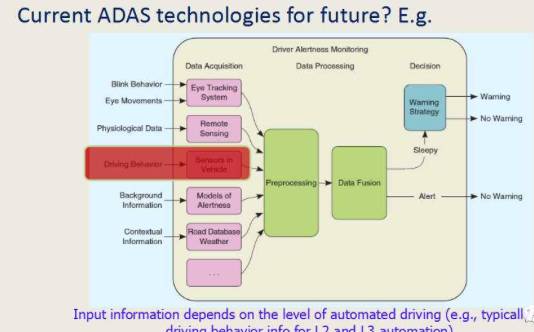
对于现有的ADAS技术,因为驾驶员始终处于驾驶控制回路中,驾驶辅助系统通过传感器采集驾驶员操作行为,提供相应的辅助措施。然而到了二级、三级自动驾驶,部分工况下车辆可以自主行驶,驾驶员一旦离开了控制回路,没有了对方向盘、踏板的直接操作,现有的许多ADAS算法就不再适用。那么针对未来高级自动驾驶技术的ADAS系统及算法就需要新的考量与设计。
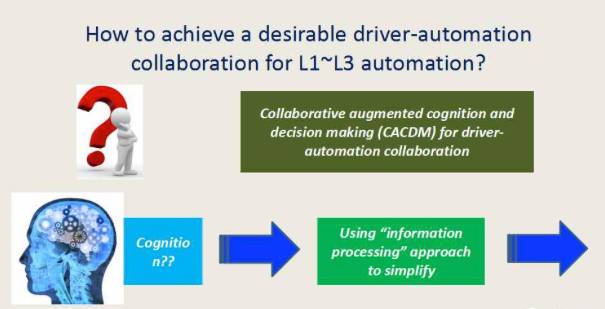
针对L1-L3自动驾驶,因为仍然有人类驾驶员的参与,那么思考的主要问题是应该如何实现理想的人车协同、人机共驾?这里,曹博士团队针对人车协同提出了一套“协同增强认知与决策Collaborative augmented cognition and decision making(CACDM)”的理论体系框架。采用的“information processing”方法来对驾驶员的认知情况进行简化,以适用于车辆工程的实际应用。
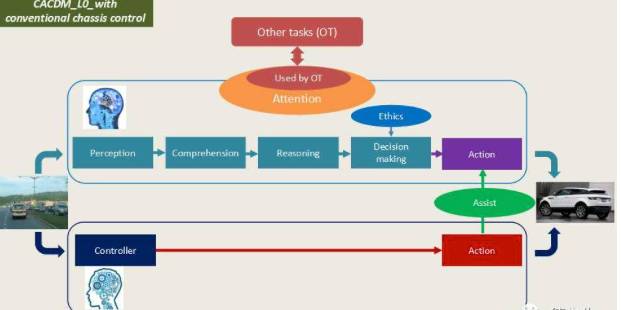
传统非自动驾驶车辆在没有底盘动力学控制系统干预下,完全由驾驶员实现对周围环境的感知、驾驶任务决策以及对车辆的实际控制。驾驶员注意力集中在驾驶任务中。
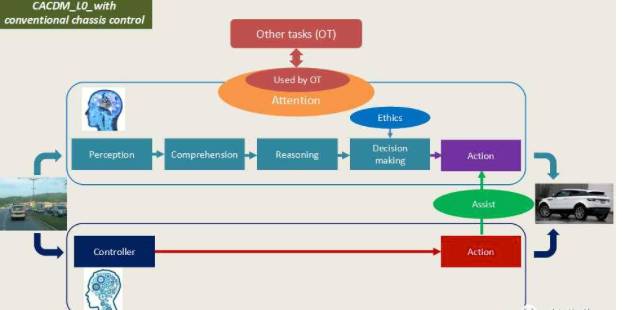
对于带有底盘动力学控制系统的传统车辆,车辆控制器一定程度上也会介入车辆状态的干预。此时驾驶员注意力仍然集中在驾驶任务中。
