人工智能与机器人盛会CCF-GAIR 2017已经结束了。AI 科技评论对峰会中的精彩内容继续放出详细报道,敬请期待!
AI科技评论按:7月7日,由中国计算机学会(CCF)主办,雷锋网与香港中文大学(深圳)承办的第二届CCF-GAIR全球人工智能与机器人峰会在深圳如期开幕。在大会第一天的AI学术前沿专场,卡耐基·梅隆大学教授、美国工程院院士金出武雄做了主题为”Smart robotic systems that work in real out door enviro-ments”(户外环境下的机器人系统)的大会报告。
 金出武雄于1974年获得东京大学电子工学博士学位,是第一批计算机视觉的研究者,然后在1980年前往美国翻开学术生涯的新篇章,从担任卡耐基·梅隆大学机器人研究所高级研究员起,在该研究所担任过副教授、教授,并于1992年到2001年期间升任所长,奠定了卡耐基·梅隆大学机器人研究所的江湖地位。作为计算机视觉领域神一样的存在,以他的名字命名并得到广泛应用的技术很轻松就能找到。
金出武雄于1974年获得东京大学电子工学博士学位,是第一批计算机视觉的研究者,然后在1980年前往美国翻开学术生涯的新篇章,从担任卡耐基·梅隆大学机器人研究所高级研究员起,在该研究所担任过副教授、教授,并于1992年到2001年期间升任所长,奠定了卡耐基·梅隆大学机器人研究所的江湖地位。作为计算机视觉领域神一样的存在,以他的名字命名并得到广泛应用的技术很轻松就能找到。
他究竟带来了哪些干货?以下为金出武雄教授现场演讲原文(有删减):
今天我要给大家讲的主题是在实际户外场景中能够应用的机器人系统,为什么要讲这个主题呢?因为我觉得智能不光是用来玩游戏和信息处理,实际上真正的智能应该是在真实的环境下跟人类进行互动,我们应该有这样的智能机器人系统。
最近的研究:雨天如何避免雨滴对车灯的反光
在晚上开车的时候,空中下落的雨滴会被车灯照亮,阻挡我们的视野。为什么它会成为遮挡视线的障碍物呢?原因是这样的:车灯在发光的时候,打到了雨滴上面,这时候雨滴变成了一个迷你镜头,光会在里面折射,雨滴看起来就是亮的。要成功阻挡雨滴对我们的遮挡要怎么做呢?如果把车灯换成投射仪,在雨滴在降落的过程中不照射,只照亮没有雨滴的地方,雨滴就变成了透明的,就不会影响到车灯的视觉效果,因为它没有产生光的折射。
这个场景怎么变成现实?实际上操作起来比较简单,因为雨滴的降低过程并不是快速的跌落,一般情况下速度是每秒10米。在计算机视觉或者是照相机看来,他们会把雨滴看成一个一个的物体,通过计算机捕捉雨滴,更直接更快。同时,照相机和投影仪不光能够接收灯光和光线,在灯光不足的情况下还会产生闪光,这样就提高了捕捉雨滴时的质量和亮度。

如果对雨滴拍照,就能够在视线范围内看到哪些雨滴在什么地方,只要看到雨滴的位置,就能对相应雨滴投射出来的光线进行控制,这些雨滴就不会阻挡我们的视线。在真实的场景中雨滴会比我们看到的时候下沉了一些,因为相对照片中的位置它已经发生了位移。根据雨滴的下降后的位置,最终决定在哪些区域投射光线,这样就可以不会直接在雨滴中折射。
应该怎么做?准备好一个投影仪和一个摄像机,进行同步的拍摄,用电脑对整个流程进行介入,我们用的就是会议当中的投影仪,需要对其进行相应的改造。现在大部分都是使用DLP的投影仪,他们用比较小的镜面的序列,每秒可以投射200帧图像,照亮的速度就可以与雨滴下落的速度相对应。

用投影仪代替试验当中的大灯,在前面放一个摄像机,将他们放到一个透明的盒子里面,放在车的大前盖上,这样就有了一个全新的智能大灯。当开始下雨时,有了智能大灯,你看不到雨滴,因为这个智能大灯可以有效的避免射线直接投射到雨滴上,对你的视线产生相应的影响。下雪和下雨类似,影像也会清晰很多,我们可以看到视线清晰率的明显提升。

