大家好,我是程序员吴师兄,欢迎来到
图解剑指 Offer 结构化专栏
,在这个专栏里我将和大家一起学习如何用结构化的思维来思考、解题、写代码,希望能帮助你即使在面试的时候紧张也能做对。
今天分享的题目来源于剑指 Offer 系列
面试题 13. 机器人的运动范围
。
题目汇总链接:https://www.algomooc.com/jianzhioffer
一、题目描述
地上有一个 m 行 n 列的方格,从坐标
[0,0]
到坐标
[m-1,n-1]
。一个机器人从坐标
[0, 0]
的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于 k 的格子。例如,当 k 为 18 时,机器人能够进入方格
[35, 37]
,因为 3 + 5 + 3 + 7 = 18 。但它不能进入方格
[35, 38]
,因为 3 + 5 + 3 + 8 = 19。
请问该机器人能够到达多少个格子?
示例 1:
输入:m = 2, n = 3, k = 1
输出:3
示例 2:
输入:m = 3, n = 1, k = 0
输出:1
提示:
二、题目解析
我们依旧用
四步分析法
进行结构化的分析,帮助我们思考和发现规律,写出合理的代码。
1、模拟
我们需要统计能走多少个格子,不能少统计也不能重复统计。
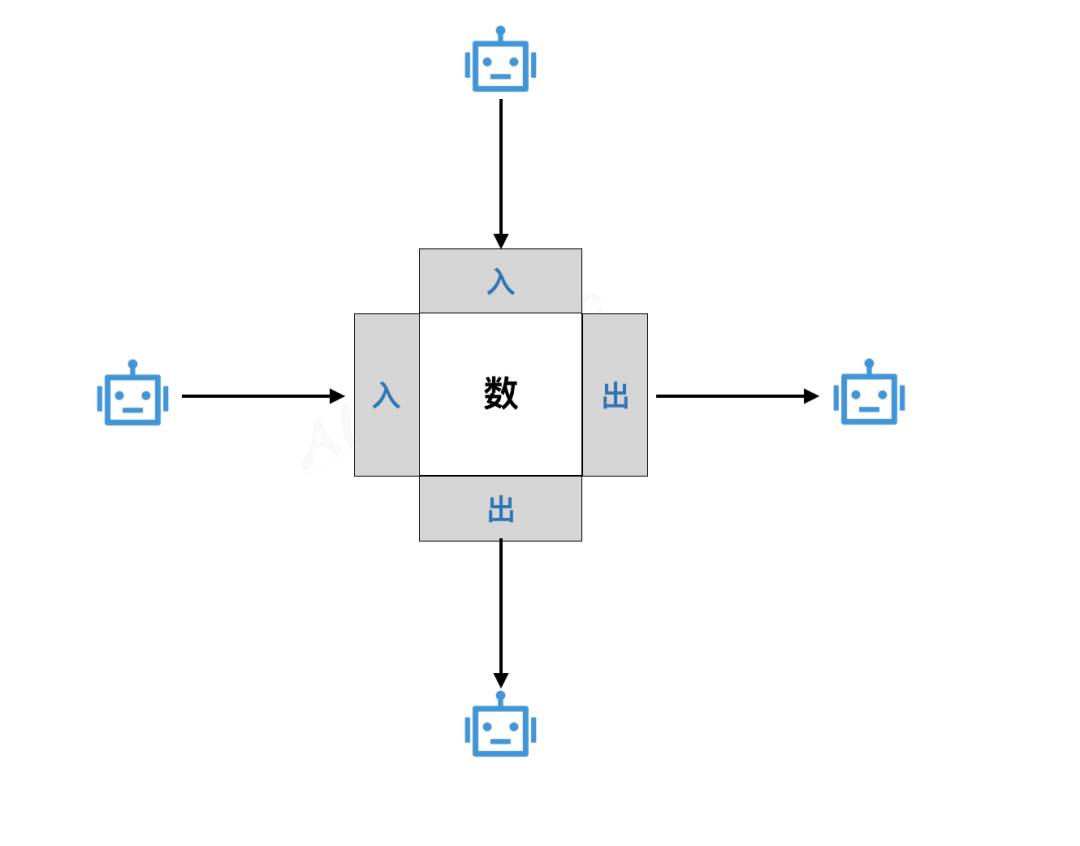
