摘要:该文主要介绍机器人智慧工厂虚拟仿真技术,首先介绍该项技术的关键技术点,然后介绍该项技术主要解决智慧工厂以下两方面的问题:即以机器人为主体的智慧工厂从细胞单元到生产线,从售前方案环节到交付实施过程中的虚拟样机验证,以及提供离线编程底层的仿真数字化环境。
1.前言
虚拟仿真(Virtual Simulation)是智能制造领域的一门新兴技术,该技术在计算机上通过CAD/CAM/CAE等技术将产品信息集成到计算机提供的可视化虚拟环境,在实际产品制造之前实现产品的仿真、分析与优化过程。机器人智慧工厂虚拟仿真是智能制造的重要环节,可应用于生产线节拍控制分析、机器人运动控制、动力学分析、轨迹和路径规划离线编程、机器人与工作环境的相互作用等方面。随着目前智能数字化制造及工业 4.0 等先进制造技术的发展,机器人智慧工厂虚拟仿真也成为围绕产品生命周期管理(PLM)的整个数字化设计、验证及制造环境的重要组成部分。研究与开发机器人智慧工厂虚拟仿真系统,可以在虚拟环境中完成以上方面的研究工作,为机器人智能制造的发展提供新的手段。
2.机器人智慧工厂虚拟仿真技术
机器人智慧工厂虚拟仿真技术涉及多个系统的运动学与动力学建模理论及其技术实现,是基于数字和运动控制建模、仿真、信息管理、交互式用户界面和虚拟现实的综合应用技术。在智慧工厂设计的初级阶段——概念阶段就可以对整个系统进行完整的分析,观察并实验各组件的相互运动情况。通过系统虚拟仿真软件在相应虚拟环境中真实地模拟生产线的运动和节拍,在计算机上可方便地修改设计缺陷,仿真不同的布局方案,对生产线系统进行不断的改进,直至获得最优的设计方案以后,再做出物理样机。
虚拟仿真的设计方法体现出并行工程的概念和思想,是今后智能制造技术的
发展方向。与传统方法相比具有诸多优势,即在智慧工厂设计时期即确定关键的参数,更新产品开发过程,缩短开发周期、降低成本和提高产品质量。机器人智慧工厂虚拟仿真的关键技术包括以下方面:
1)系统集成性
机器人智慧工厂虚拟仿真解决方案涉及到多方面的技术,虚拟仿真执行环境需要在不同的系统间进行转换,其集成性包括以下方面:
●导入在 CAD 中建立的机器人与生产线组件的三维模型,加入机器人运动学与动力学分析算法。
●虚拟仿真中的流动节拍,机器人和外部轴的载荷速度,可达性等数据传递给分析模组,轨迹和路径规划的拓扑数据传递给离线编程模组,处理后的分析结果回传给虚拟仿真进行验证;
●生产线 PLC,机器人下位机控制系统,IO 的信号等数据上传,与虚拟仿真系统进行集成。
2)组件模型的参数化和数据库
通常一个智慧工厂的组件大约在 5 万到 10 万个(不含重复组件),大量重复使用的模型可以参数化并形成组件库,可以更快捷的变更组件和规划布局,大幅减少工程师 CAD 建模和增加运动算法的时间。
3)可视化与交互性
机器人智慧工厂虚拟仿真系统提供了良好的模型显示环境,使操作者有高真实性的沉浸感。由于具有可视化方面的优势,在布局规划过程中工程师团队可交互式探索智慧工厂的功能,充分将自身的经验和能力结合到计算机的虚拟仿真的设计过程中。

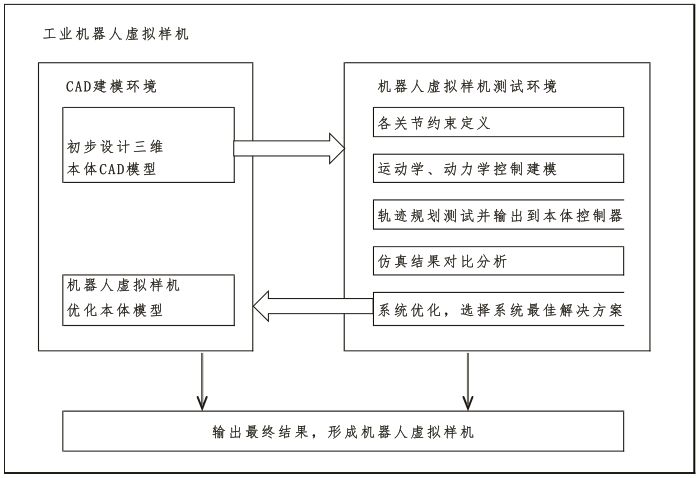
3. 工业机器人的虚拟样机构建
机器人虚拟样机将机器人技术与虚拟仿真技术相结合,针对于机器人设计与制造过程中的运动学、动力学分析,轨迹和路径规划,机器人与工作环境的相互作等技术内容进行研究与系统开发,在虚拟环境中完成机器人的设计、分析及虚拟生产过程的实现。系统的具体构成如下图 2。
机器人虚拟样机的核心功能是提供用于在计算机上进行机器人设计与开发的虚拟环境,其主要功能有以下方面:
1)可视化环境
建立可视化环境是虚拟仿真系统的基础工作,机器人的虚拟仿真可视化环境使得操作者可直观、高效地在计算机上进行机器人的设计与开发,良好的环境可使操作者方便地将自身经验和知识随时融入系统。
在虚拟仿真开发的不同阶段,机器人 CAD 模型在结构上有所不同。在虚拟样机初期的概念性设计阶段,机器人 CAD 几何模型可能较为粗略,只为满足当前设计需要,某些详细的几何结构可不必建模;在详细设计阶段,样机经过反复验证与完善,系统得到优化后的几何数据,可对样机进行详细的几何建模,形成用于仿真的机器人虚拟样机。