这种智能大灯可以用于很多场景。有了智能大灯,会直接关闭掉投射到对方驾驶员眼球上的射线,这样就不会出现眩光情况,也不用进行远光灯和近光灯的调整,不会影响到后面行驶的车辆。目前很多自动驾驶的系统都可以直接检测到周围的人行道或者自行车,这种监测反应比人更快,一旦系统监测到行人或自行车,智能大灯就可以向这些行人或者自行车投射更多的灯光,让你可以清楚看到旁边有人,不要开车撞到别人。这样的应用很有意思,看上去是一个创新。
现在有了增强现实,在手机的使用过程中,你可以从不同的角度使用增强现实技术。比如说去年的Poke-monGO游戏,或者通过增强现实技术可以看到你面前的大楼的信息,这到底是不是真正的增强现实呢?我觉得并非如此,如果把手机拿掉,我根本看不到这个游戏,也看不到这个大楼。得到增强的不是现实本身,而是对现实的显示。
将机器人应用于户外场景的一些研究
机器人可以使用在户外场景中,例如做道路的勘探或监测。从1980年开始,我们就已经在进行户外机器人的研究了。当时我们把大量机器人放到要求非常高的活动当中去完成任务。
一般情况下他们都是在很危险的环境下来进行工作的。80年代的时候,我们将一个机器人派去3M岛的核电站,在核泄漏地区做环境监测。另外,我们还有机器人在活火山口进行调查,这种环境对于人类来说是上不去的。同时,我们还利用机器人做极地研究,帮助我们很好了解到极地的地况。我们现在也通过机器人帮助挖矿,同时进行户外开矿。现在的机器人卡车在没有任何人的干预下就能自动驾驶和使用,事实上这是上个世纪就完成的,也是自动驾驶的雏形。因为周围环境没有人,所以这种自动驾驶对安全性的要求比较低。与此同时我们还有自动收割系统,机器可以帮助我们实现青蒿叶的收集,实现大概600英里的全天候作业,一次性收集200公顷以上的青蒿叶。

我们在80年代中期就开始做了很多关于自动驾驶的测试,我们做了一系列Navlab汽车,在美国的无人驾驶大赛上,Navlab5号自动驾驶了三千英里,它98.2%由电脑控制,而不是100%由电脑控制。当自动驾驶不是100%由电脑控制时,这很危险。从案例中可以看到,有个人得一直在驾驶座上,但是这个人是把手举起来,由电脑来控制方向盘。当他看到前方有危险,赶紧握住方向盘来自己操作,因此有时开自动驾驶车甚至比你自己开车还要累很多,因为你要随时注意路况。我的同事在2007年也做了一个试验,是100%的自动驾驶,在驾驶员的位置上没有坐人,他们全部用了电脑的程序来控制汽车的驾驶。
在我看来从技术方面已经证明了无人驾驶是可能的,但在当时来看整个世界并不认为我们可以去进行人工不干预的自动驾驶。在过去的20多年,世界逐渐开始接受这个技术,今天自动驾驶技术也迎来成熟和爆发。在路面测试的自动驾驶或者是挖矿等其他环境下的自动驾驶原理都是一样的。

我们在90年代还做过一些关于飞行器的试验,当时用直升飞机可以100%进行自主飞行和无人驾驶,而且可以从空中做一些动作,比如抓取动作。我们在一定的地理范围内,把其中一个物品用蓝色去标记,利用计算机视觉技术进行搜索,自动检测出物体在什么地方,降低飞行高度以及调整移动方向来对物体进行抓取,整个过程全部是通过无人驾驶和无人干预进行的。现在这个技术变得更加先进了。

还有一个案例,在2000年我的学生接受采访说他发明了可以无人驾驶的小飞行器。飞行器里没有人类驾驶员,完全是由机器人和智能系统以及电脑控制。如果一大群类似的直升飞机飞过一个特定的区域,我们就能够在这个特定区域里进行勘探和研究。
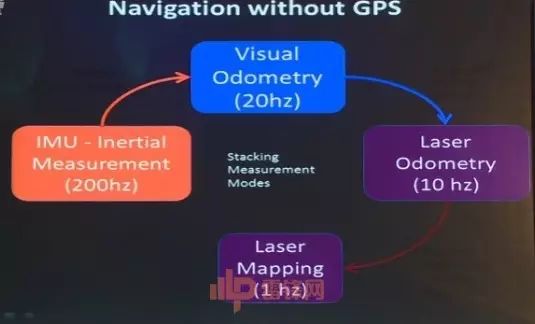
以上都是过去我们关于无人机和无人驾驶的试验,今天的试验成熟度和复杂度都提高了。现在的应用中GPS极大的帮助我们进行无人机驾驶,但有的时候在森林、地下或是比较颠簸的环境中,GPS的效果就不是那么好。

