
大家好!今天来了解大容量水母机器人的水性电池——《The multifunctional use of an aqueous battery for a high capacity jellyfish robot》发表于《SCIENCE ADVANCES》。想象一下,在神秘的水下世界,水母机器人轻盈地游动,而这背后的关键就是它独特的水性电池。这个电池可不简单,它不仅为机器人提供动力,还巧妙地解决了传统电池在水下机器人应用中的诸多问题。接下来,让我们深入了解它的神奇之处。
*
本文只做阅读笔记分享
*
一、研究背景与创新点
(一)机器人能源现状与挑战
在机器人技术领域,续航能力一直是追求的关键目标。传统上,为了延长机器人的操作时间,通常需要增加电池容量。然而,这往往伴随着一系列问题。例如,当增大机器人尺寸以容纳更高容量的电池时,不仅会降低其架构设计的自由度,还会增加惯性。这就好比给一个运动员增加了过多的负重,使其行动变得迟缓,进而降低了机器人的效率、敏捷性,同时运输成本也会增加。而且,目前大多数机器人的能源系统功能较为单一,仅仅是为了提供能量给电子设备和电机。
(二)水母机器人的创新灵感
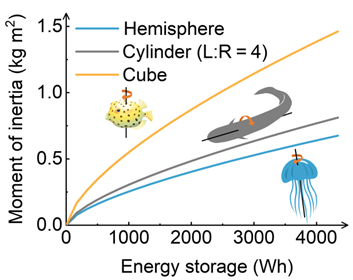
为了克服这些问题,研究人员从自然界中寻找灵感,水母便是一个绝佳的范例。水母主要由“中胶层”构成,这一结构不仅赋予了它身体弹性,使其在变形后能够恢复形状,还充当了内部骨架来支撑身体。更重要的是,水母能够多功能地利用能量,其“中胶层”中的含纤维蛋白微纤维可用于为肌肉提供动力,从而实现移动和进食。基于此,研究人员选择了水母形状来设计电池,旨在打造一种既高效又多功能的机器人电源系统。水母形状的钟形结构,相较于其他形状,能够存储大量的液态电解质,并且具有相对较低的惯性矩,这为提高机器人的性能奠定了基础。
二、实验设计与系统构成
(一)整体系统架构
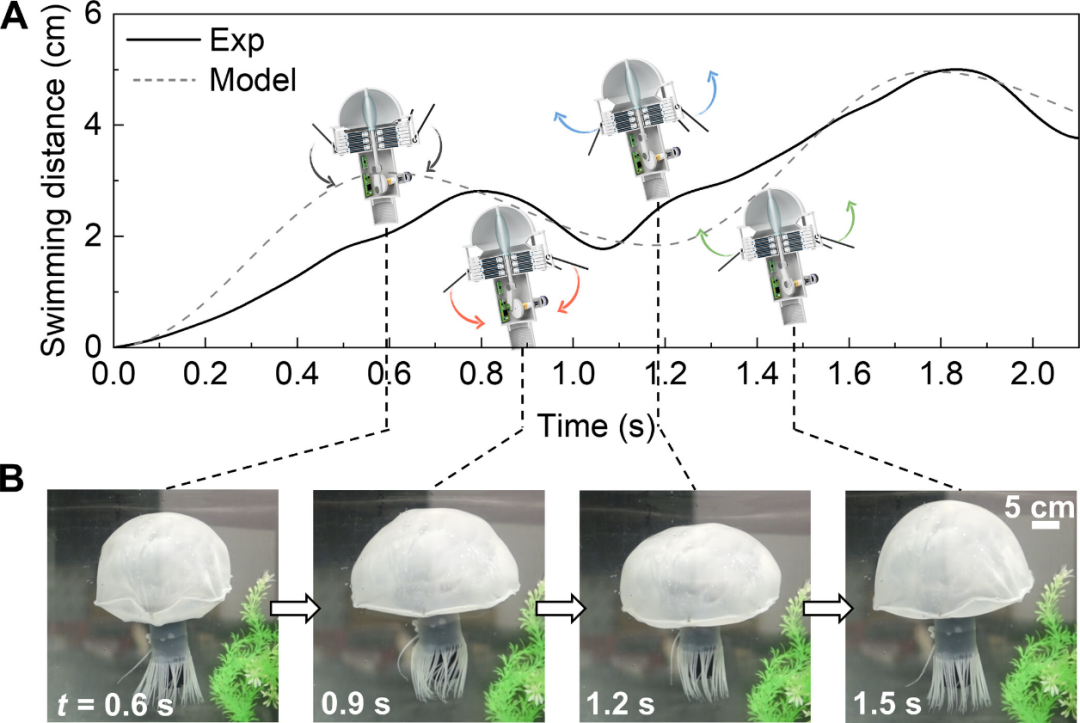
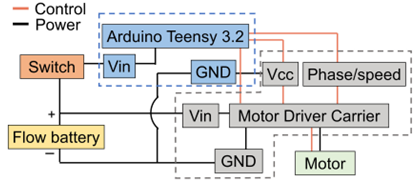
水母机器人的系统设计巧妙地融合了多个关键组件。在驱动方面,采用了氧化还原液流电池(RFB)堆作为电源系统,电机则充当了驱动系统的核心,而Teensy3.2微控制器负责整个系统的控制。这三个部分协同工作,如同机器人的“心脏”“肌肉”和“大脑”,共同驱动机器人运动。例如,RFB将化学能转化为电能,为电机提供动力,电机的转动带动曲轴,进而使中心杆上下运动,最终驱动连接在钟形罩内圆周的六个杠杆臂上下摆动,模拟出水母的推进方式。