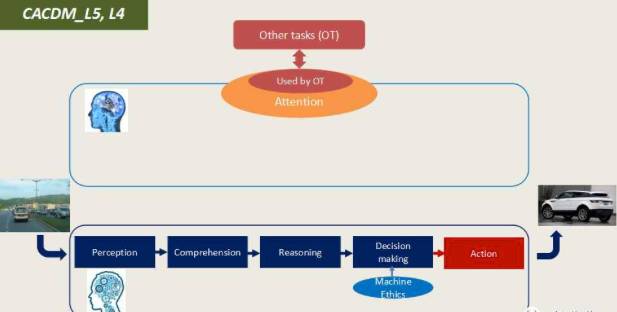
对于四级、五级自动驾驶车辆,驾驶员可以完全脱离对车辆的控制,由自动驾驶系统实现车辆的感知、决策、规划及控制任务。这是驾驶员的注意力可以解放出来,去执行一些非驾驶任务。
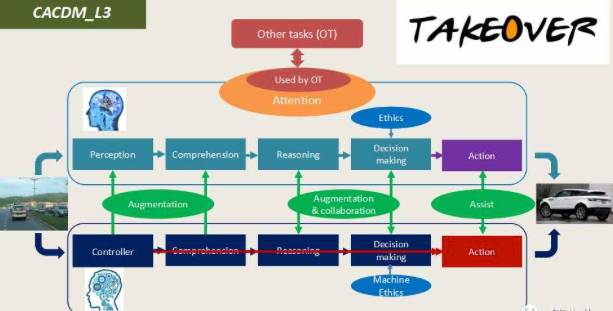
而对于L3 三级自动驾驶,情况则是最复杂的。常规情况下,车辆自主驾驶,驾驶员可以做些别的事情,注意力被非驾驶任务占据。而当遇到车辆控制器无法处理的情况,需要人类接管时,通过接管信号令驾驶员的注意力从非驾驶任务中退出,重新回到驾驶任务,实现感知、决策直至人工驾驶。与此同时,车辆控制器也由自主驾驶退回到传统的底盘动力学控制。可以看到L3自动驾驶中,车辆控制权限的交接是具备一定时间尺度的过程。并且人类在车辆完全自主驾驶情况下,他的注意力被不同非驾驶任务的占用情况也是千差万别,例如他可以看窗外风景、可以玩游戏、可以看手机发邮件、甚至是打盹睡觉,因此如何设置接管信号以保障交接过程的安全、平顺,包括信号的类型、强弱,都需要进行深入研究及验证。
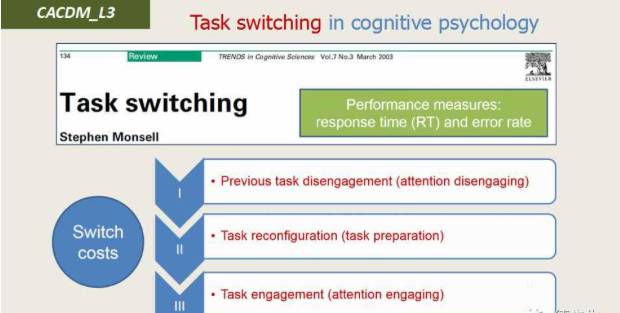
在认知心理学领域针对人类任务的切换与表现评价已有深入的研究,任务切换过程大致可分为三个步骤:前序任务的退出、新任务重构、及任务的占用,这三个步骤也依次对应人类注意力的变化。
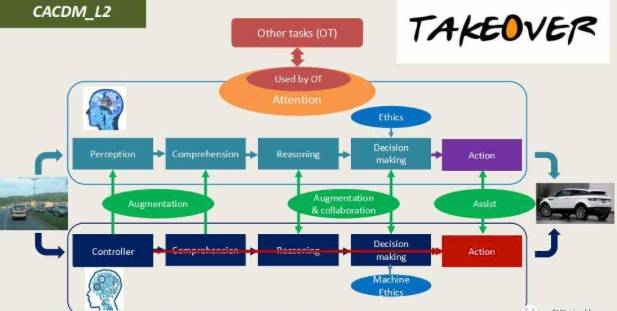