由于机器人是从左上角
(0,0)
开始移动,所以移动方向必然是
下方
或者
右方
,即机器人从格子的
左方
或者
上方
进入格子,从格子的
下方
或者
右方
离开格子。
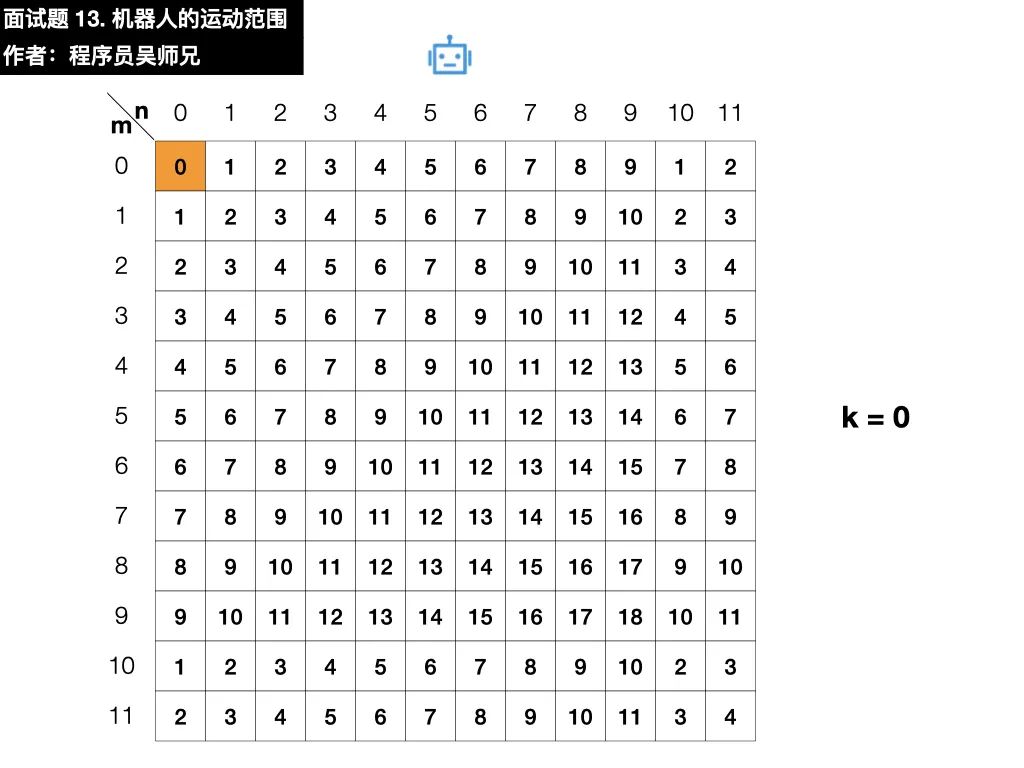
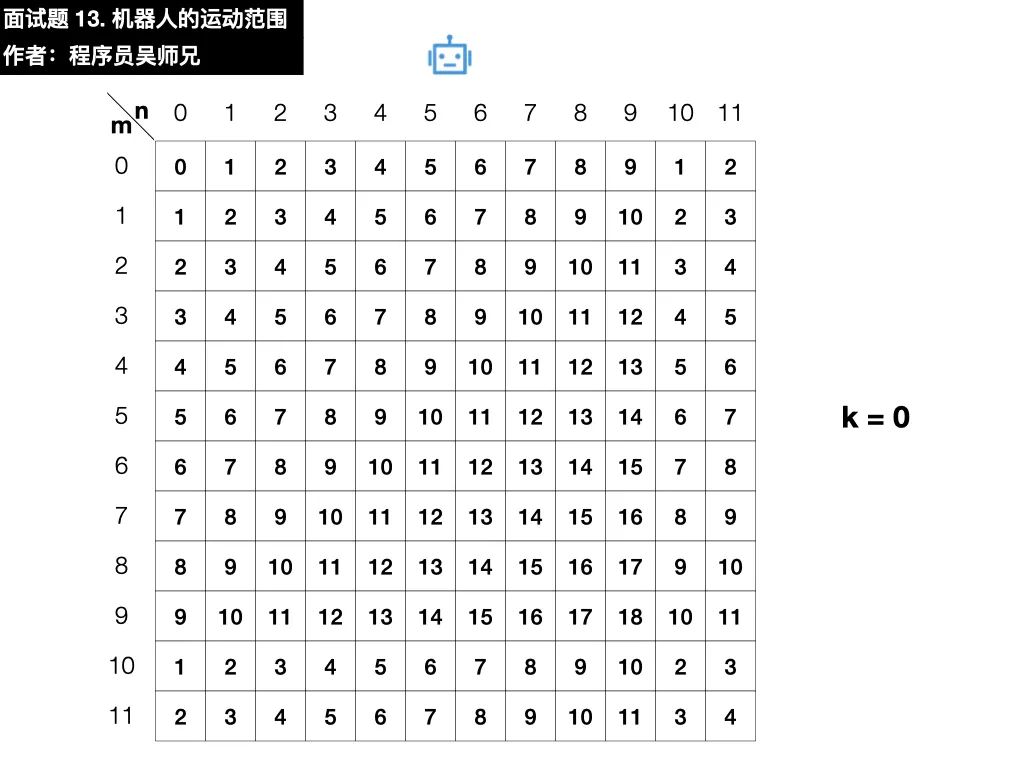
接下来依次观察一下随着 k 的变大,符合要求的区域是哪些。