(二)控制系统设计细节
控制系统在调节机器人运动方面起着至关重要的作用。RFB堆不仅为电机供电,还为Teensy3.2微控制器和电机驱动器载体提供电力。微控制器和电机驱动器相互配合,精确控制电机的转速,从而实现对机器人游泳速度的精准调节。在实际测试中,通过将电机占空比设置为100%,机器人能够达到最高的游泳速度。同时,为了确保机器人在水中的浮力平衡,3D打印的气缸室采用了特殊设计。其直径为6cm、高度为7cm,使用高模量聚氨酯(CarbonInc.; RPU70)材料制作,并与中空硅聚氨酯(Carbon3DInc.; SIL30)部件和中心杆相结合,形成了一个用于放置控制模块的空气空间。这一设计有效地增加了机器人的浮力,帮助抵消电解液(ρ~1.2 gml
-1
)与周围水(ρ~1 gml
-1
)之间的轻微密度差。此外,在机器人底部设计了外壳并添加额外重量,这不仅有助于维持机器人在水中的直立姿态,还能根据特定操作要求控制机器人的方向。
(三)电源系统设计要点
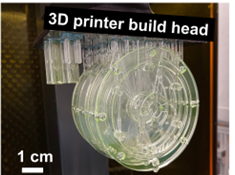
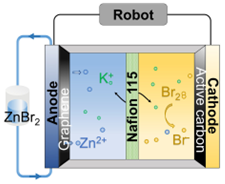
电源系统的设计紧密围绕机器人的需求展开。为了减轻机器人的重量,RFB电源系统采用了3D打印聚合物(CarbonInc.;LOCTITE 3D IND405 Clear)作为电池密封材料,使得机器人的总干重从传统不锈钢版本的2207g大幅降低至574g。整个RFB堆设计成圆柱体形状,直径为12cm,每个RFB单元的厚度为0.55cm,内部包含钛网电流收集器、碳毡电极、Nafion膜以及3D打印密封件等组件。U形通道的设计确保了所有阳极电解液(在ZnI₂电池中为阴极电解液)腔室相互连接,使电解液能够在ZnBr₂电池中顺畅流动。
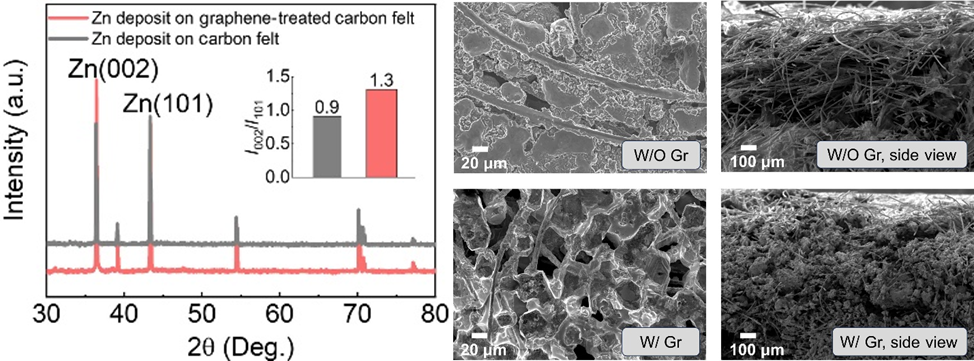
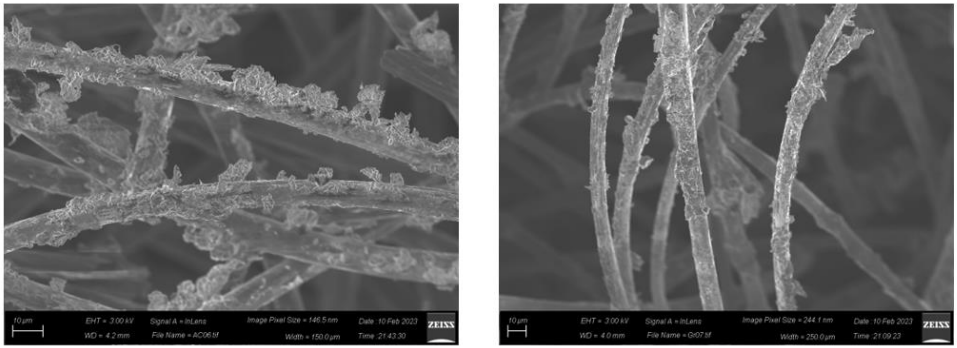
在解决RFB系统存在的问题上,研究人员采取了一系列创新措施。针对锌沉积可能导致电池短路的问题,利用石墨烯的特性,使其作为界面材料,引导锌电结晶沿着电流收集器平面的优选生长轴进行生长。XRD分析结果表明,与未处理的碳毡相比(I