依据相关理论,针对不同级别的自动驾驶技术,曹博士在报告中指出了相应的人机共驾、权限交接的方法。针对L2 二级自动驾驶,驾驶员可在部分工况下不参与驾驶操作,但注意力必须时刻集中在驾驶任务。因此,曹博士团队提出了这样一种方案,通过机器对驾驶员的增强感知、人机协同推理与决策,进而实现人机共驾。
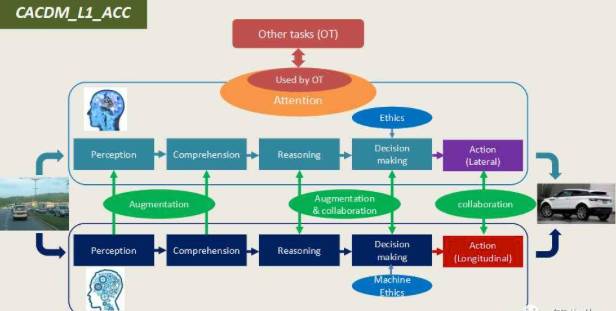
对于更低级别的自动驾驶,这里以L1自动驾驶中的ACC情景为例,也是通过机器对驾驶员进行增强感知、增强理解,进一步的,人机协同推理与决策,进而实现在车辆纵、横向综合控制层面的人机协同控制。
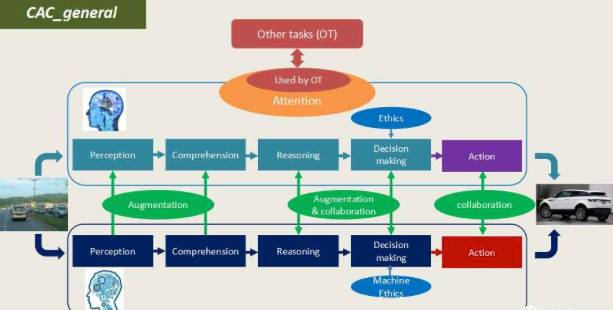
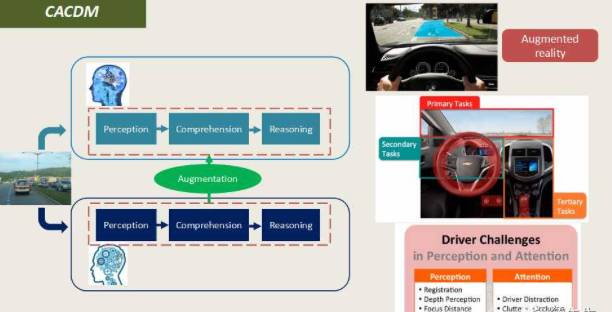
这里曹博士报告中提炼出一种具有普适性的“协同增强认知CAC”框架,针对自动驾驶,通过机器对驾驶员进行增强感知、增强理解,人机协同增强推理与决策,最终实人机共驾。
在这个理论框架下,可以针对工程化应用,进行一定程度的简化,即在感知、理解与推理阶段,通过机器智能对人类驾驶员进行增强辅助。
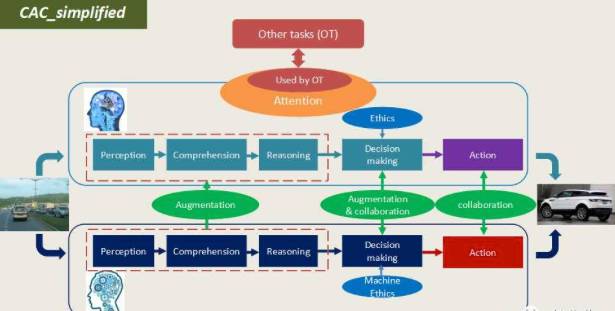
在感知、理解与推理阶段,因为人类无论是在感知还是在注意力方面,都有自身的局限性,例如人类视觉的物理极限、视觉的准确性、对色彩的敏感性,人类还会在开车时犯困、分心等等,所以可以通过增强现实AR等技术让机器智能对人进行增强辅助,提高人类驾驶的安全性、舒适性等。