我有个做导航系统的同事,他是用IMU的系统,用计算机来抓取图像,来控制物体的飞行和移动速度,另外他们还装了激光设备,用这种新的导航系统来帮助探测物体的位置、移动和动态,并且能够根据传回来的数据创造出一个3D实景图。一旦描绘出实景图,就可以在图上做很多有趣的动作。比如我的同事在草地上进行奔跑,跳来跳去,可以看到他的整个行动路径全部被记录下来了,而且进行了3D还原。在15年或者20多年前这种技术还是非常先进和前沿的。
另外,还有在飞行过程中就能自动进行绘图的飞行器,不光是在户外,在建筑物之下也能飞行。它可以降低高度,穿过建筑物和屋顶,在其下面飞行,也可以在比较模糊的环境中飞行。整个飞行路径全部是无人驾驶的。
现在的无人驾驶技术已经变得越来越有应用空间,甚至能够应用于地下。在地下GPS的导航系统一般是没有办法工作的,我们就需要在这些飞行器或者无人机上安装传感器来进行定位,把无人机用于地下矿区进行勘探,对地下矿区情形做3D绘图在今天已经变得很成熟,技术成本也变得越来越低。

再举个例子,大多数的无人机或者飞行器的任务是进行导航,但是在真实的农业场景和应用中,除了导航还要对整个植物的生长情况做勘探,例如长得好不好,有没有害虫,是不是已经成熟了。我们不仅想让无人机看到这些植物,也希望能提取出关于植物细节的参数来,对植物的成长状态进行分析。由人去采集这些信息的时候,不可避免的会对植物造成影响,而智能系统在抓取信息时不会损害农作物本身种植的情况。除此之外我们还可以看到果实的筛选、包装和运输等流程。这个智能系统能够帮助我们提升最终收益。
机器人研究促进城市发展
最后想介绍我们的国家工程中心,简称NREC,它座落在卡耐基梅隆大学内部,我们有一个机器人中心,专门针对于机器人研究和生产,这些机器人可以使用在实际生活中。在NREC的研究中,还有一个机器人生态系统,在跟很多世界知名公司进行合作,不断扩展机器人的研究。

90年代以前,匹兹堡是先进而且富有的工业化城市,但是大概在10——20年前,匹兹堡进入衰落时期。当时我们对国家研究中心的旧址进行了修缮,作为我们的研究中心。研究中心刚刚建立的时候,这个地方是高危地区,很多人跟我说天黑后不要去那儿,非常危险。现在周围都发生了变化,变得非常棒,当时的房子只要10万或者20万美元,但是现在的房价都到了上百万。可以看到机器人的研究真正能够帮助本地带来新的收入,建立更好的环境。优步也来到了匹兹堡,他们在本地雇佣了团队,建立了研发中心,在匹兹堡已经有了无人驾驶汽车。他们是从零开始的,两年时间就做到了这一点,现在他们和各个行业进行合作,实现优步的自动驾驶。
人工智能的未来发展:技术结合实际
户外机器人是非常有意思的事情,因为它把理论和实际紧密结合在一起,可以真正的实现多人多学科多方面的合作。就像在农业行业,我们要和农业的专家进行探讨才知道一些农业机器可不可以用。在全球环境里都是如此,我们要不断的推广、研发和测试,真正为社会带来变革和进步。

未来的发展在何处?从我个人角度来说,特别是在机器人的研发领域,现在我们应该去设想,不仅仅只是想机器人的机制、传感器或者算法,而要真正关注的是整个集成性的机制、应用和其他技术,如果没有办法想到未来的应用,是没有办法做好现有的研发的。我们要有整体系统,不断的研发和前进。我希望大家能够认同我的观点,一起携手创造能够真正为世界带来贡献的完全系统,这样我们的人工智能和人工智能系统才能够真正成功,不再只是一个口号。
(完)
更多精彩CCF-GAIR大会演讲,请继续关注 AI 科技评论后续报道。