002
/I
101
比例为0.9),石墨烯涂层电极上的锌生长更加有序,(002)晶面暴露更多(比例为1.3)。
在阴极侧,通过电喷雾活性炭来增加有效表面积,促进Br₂的吸附和电化学反应,从而有效限制了溴的交叉问题。
三、实验结果与性能分析
(一)ZnBr₂液流电池性能表现
1、电池结构与充放电原理
ZnBr₂液流电池因其较高的功率密度而被选作水母系统的动力源。单个ZnBr₂ RFB电池单元由阳极、阴极、电解液以及离子交换膜等多个部分组成。在充放电循环过程中,阳极和阴极分别发生特定的化学反应。阳极反应为Zn
2+
+ 2
e-
→ Zn,阴极反应为2Br
-
- 2e
-
→ Br
2
,电池整体的电位差为1.8V。
2、性能测试数据与分析
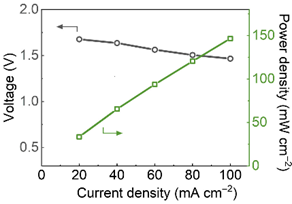
在电池性能测试中,为确保操作安全并避免Br₂在运行过程中释放,研究人员对电池结构进行了特殊设计,即将阴极电解液和阴极碳毡密封为固定电极,使其在RFB中无流动。这种设计使得ZnBr₂RFB在高达的电流密度下,能够展现出稳定的充电和放电平台,平均放电电压约为1.6V。
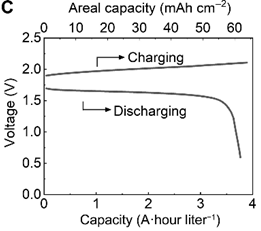
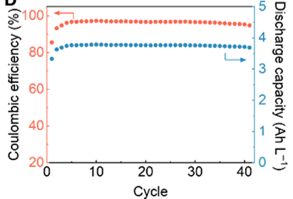
此外,经过改进的电池界面显著提高了循环稳定性,该电池在的电流密度和的容量下,能够稳定运行超过40个循环,并且始终保持稳定的放电平台。
在功率密度方面,当电流密度为时,ZnBr₂RFB的功率密度高达。然而,ZnBr₂液流电池也存在一些问题,其毒性和腐蚀性对环境和操作安全构成潜在威胁,并且阴极反应空间有限,这在一定程度上限制了电池的容量以及机器人的运行时间。
(二)ZnI₂液流电池性能特点
1、电池配置与工作模式切换
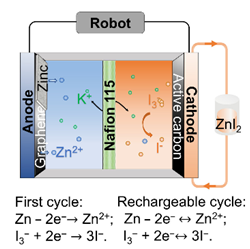
ZnI₂液流电池的配置与ZnBr₂类似,同样采用了石墨烯和活性炭修饰电极。但与ZnBr₂不同的是,I₂的安全性更高,这使得ZnI₂ RFB能够切换阴阳极电解液的流道,从而充分利用水母钟形罩更大的体积。在首次使用时,ZnI₂RFB作为原电池运行。具体操作是先在石墨烯涂层阳极电沉积120mA
・
hour cm
-2
的Zn,然后使用4MZnI
2
+1MKI+0.3MI
2
作为阴极电解液。在这个过程中,阳极发生反应Zn