目前曹博士团队在此方面也开展了相关研究。例如,了解驾驶员在开车转弯过程中,眼睛具体看的是道路什么位置,驾驶员视线远近对应其驾驶的意图、是否分心的状态。
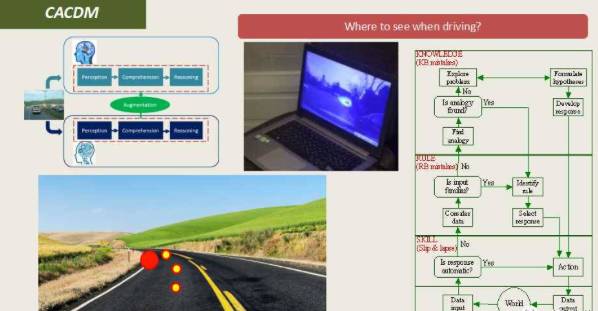
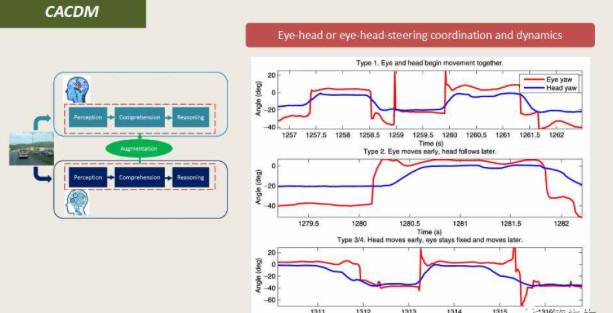
研究发现,人类驾驶过程中,人眼-头或者是眼-头-手的协同与动力学,与车辆的状态行为有着显著的相关性,换句话说,透过驾驶员的行为状态来推断、甚至预测他的认知心理状态以及车辆运动状态是可以实现的,这对自动驾驶技术以及产品的开发会大有帮助。
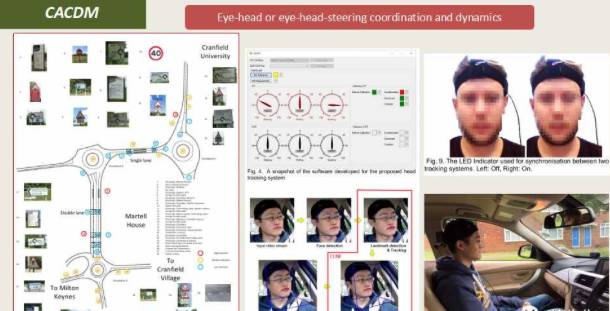
这页内容展示了曹博士团队的相关研究。他们在英国克兰菲尔德大学截取了校园中一块具有代表性的实际交通道路区域,开发了自己的高精度地图,包括直道、转向、roundabout环岛、减速带等等一系列典型驾驶场景,进行相关驾驶员实车道路实验,研究有限场景下近三十种交通指示牌对驾驶员驾驶意图、注意力状态的影响机制。此外他们还开发了基于摄像头、穿戴设备的驾驶员状态监测系统,可以监测驾驶员脸、头、眼的动力学信息。
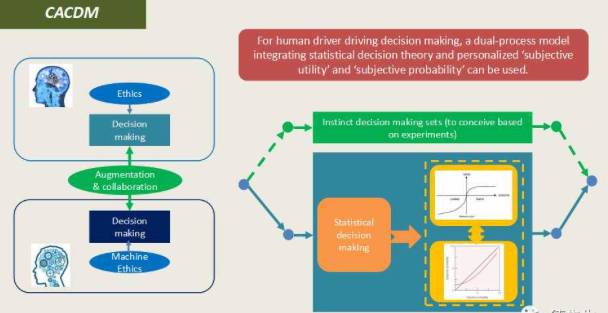
针对驾驶员协同决策,提出了一种基于统计决策理论和个性化客观分析的集成模型,来进行人机协同增强决策,效果也比较显著。
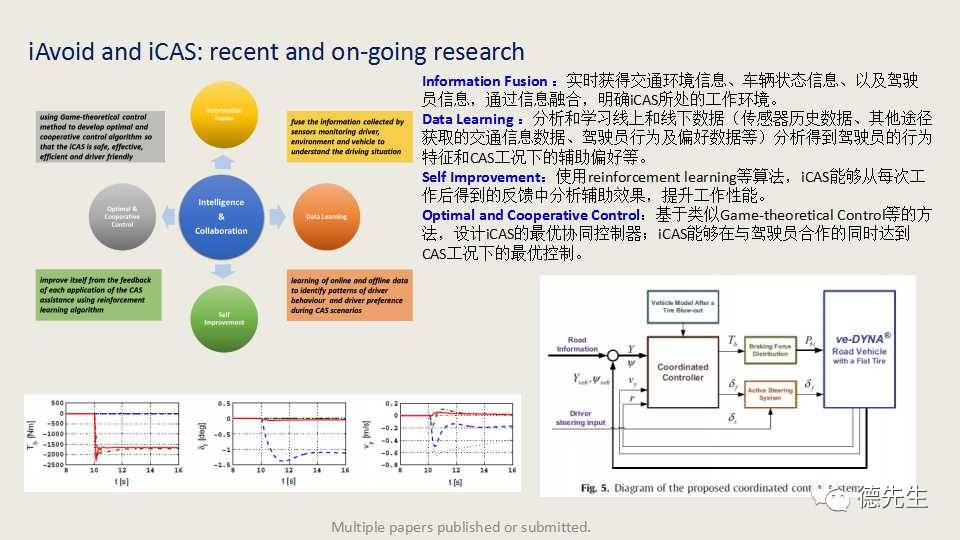