2)机器人本体的动作仿真
从 CAD 模型中提取的机器人几何数据并不带有运动控制算法,需要根据机器人本体结构,包括各部分的几何结构与参数、关节数量、类型等因素,通过对运动方程的正向和逆向求解,在数模上增加运动分析,同时在运动分析过程中还可实现对机器人的运动空间分析,工作轨迹规划,碰撞、干涉校验等进行仿真研究。
3)外部轴的动作仿真
通过在虚拟仿真系统中加入外包轴的数模和物理信息,如变位机的转速和惯量、滑轨的线速度等物理因素,进行动力学分析后进行耦合。
4)机器人下位机控制系统仿真
虚拟仿真可提供机器人控制系统仿真环境,机器人下位机虚拟机与虚拟仿真系统建立网络数据接口进行实时通讯,对控制系统进行测试,在这一方面虚拟仿真比物理样机具有明显优势。各种控制方法可直接作用于物理样机,高效省时,无需担心错误的控制方法造成样机的损坏。

总之,机器人虚拟样机具有如下技术特点:
1)提供机器人仿真研究的集成系统和数字化机器人设计、验证环境机器人虚拟仿真系统提供包含数字化建模、可视化的运动过程实现、运动学分析、控制系统仿真在内的统一数据平台,使各部分之间的仿真及分析结果及时、高效率地互相加以利用,提供数字化的研究环境。
2)构成数字化虚拟制造环境的有机组成部分工业机器人是制造系统中的基本工作单元,机器人虚拟仿真系统能够有效融入上一层次的数字化加工制造环境,满足虚拟制造环境中机器人工作单元上层的生产线仿真、数字化工厂要求,构成数字化机器人生产线的基础与有机组成部分。
机器人智慧工厂虚拟仿真系统对离线编程技术的促进离线编程的效果是通过虚拟仿真来验证的,离线调试程序最直观有效的方法是在不接触实际机器人及其工作环境的情况下,利用虚拟仿真技术模拟机器人的作业过程,提供一个与机器人进行交互作用的虚拟环境,将机器人仿真的结果以图形的形式显示出来,直观地显示出机器人的运动状况,从而可以得到从数据曲线或数据本身难以分析出来的许多重要信息。
智慧工厂的离线编程系统非常复杂,并非只对一个细胞单元的机器人单体做轨迹路径规划,通常一条生产线由多个机器人,工装夹具上下料系统,传送带,AGV,人员等有机构成,这些组件的运动都需要编程,每个组件编程后还需要互相建立通讯联接,这样才能让整个智慧工厂有序运转起来,智慧工厂虚拟仿真能模拟所有组件的运动,对离线编程模块进行数据反馈,找出不匹配的因子加以修正。

图 6 HedraCAM 机器人生产线的离线编程
5. 机器人智慧工厂虚拟仿真系统实现的技术手段
5.1 采用高水平的几何建模工具
三维 CAD 软件如 CATIA、Pro/E、UGS 及 SolidWorks 等都可以建立高逼真度的虚拟仿真几何模型,但对于机器人智慧工厂虚拟仿真系统这些 CAD 建模数据有先天的缺陷,最重要的问题就是数据格式庞大,一个智慧工厂通常有 5 万个以上组件组成,如果采用 CAD 软件产生的模型进行堆积,大部分智慧工厂的数据都已经超出了计算机的硬件极限。
Google SketchUp 是一个极受欢迎并且易于使用的 3D 设计软件,数据格式短小精悍,适合互联网抓取,非常合适建立智慧工厂虚拟仿真系统的几何建模,Google 公司还建立的庞大的 3D 模型库,集合了来自全球各个国家的模型资源,形成了一个很庞大的分享平台,这些模型可以下载后转换成智慧工厂虚拟仿真系统的组件库。
5.2 机器人智慧工厂虚拟仿真系统的开发工具
机器人虚拟仿真系统的开发工具主要分两类:一种是采用通用的软件开发工具,另一种是专业的虚拟仿真开发软件。
通用软件开发工具目前较常用的是 C++,特点是软件针对性强,解决设计者具体问题。但要建立样机的运动学、动力学研究等必需的详尽而正确的模型,需耗费大量时间和精力。
Python 是一种面向对象、解释型计算机程序设计语言,在机器人运动学方面使用比较普遍,Python 语法简洁而清晰,具有丰富和强大的类库。能够把用其他语言制作的各种模块(尤其是 C/C++)很轻松地联结在一起。Python 提供了丰富的 API 和工具,以便程序员能够轻松地使用 C 语言、C++来编写扩充模块,比如虚拟仿真的图形渲染模块,性能要求特别高,就可以用 C/C++重写,而后封装为Python 可以调用的扩展类库。
Adams、Envision 等是商业虚拟仿真开发工具,可建立简单的几何模型或从外部CAD 软件导人已建立完毕的机器人几何模型,系统提供运动学、动力学等方面的仿真功能,建立机器人虚拟仿真设计与优化环境,并具有完善的仿真结果数据处理能力。
6. 结束语
机器人智慧工厂虚拟仿真技术对于智能制造非常重要,该项技术的研究和开发,一方面拓展虚拟仿真技术的研究与应用范围,同时在虚拟环境下对机器人产品的设计与分析也是今后数字化设计、制造的发展方向。在智慧工厂构建中通过应用虚拟仿真技术,可使工程师在计算机就能分析与优化过程,有效地进行智慧工厂系统评估,在工厂建设之前提供最优化的设计产品。