– 2e- →
Zn
2+
,阴极发生反应I
3
-
+ 2e
-
→3I
-
。
2、不同阶段性能数据展示
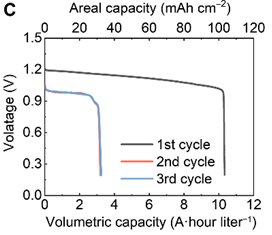
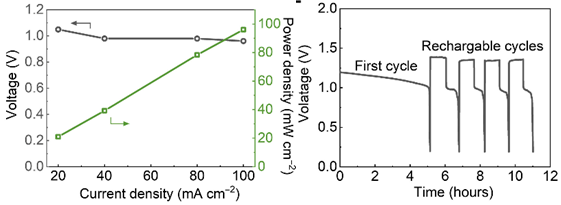
在原电池模式下,ZnI₂ RFB表现出出色的稳定性,在20 mA cm
-2
的电流密度下,能够持续稳定运行长达5小时。其能量密度约为11A
・
hour liter⁻¹,面积功率密度约为110 mA hour cm
-2
,放电深度达到约69%。然而,需要注意的是,放电深度受到碘侧的限制,因为随着放电过程的进行,I
3
-
离子浓度逐渐饱和,会在碳毡上沉积形成固体碘。由于固体碘是电绝缘体,这会导致过电位快速增加,进而使放电电压下降。
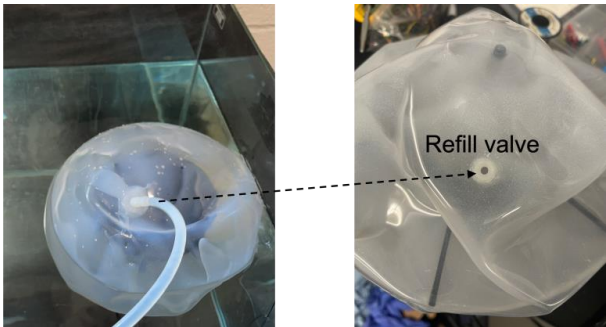
幸运的是,由于电沉积Zn的容量较高,可达300mA
・
hour cm
-2
,在首次放电后仍有剩余Zn。因此,通过打开钟形罩上的阀门更换耗尽的阴极电解液,机器人就能够继续运行。
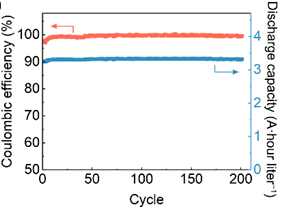
在可充电模式下,ZnI₂RFB的循环容量约为3A
・
hour liter⁻¹,并且在超过200个循环中都能保持稳定的性能。
在理论电压为1.2V时,ZnI₂RFB的最高功率密度约为100mW cm
-2
。在实际测试中,当ZnI₂ RFB在首次原电池循环后进行充电,在后续每个循环中,电池能够运行约30分钟。
(三)水母游泳性能评估
水母机器人的游泳性能是衡量整个系统成功与否的关键指标之一。水母的钟形罩能够存储多达4升的电解液,这为机器人的运动提供了必要的动力支持。为了实现游泳动作,机器人采用电机拉动钟形罩的方式。钟形罩由硅胶(Smooth-OnInc.;DragonSkin30)制成,其独特的半球形设计(直径为30cm)使得在一个完整的划水周期中,底部受到的阻力大于顶部,从而产生向上的推力,推动机器人向上游动。在为电机供电方面,使用了六个ZnBr₂ RFB电池组成电池堆,该电池堆能够输出9.6V、1.6A的电力,并且采用饱和浓度为15M的ZnBr₂溶液作为阴极电解液,以最大化电池的容量。当测量水母的游泳速度时,研究人员通过跟踪钟形罩顶部的位置变化来获取数据。实验结果表明,水母机器人能够达到2 cm s