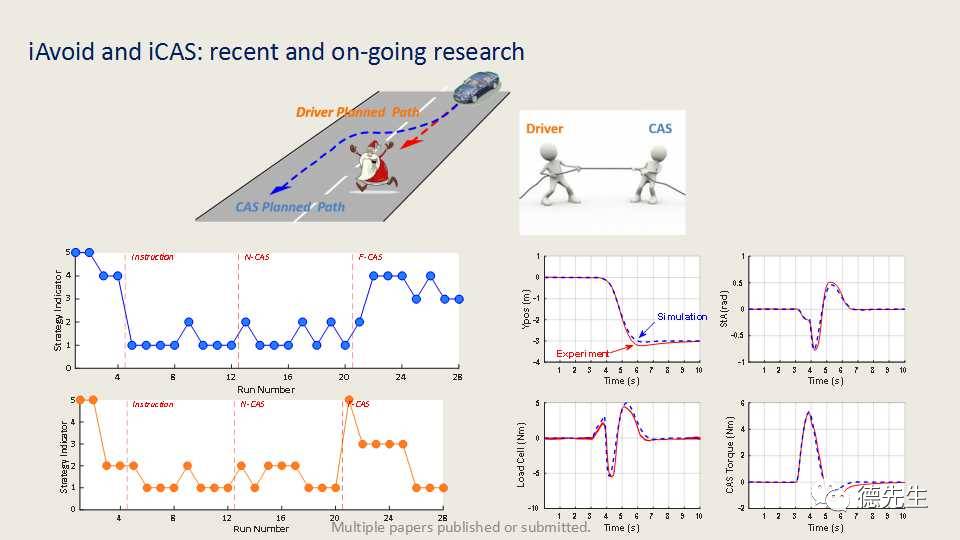
这一块内容,曹博士团队针对二级自动驾驶开发了4i安全智驾系统。iHorizon,是针对不同驾驶员驾驶风格,进行短期、长期车速预测,供车辆动力学控制以及能量管理使用;iAvoid,是基于车辆动力学状态针对车辆主动避撞能力的监控系统;iMind是针对二级自动驾驶驾驶员状态必须时刻集中在驾驶任务上这一硬性要求开发的驾驶员注意力状态监控系统;iCAS是针对避撞场景开发的智能人机共驾主动避撞算法。

针对L4、L5高级自动驾驶,也开发了相应的4i安全智驾系统。iHorizon、 iAvoid与刚才前面提到的功能类似。这里的iDecision是针对无人车的智能拟人驾驶自主决策算法;iPath,则是聚焦在路径规划,拟人自主驾驶路径规划算法。

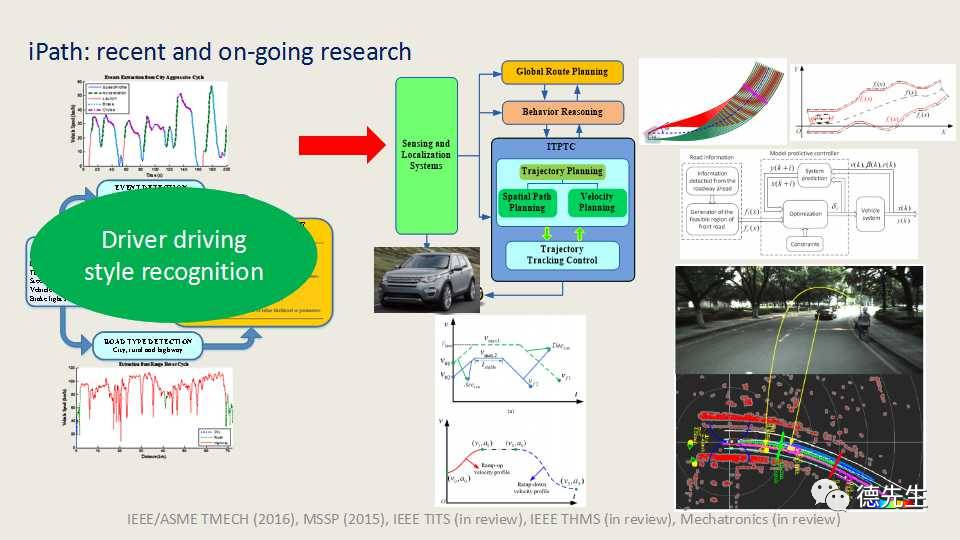
下面给大家简要展示一下上述4i智驾系统的相关研究成果与进展。这个是iPath 智能路径规划系统,针对不同驾驶风格首先进行识别,进而进行拟人化的路径规划,这一部分已经完成了实车数据采集与分析,正在系统仿真分析阶段。
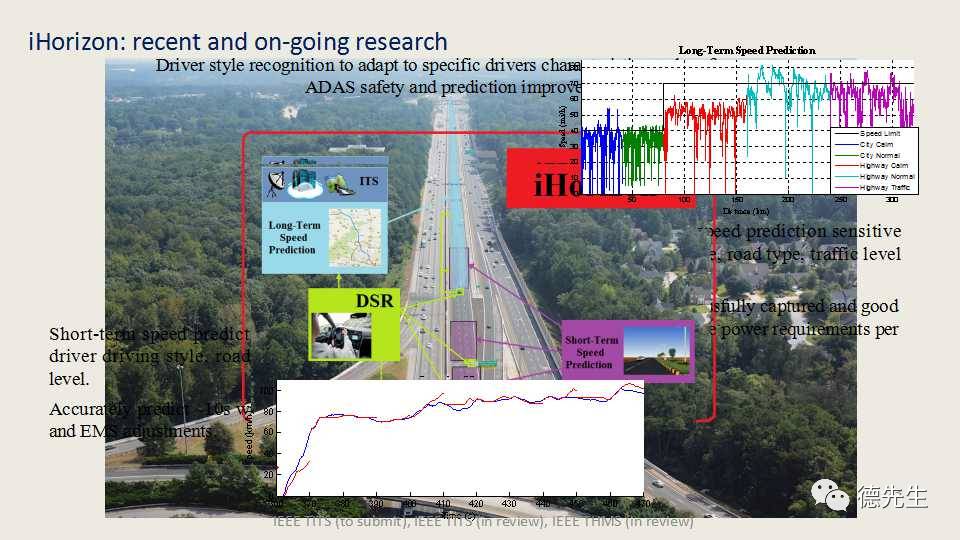
这里是iHorizon,对不同驾驶员驾驶风格进行识别,在此基础上进行短期、长期车速预测,进而对车辆动力学系统以及混合动力能量管理系统进行响应调节。
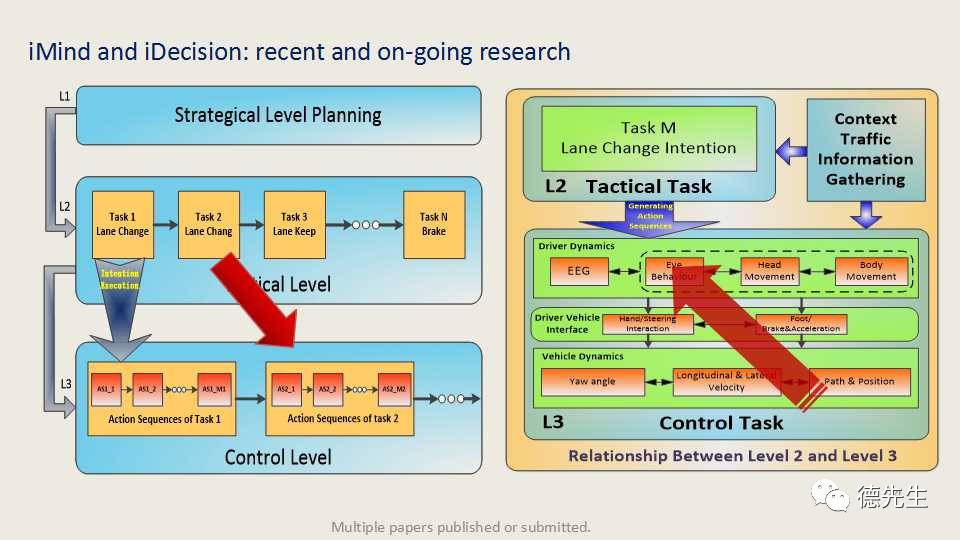
这里是针对iMind、iDecision系统提出的具体方法架构。
