列数近年热门话题,5G、车联网和自动驾驶都在其中。然而,经过和这个行业的深度全方面接触,特别是和5GAA的主要车厂一直以来的双边合作,感觉这个话题还是有点众说纷纭,有必要拿来澄清和探讨下。
先介绍下5GAA: 华为、奥迪、宝马、戴姆勒、沃达丰、爱立信、英特尔、诺基亚、高通于2016年9月28日宣布结成了5G汽车联盟(5GAA)。各公司将在车联网通信解决方案的开发、测试、促进销售方面展开合作,并支持标准化,加快商用化和向全球市场推广。目前已涵盖主要车企、运营商与设备商成员40+。
再介绍下5G: 国际电信联盟(ITU)对5G的定义,5G网络是能提供20Gbps速率,时延1毫秒,每平方公里100万连接,网络稳定性99.999%的下一代蜂窝无线通讯网络。业内普遍预期5G将在2020年商用。
车联网V2X的名字很直观,就是把车连到网或者把车连成网,包括汽车对汽车(V2V)、汽车对基础设施(V2I)、汽车对互联网(V2N)和汽车对行人(V2P)。这个网里的服务可以说是五花八门,让人眼花缭乱,但从最终的客户来看,不外乎这三个:
以上服务于乘客和驾驶员的车联网业务,本质上就是传统的MBB业务,只不过就是车这个终端尺寸更大,电源更足,给了技术上发挥的空间,包括车上部署更多的天线实现高阶MIMO,提供更高的数据率,给车内提供高速互联网接入。
如果有人在车上做了个联网试验,就说是在搞车联网,那纯属误导。如果有人搞了个交通信号灯提示也说是车联网,你也别以偏概全,车联网的价值远大于此。
以下文字重点是对上面的第三个客户“车”的场景进行讨论。
说到车联网与自动驾驶的时候,需要强调的是,自动驾驶的核心是车,而不是网;如同物联网的核心是物,而不是网。
没有V2X,驾驶也能自动,但是没有V2X,无法真正的实现全场景自动驾驶。
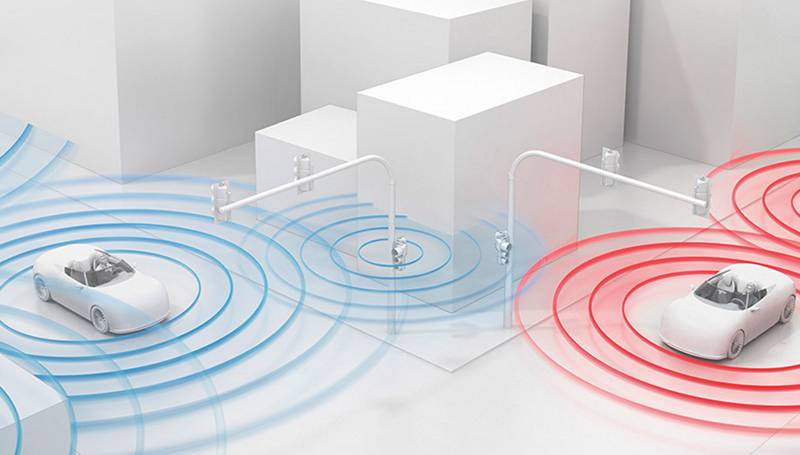
如当前的谷歌,特斯拉,Mobileye自动驾驶系统,基于传感器,雷达和摄像头的各种信息输入,通过人工智能技术决策,单车本身在一定程度上即可以自动驾驶。但是单车本身也有很大的局限性,在晚上、雨雪天,雾天等恶劣天气下,在交叉路口、拐弯处等场景,雷达、摄像头看不见,看不清,看不准。特斯拉曾发生过的一次致命事故,即为在强烈的日照条件下,自动驾驶未能识别卡车的白色车身,因此未能及时启动刹车系统所导致。针对这些场景开发性能更强的传感器,成本会高到消费者无法承受的地步。这就需要车联网里的V2X通信(V2N,V2,V2V,V2P),提供远超出当前传感器感知范围的信息。本质上可以把V2X视为一个拉长拉远的“传感器”,通过和周边车辆、道路、基础设施的通讯,获取比单车能得到的更多的信息,大大增强对周围环境的感知。5G网络本身具有的超大带宽超低时延特性,可以实时搜集传输更多更精确的环境信息,使用云化的计算能力用以车辆本身自动驾驶的决策。
