩耍多个球,这是您尝试过的吗?
您能否再谈谈下一步的工作?
我们还没有进行协作杂技或多球杂技,但这是我们未来研究的目标之一。
稳定的击打多个球会引入更大的挑战。
例如,我们必须对击打的急迫性进行编码(如果第二个球没有受到足够的重击,则在回到第二个球之前,机器人只有较少的时间来打击第一个球)。
另一方面,协作式人机对战需要更高级的决策框架。
为了获得多个智能体间的混合杂技表演,机器人将需要采用某种预测人类行为的概率模型。
由于人类的行为是相当不可预测的,而且通常表现出感性,开发这样的人类行为预测模型很困难。
这也将会是未来人机协作研究的发展方向。
目前,各种机器人足球、乒乓球比赛如火如荼。
也许不久的将来,当我们独自一人时也可以体验这些团体项目了呢!
“看球Cassie!
”
“别耍赖!
站起来Cassie!
”