针对iAovid和iCAS系统,通过离线、在线输的综合分析学习,进一步采用增强学习的方法,实现了最优协同控制器的设计。
这一部分,曹博士团队的一个博士后,刚从剑桥大学博士毕业,也在采用博弈论在研究相关最优协同机制。
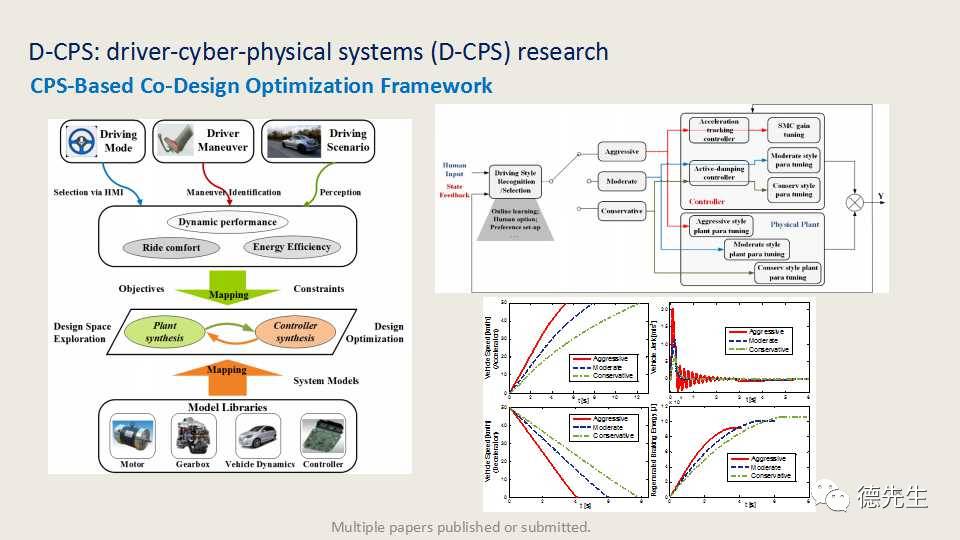
因为人-车-信息-环境构成一个闭环耦合系统,各部分相互影响,因此团队提出了Driver-CPS驾驶员-信息物理系统的概念,针对不同驾驶员驾驶风格,对智能电动车进行优化设计与控制。
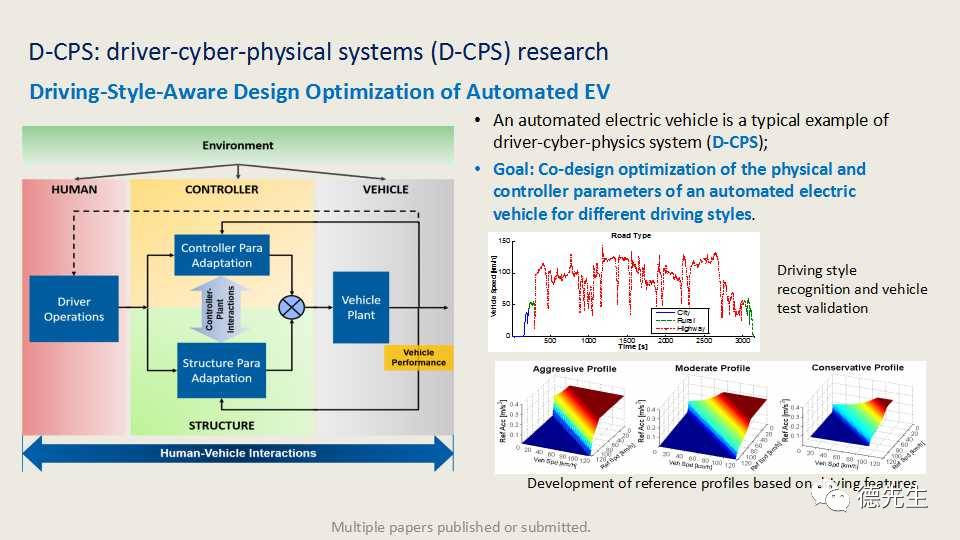
这是Driver-CPS驾驶员-信息物理系统协同设计优化的架构与方法。
针对人车协同,在传统底盘动力学控制架构的基础上,团队加入了驾驶员认知与状态观测的模块,形成了新的人车协同控制方法架构。
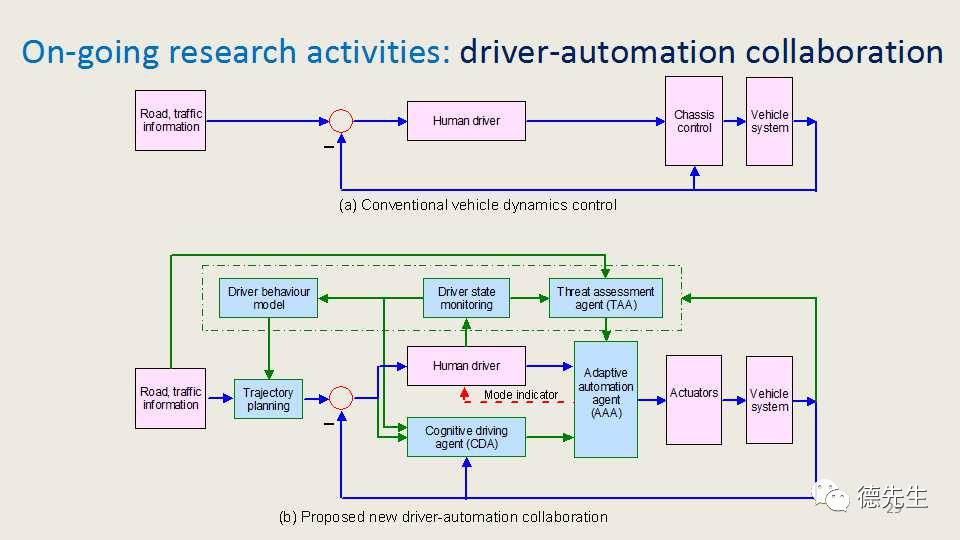
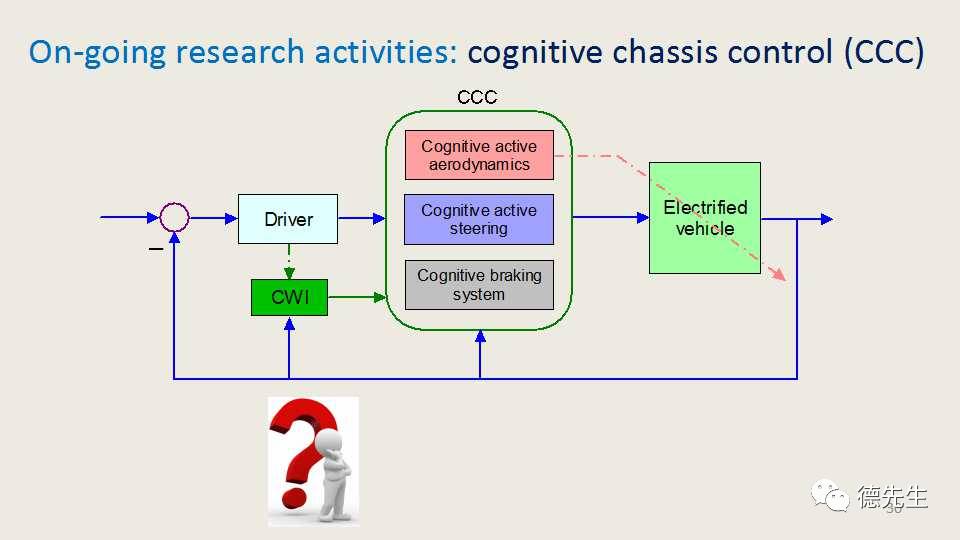
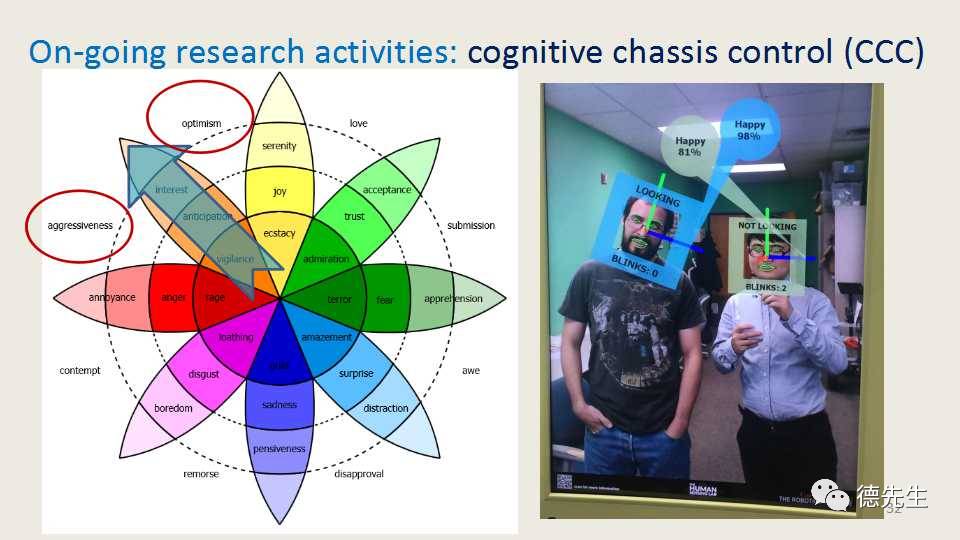
在这一新的架构体系之下,提出了认知底盘控制CCC的概念,通过对驾驶员状态的观测,对车辆空气动力学、主动转向、制动系统进行主动调节,提升了车辆综合性能。
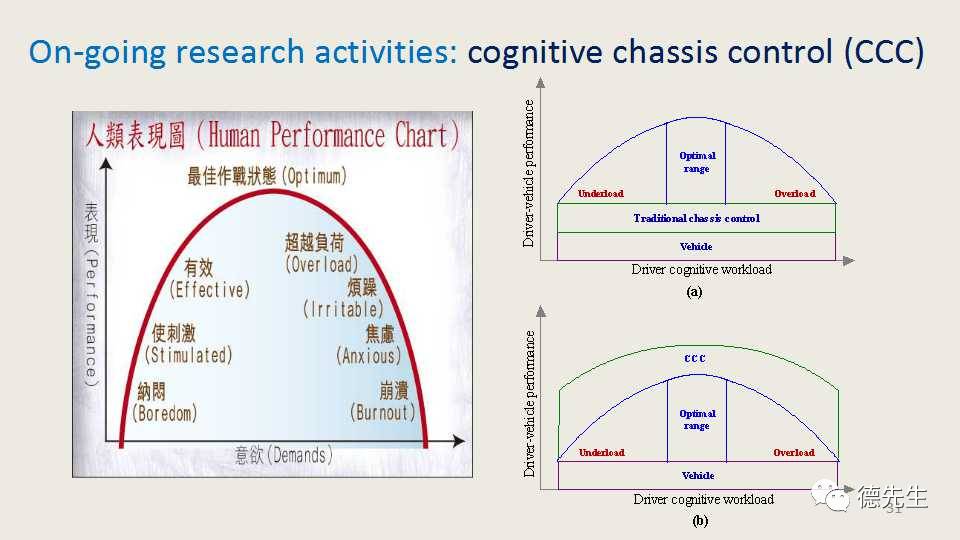
这一方法也是采用了认知心理学领域人类表现-大脑负荷的对应关系,进行控制器的设计。