认识到上面这一点就理解了,在实现车辆自动驾驶场景中,V2X是一个必要且增值的使能技术;换句话说,即便车辆本身就可以实现部分自动驾驶,通过车联网技术依然可以进一步提升性能,且可以降低单车部署传感器的成本,减少对高精度传感器的依赖。
同时据非官方数据,车企内部验证的结果是基于多车信息汇总的决策会比单车信息基础上的决策在可靠性上提高三个数量级。(注意这里并没有要求路上所有的车辆都拥有V2X功能,车流中的部分车辆进行信息共享即可在一定程度上提高单车与整体决策的可靠性)。这是V2X的又一重要价值所在。
所以在
未来很长一段时间,尽管路上会是V2X与非V2X车辆共存的局面,单车由V2X技术所带来的增益会随V2X车型渗透率提高的而逐步提升,从而正向驱动非V2X车辆的升级和替换。

如上文所述可知,由V2X使能的自动驾驶场景中,各种决策还是来自车辆本身。这一点决定了在车联网这个环境里车本身是个独立的决策主体,即使是车连上了网或者连成了网。这个结果是由两个事实决定的:
第一,车主不会希望将自己的安危交给其它车或者第三方决定。周边车提供的信息只是给本车做参考用。最终的决策还是在本车实现。周边车辆的指令信息,特别是类似于“前车指令后车刹车”等决策信息是不会被本车直接采信的,此类信息必须是经过几层过滤,和本车上传感器的信息对比以后才会由本车决定采纳或拒绝。
第二,从商业角度考虑,车厂之间是互为竞争关系的,而且会有意识的凸显不同品牌之间的差异性,自动驾驶的性能好坏也是体现差异性的特征之一。基于V2X的自动驾驶功能,对应的决策算法,硬件上比如天线数的差异性,都是体现品牌优越性的手段。所以车厂不会愿意把决策机制和算法分布到不同厂家的车上,甚至不愿意分布到自己高端和低端品牌的车上。
因此V2X之于自动驾驶,需要传递和交互的不会是最终抉择指令,只会是是
周边车辆与环境的状态信息
。例如在超车等场景下需要周边车辆的传感器信息共享,并道等场景下需要周边车辆驾驶操作状态信息分享。这也符合前面所述V2X之于自动驾驶是一种“拉长”的传感器的定位。
本质上无论哪种应用场景,需要V2X传递的信息其实就是这两种:
传感器信息共享与周边车辆驾驶操作状态信息分享。可以说,所有的V2X自动驾驶消息都是这两种信息的不同表达形式。
另外,自动驾驶的单车决策模式也可以导出另外一个事实:
V2X的通信模式会以多播广播通信模式为主,以此更高效的分享周边的信息,而不是传统意义上的基于应答确认式的单播点对点通信方式(unicast)。
3GPP定义了若干个1毫秒到几个毫秒的低时延场景,主要集中在自动驾驶上。自动驾驶中制动等反应时间,是个系统响应时间,其中包括了给网络云端计算处理、车间协商处理的时间,也包括了车辆本身系统计算及制动处理时间。如果要做到100km制动距离不超过30cm,那么系统整体响应时间不能超过10毫秒,而人类最好的F1车手的反应时间在100毫秒左右。从保障安全的角度,系统响应时间当然越低越好,其中对通讯时延的要求会更高。未来5G网络能够在提供99.999%稳定性的同时做到小于1毫秒的通讯时延,则自动驾驶车辆的低时延场景更需要系统其它环节的配合来实现。