注:符合要求的区域并不代表机器人一定能够到达,因为中间有一些不符合要求的区域,机器人无法跨越。
当 k = 0 时
:
 剑指 Offer 13. 机器人的运动范围.006
剑指 Offer 13. 机器人的运动范围.006
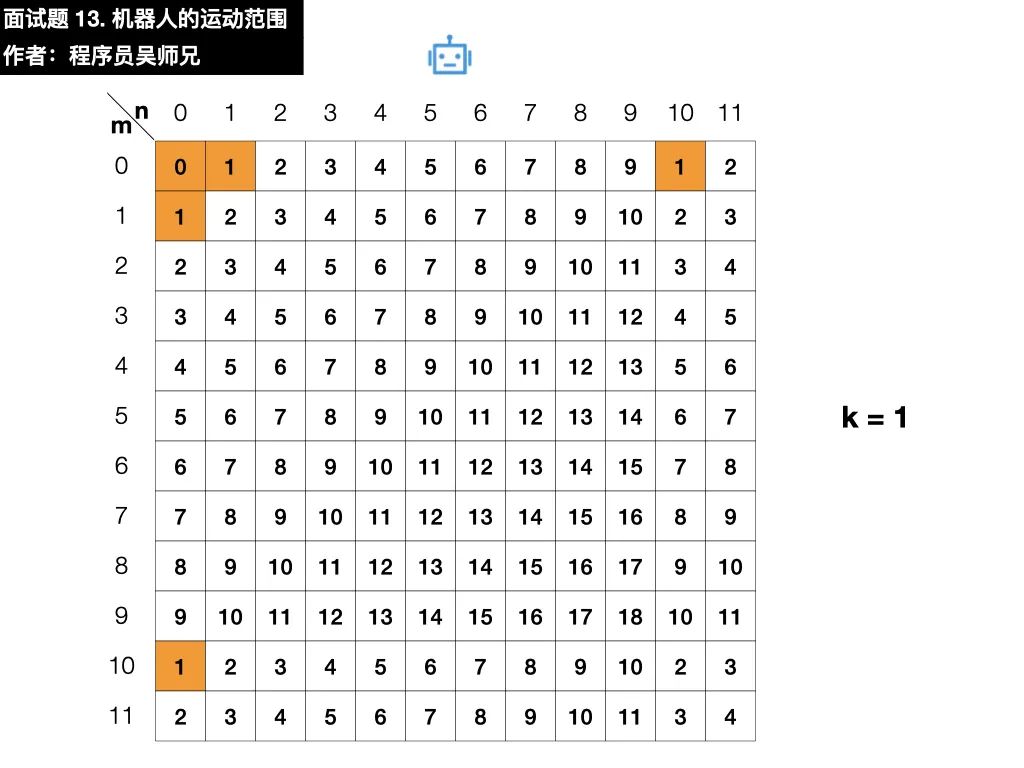
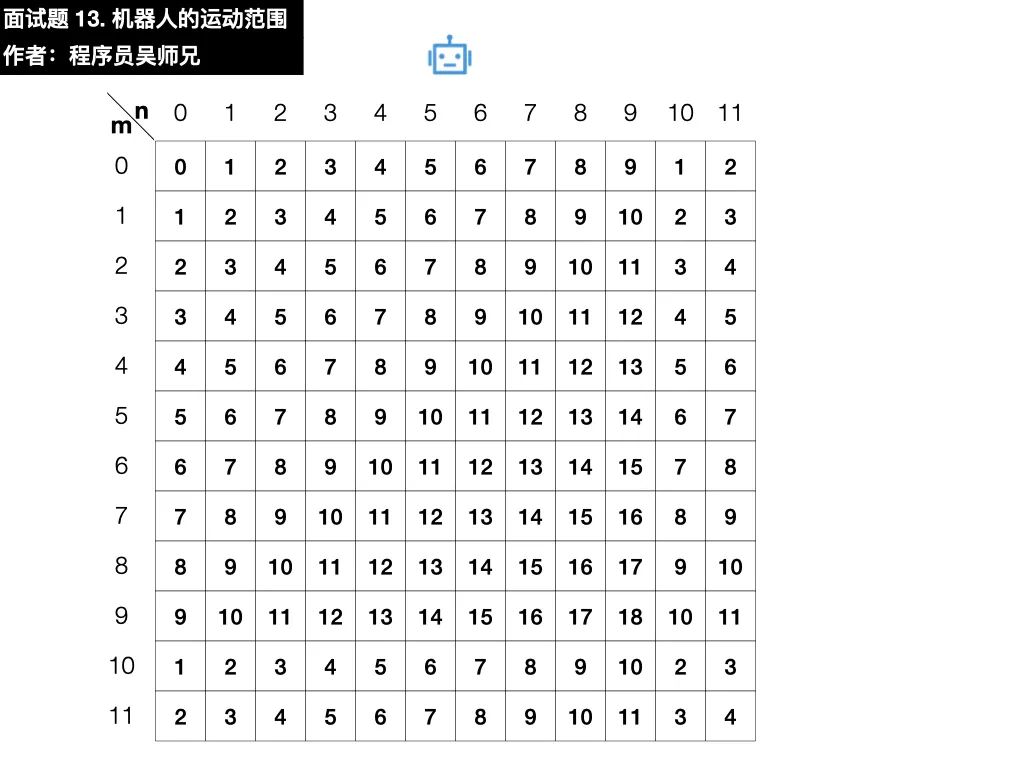
当 k = 1 时
:
 剑指 Offer 13. 机器人的运动范围.007
剑指 Offer 13. 机器人的运动范围.007
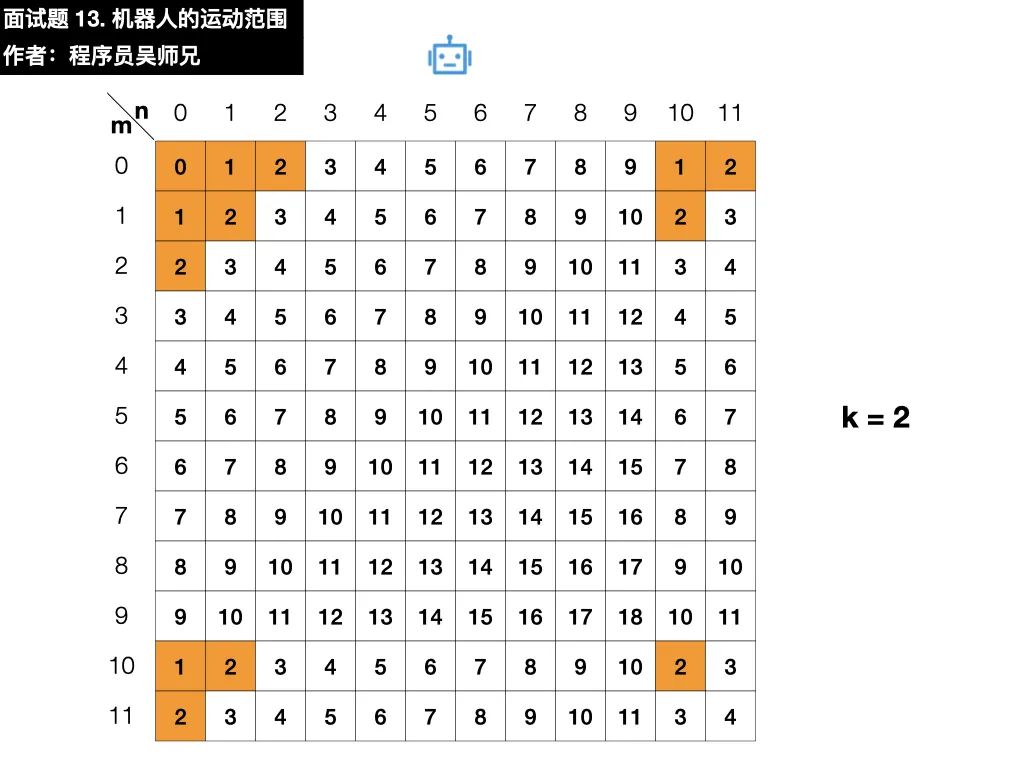
当 k = 2 时
:
 剑指 Offer 13. 机器人的运动范围.008
剑指 Offer 13. 机器人的运动范围.008
当 k = 3 时
:
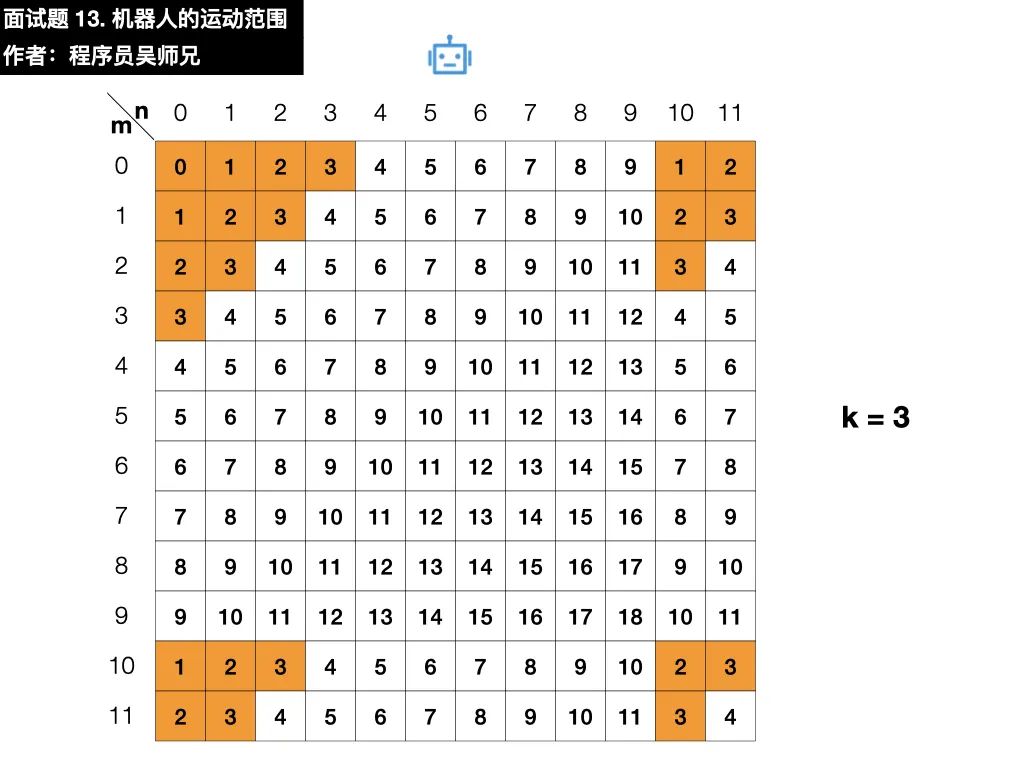 剑指 Offer 13. 