这是曹博士在卡耐基梅隆大学机器人研究所访学时的照片。
下面给大家介绍一下自动驾驶“平行智能”方面的研究进展。
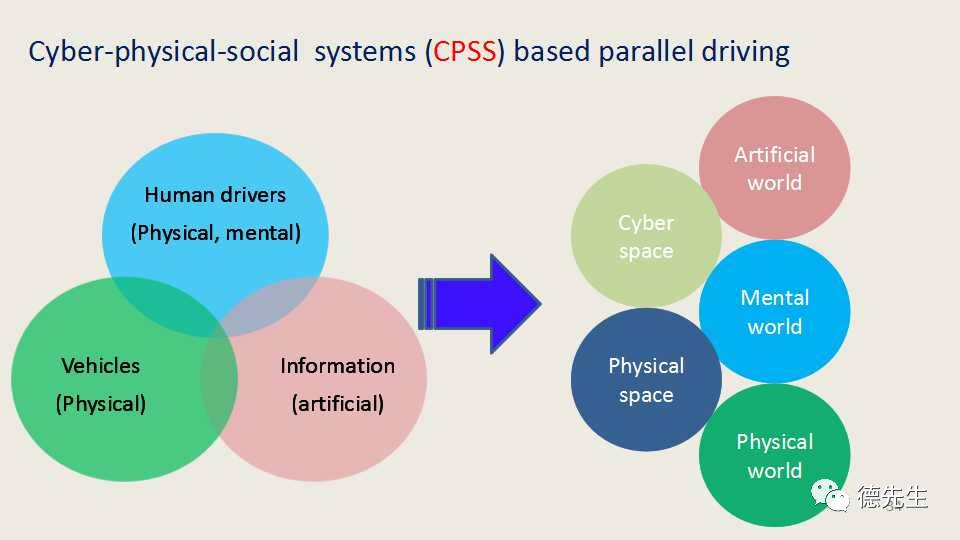
这一部分是在王飞跃老师提出的CPSS的理论框架下,团队将驾驶员、车辆、信息这几个组成部分,扩展对应到通过物理空间和信息空间耦合交互的三个世界:物理世界,精神世界和人工世界,形成了基于CPSS理论的平行驾驶方法。
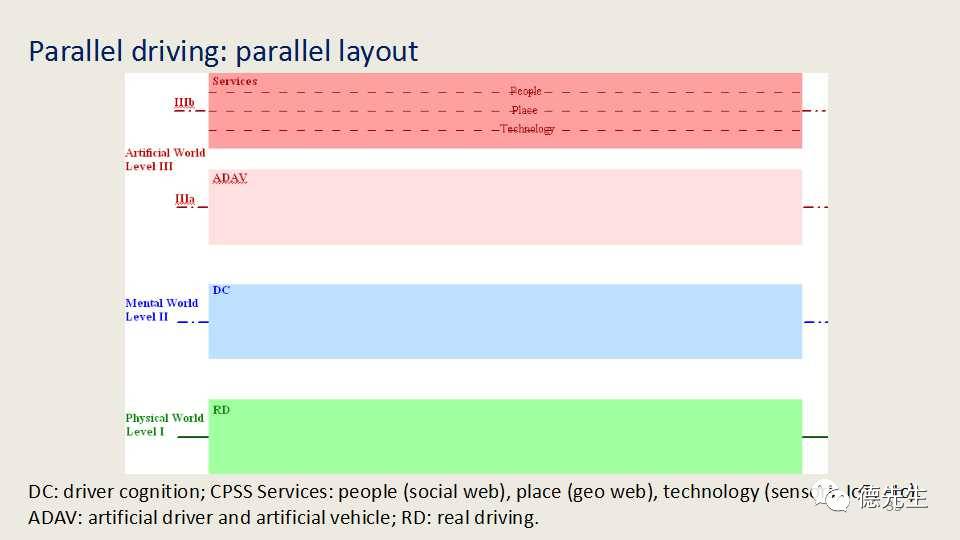
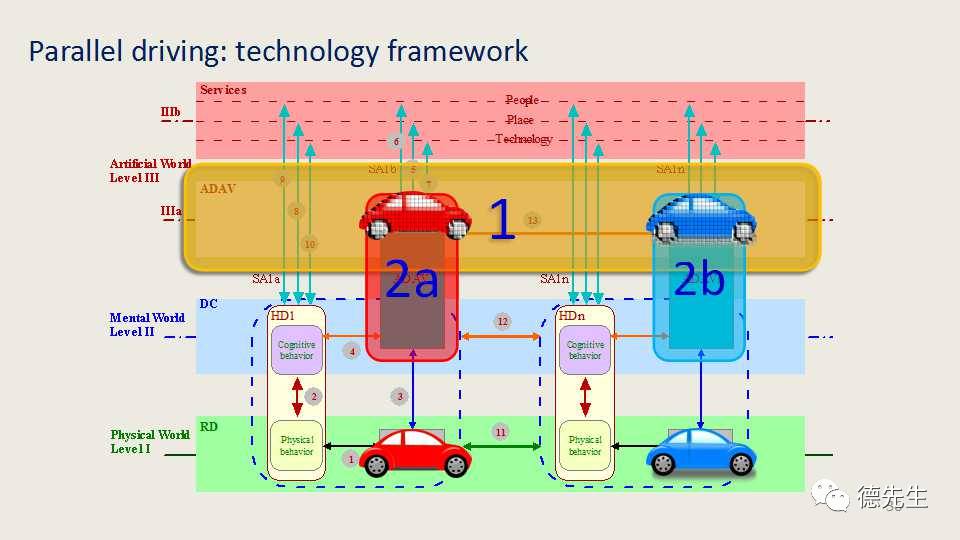
平行驾驶体系可以分成不同的层级,由上到下分别代表社会网络、虚拟车与虚拟驾驶员、驾驶员认知以及真实的驾驶。
这里展示的是在CPSS理论体系下,各个组成部分的相互关系与影响机制。
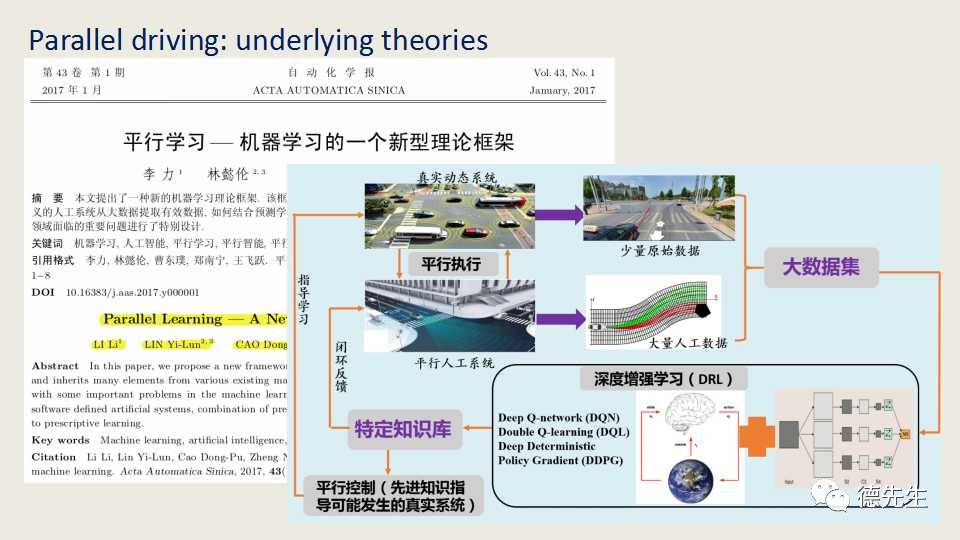
事实上平行驾驶的理论根基是“平行学习”,平行驾驶是其典型的应用场景。针对平行学习,团队的李力老师一起合作,近期也提出了基于机器学习的“平行学习”理论框架。
自动驾驶要最终落地,测试与评级至关重要。因此在平行驾驶体系下,团队也提出了多种不同的无人车测试评价方法。第一种方法是基于场景与功能的测试。
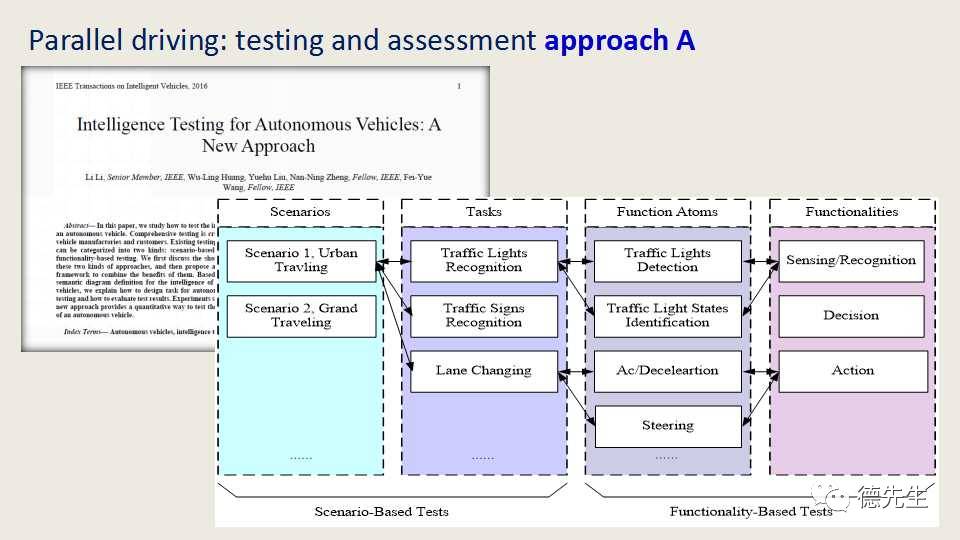
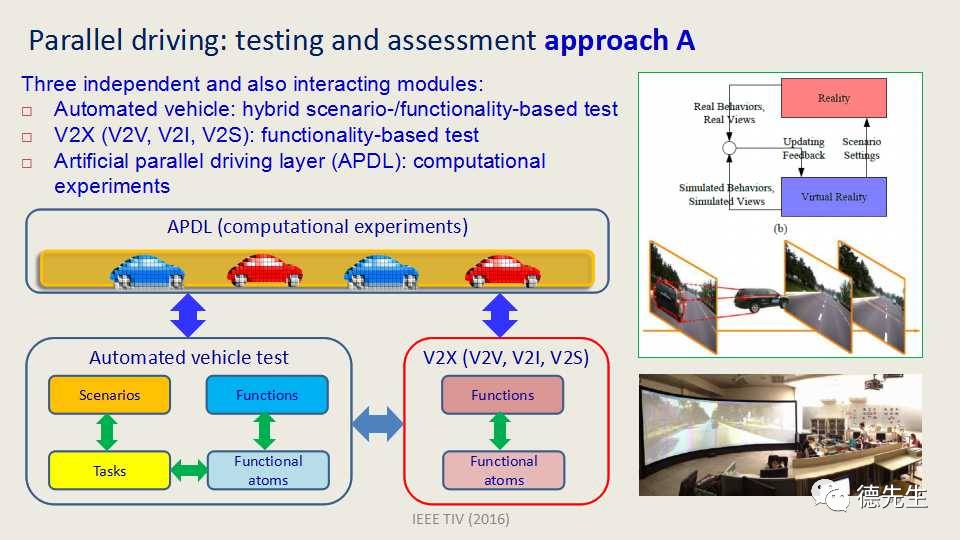
