仅供个人学习使用,模型TensorRT部署之前的前处理和后处理分析,python简单实现。
路面分割模型
查看模型onnx文件,获得模型的输入输出维度:
输入维度:[1,3,512,896]
输出维度:[1,512,896,4]
模型是一个全卷积网络,输入和输出大小相同,不管模型多么复杂,先分析前处理和后处理,先用python实现。
预处理:标准化->cv2.resize()->维度切片->astype(np.float32)
源代码是直接使用的BGR格式,也不需要仿射变换。

车道线检测模型
输入维度:[1, 3, 288, 800]
输出维度:[1, 201, 18, 4]
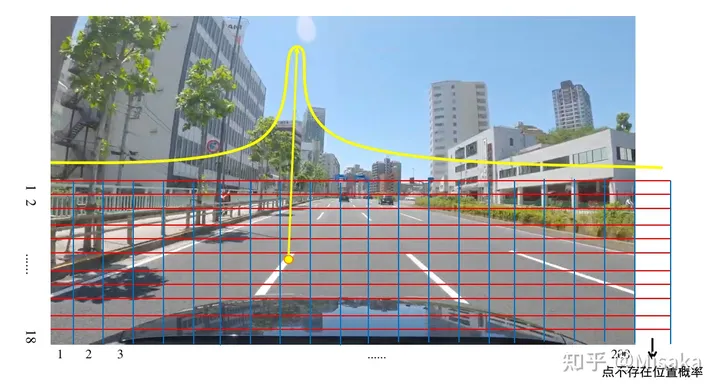
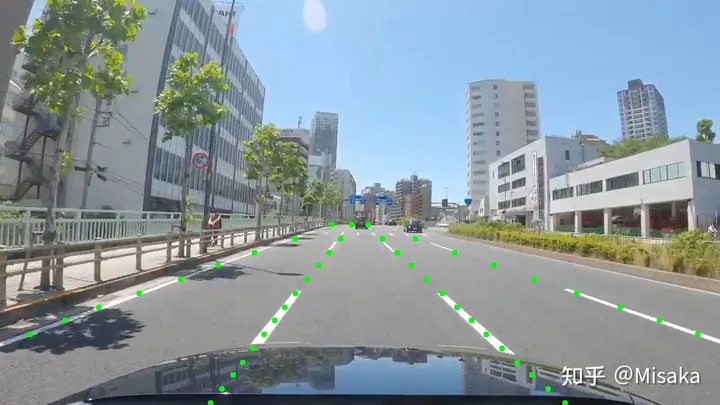
用到的算法是Ultra-Fast-Lane-Detection,和熟悉的yolo系列检测算法还不太一样,Ultra-Fast-Lane-Detection是基于位置概率实现的。首先将连续的车道线离散成点,通过若干个点去表示车道线,因此问题转化为预测点的坐标,根据先验车道线肯定在路面上,而且在图片的下半部分,那么预先在图像高度方向上划分出若干条线,例如该模型是预先在高度方向上画18条线,即每条车道线会由18个点表示,并且18个点的y坐标已经确定好了,因此预测点(x, y)坐标转化成了只需要预测x坐标问题。
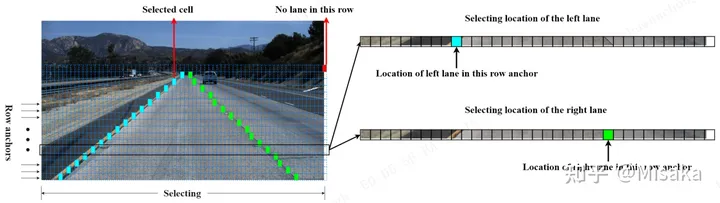
然后通过位置概率获得x坐标值,大概可以理解为:按图像的宽度方向,把图像分为若干个位置,比如该模型是把图像宽度分成了200个位置,再加上一个点不在图像上位置,那么总共就是201个位置,每个位置模型会输出一个位置概率,即表示点落在该区域的概率,因此模型输出维度[1, 201, 18, 4],可以理解为:201个位置概率(宽度方向格子数),一条车道线由18个点表示(y轴方向上的划线数),4表示业务场景只存在4条车道线。

预处理步骤:
cv2.resize(image, (288, 800)),这里注意的是直接resize,刚开始以为是裁剪图像,只保留图像的下半部分,发现输出结果不对。
BGR->RGB
标准化并转化为np.float32
维度切片:(1, height, width, 3)->(1, 3, height, width)
后处理步骤:
模型输出的维度其实是:(1, 1, 201, 18, 4)
对201维度进行softmax(),得到位置概率
位置概率和位置编号点乘,之后求和得到
,
维度为(18, 4)
判断位置概率
最大的位置是否是200,如果是,将
中对应索引元素置为0。
后处理可以直接写进onnx,可以省略C++代码编写量。
深度估计
输入维度:[1,3,256,512]
输出有六个,估计是全卷积网络反卷积过程的每个阶段都输出了,使用时取最后一个就好了,维度为[1, 1,256,512]
预处理:cv2.resize()->(BGR->RGB)->标准化->维度切片和np.float32
后处理:源代码中有个裁剪操作,把图像上面的18%裁剪掉了,并且对输出结果out*(-5)+255,便于可视化。

import cv2
import numpy as np
import onnxruntime
import matplotlib.pyplot as plt
import scipy
'''
预处理和后处理步骤:
1:路面分割
预处理:
标准化:normalize=(image-mean)*norm
输入图像尺寸:不需要仿射变换,直接resize,512*896
输入图像格式:BGR
np.float32
输出图像通道:4通道
2:车道线检测
预处理:
cv.resize
标准化
BGR->RGB
np.float32
输出维度:1*1*201*18*4,201表示位置,18表示车道线由18个点表示,4表示有4根车道线
后处理:
201维度:softmax
点乘相加
200位置点 out_j置0
3:深度估计
输入[1,3,256,512]
输出有6个,估计是全卷积网络反卷积过程的每个阶段都输出了
使用时取最后一个就好
前处理:
resize()
BGR->RGB
标准化
切片和np.float32
后处理:
裁剪
out *(-5)+ 255
'''
#路面分割
def loadSegment(onnxFile, imgFile, size):
width, height = size
oriImg = cv2.imread(imgFile)
image = cv2.resize(oriImg, size).astype(np.float32)
#ascontiguousarray()内存不连续的数组,变为连续的数组,加快运行速度
imgTensor = np.ascontiguousarray(image.transpose(2,0,1).reshape(-1,3,height, width))
sess = onnxruntime.InferenceSession(
onnxFile,
providers=["CPUExecutionProvider"]
)
input_name = sess.get_inputs()[0].name
output = sess.run(None, {input_name: imgTensor})
out = output[0][0].transpose(2,0,1)
cv2.imwrite("segment.jpg", out[0]*255)
#车道线检测
def UltraFastLaneDetection(onnxFile, imgFile, size):
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
width, height = size
oriImg = cv2.imread(imgFile)
# image = oriImg[-288:, :, :]