机器人的运动范围.009
剑指 Offer 13. 机器人的运动范围.009
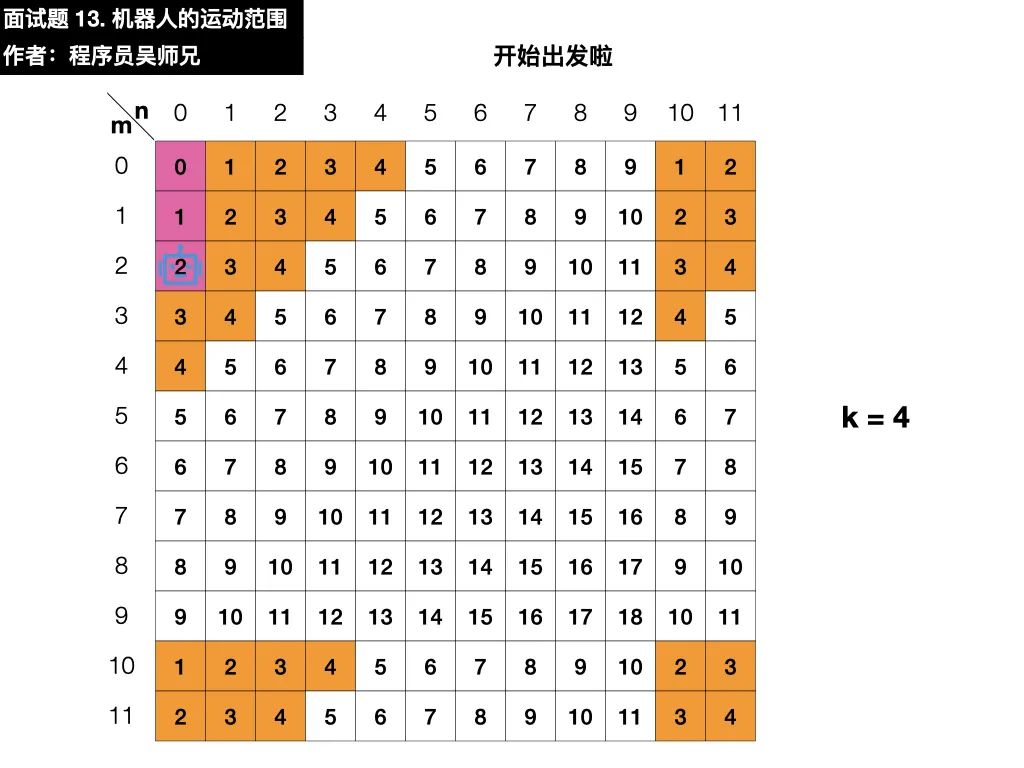
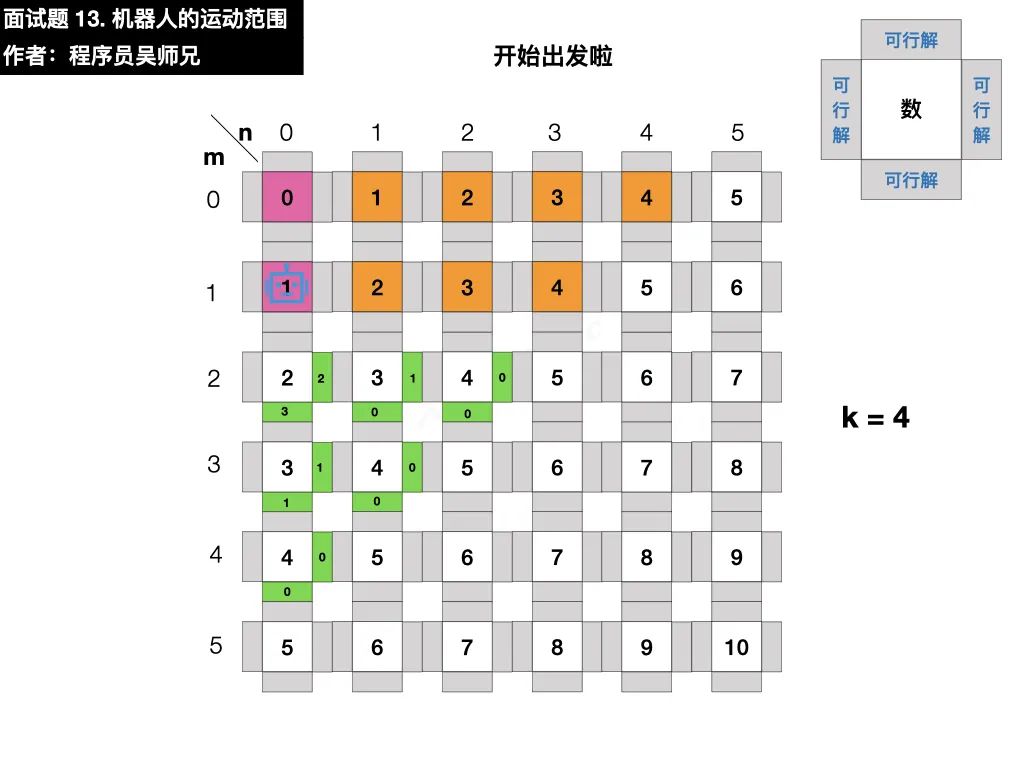
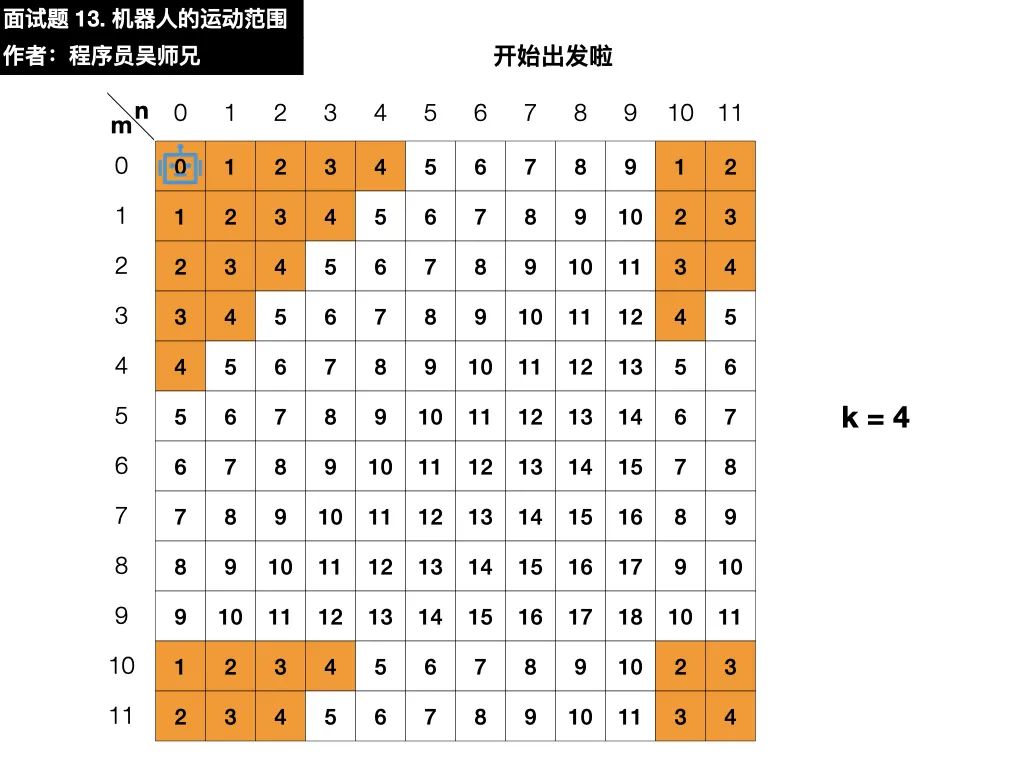
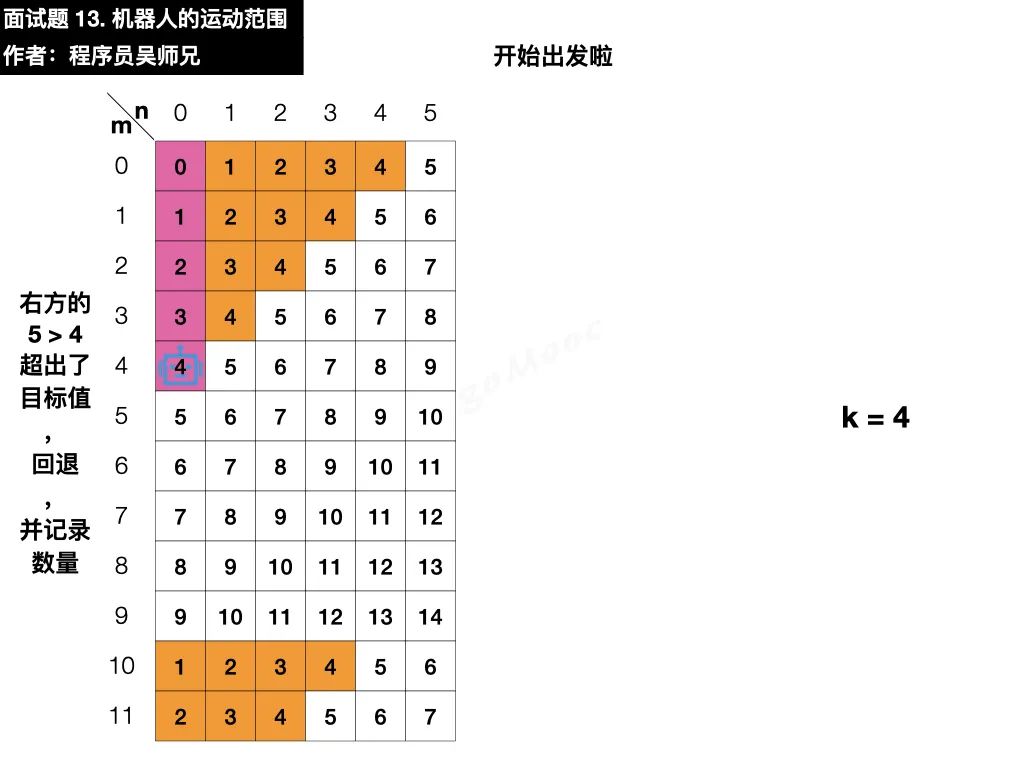