在这种方法中,底层是基于混合场景与功能的自动驾驶车辆测试,以及V2X功能测试,上层则是一个平行虚拟驾驶层,用于计算实验。上下两层共同实现平行驾驶测试评价。
另一种方法则是以美国去年九月出台的自动驾驶政策指南为代表的针对安全性测评的自动驾驶评价方法。
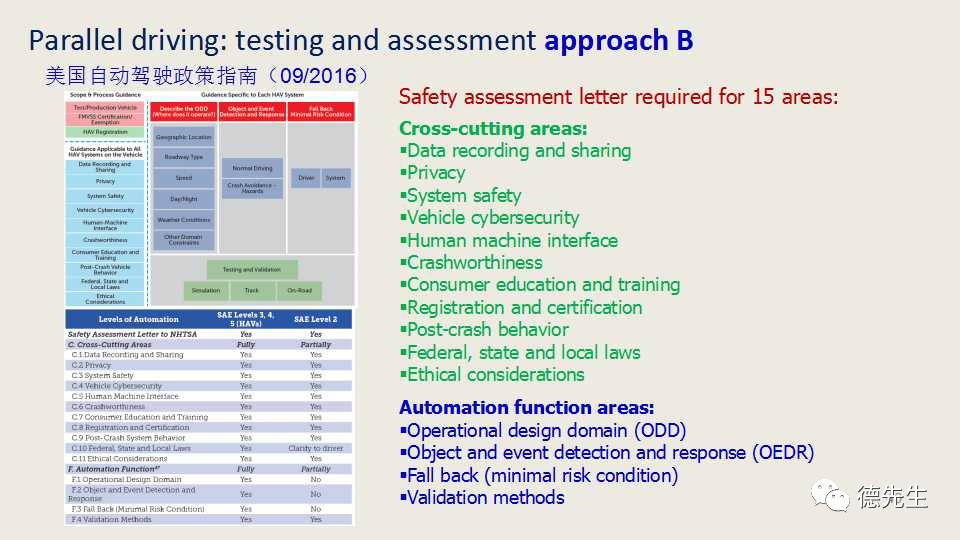
这是具体的其中15条安全性测评指标,在此基础上可以扩展为平行测试,把能效,舒适性,交通效率等指标集成进来。
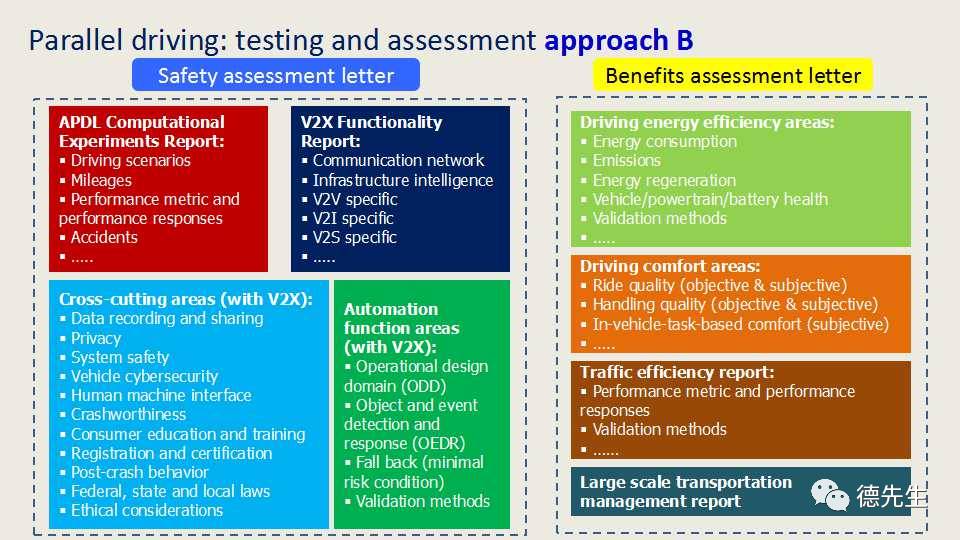
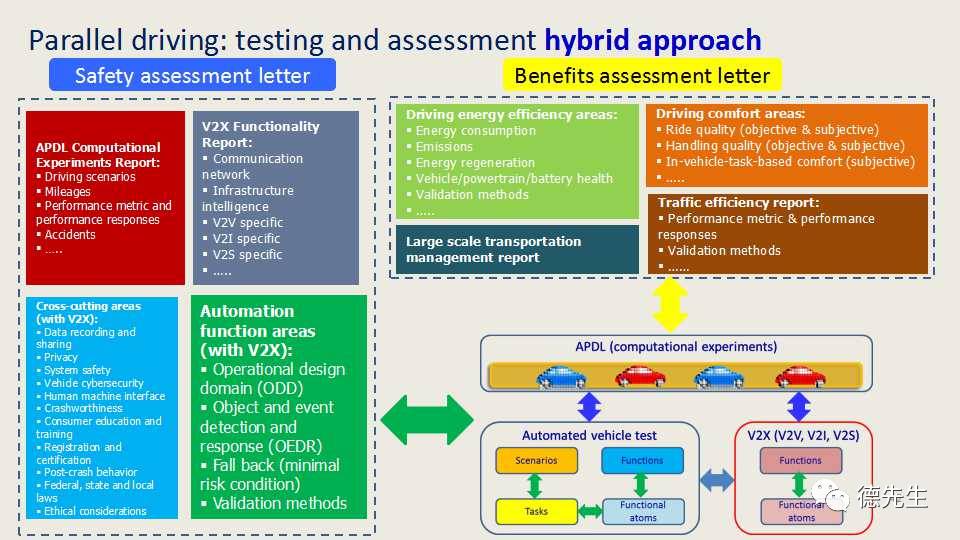
若是将上述两种评价体系有机的结合,那么自动驾驶的测试评价将会更加全面。
在平行测试理论体系指导下,团队正在开发针对“中国智能车未来挑战赛”的测试评价细则,通过各个功能模块的测试、后台管理模块的调度与监控,实现人-车-路闭环的测试。
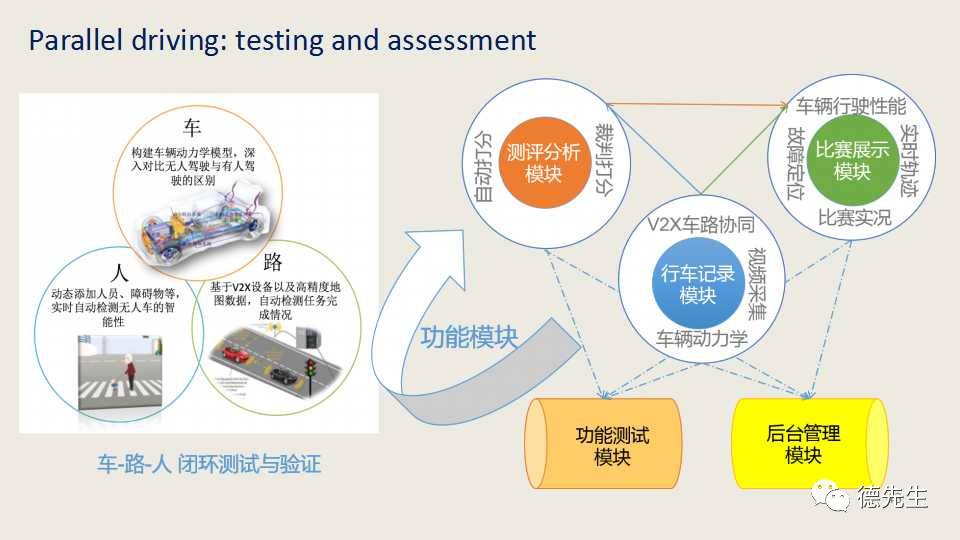
这里展示了针对比赛开发的无人车自动打分系统,通过机器打分、跟车裁判打分的混合模式,共同实现比赛车辆的性能测评。

最后,曹博士提到,在这里诚挚的邀请各位领导以及同仁参加明年在中国举办的IEEE IV智能车大会。

明年即第29届IEEE智能车大会将于6月26日至7月1日在江苏常熟和每年国内举办的“智能车未来挑战赛”同期举行。届时,中科院自动化所王飞跃老师将任大会主席,西安交大郑南宁院士任程序委员会主席。清华自动化系李力老师、美国普渡大学李灵犀教授和曹东璞博士也将共同协助会议的组织,欢迎大家报名参与。