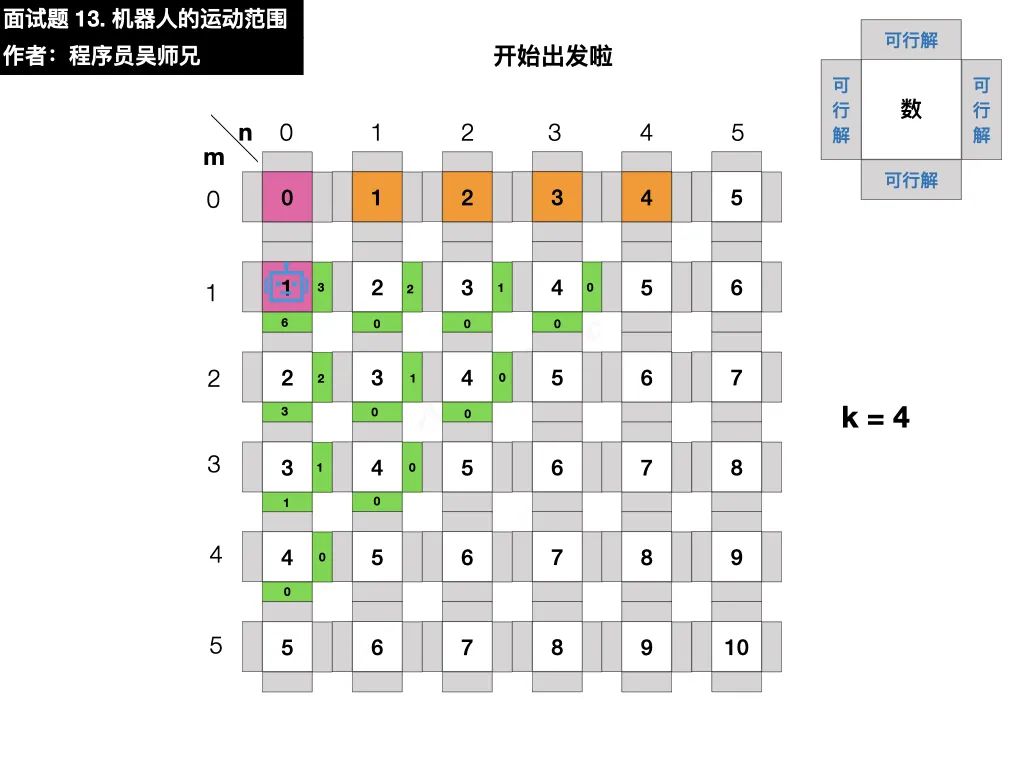
当 k = 4 时
:
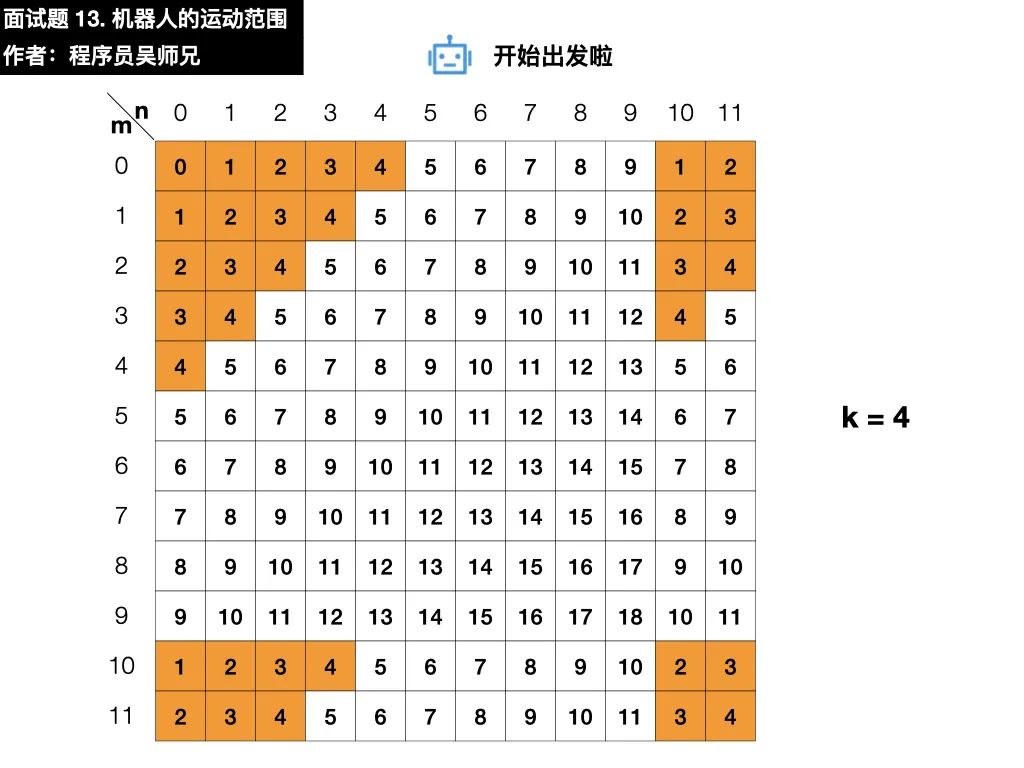 剑指 Offer 13. 机器人的运动范围.010
剑指 Offer 13. 机器人的运动范围.010
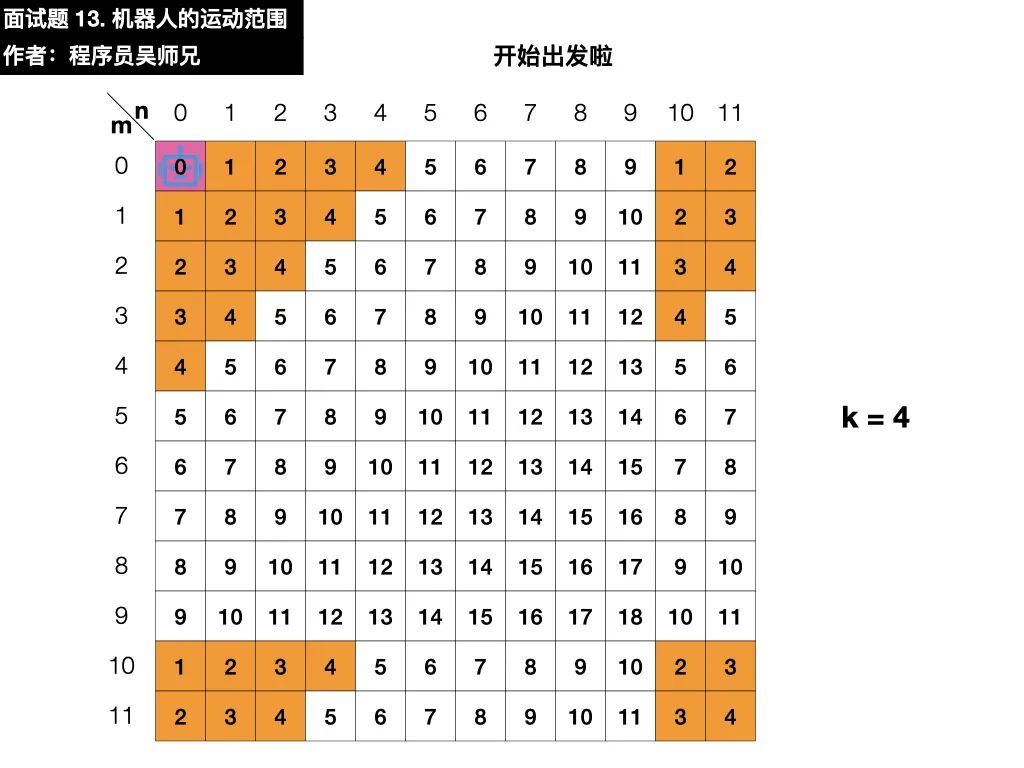
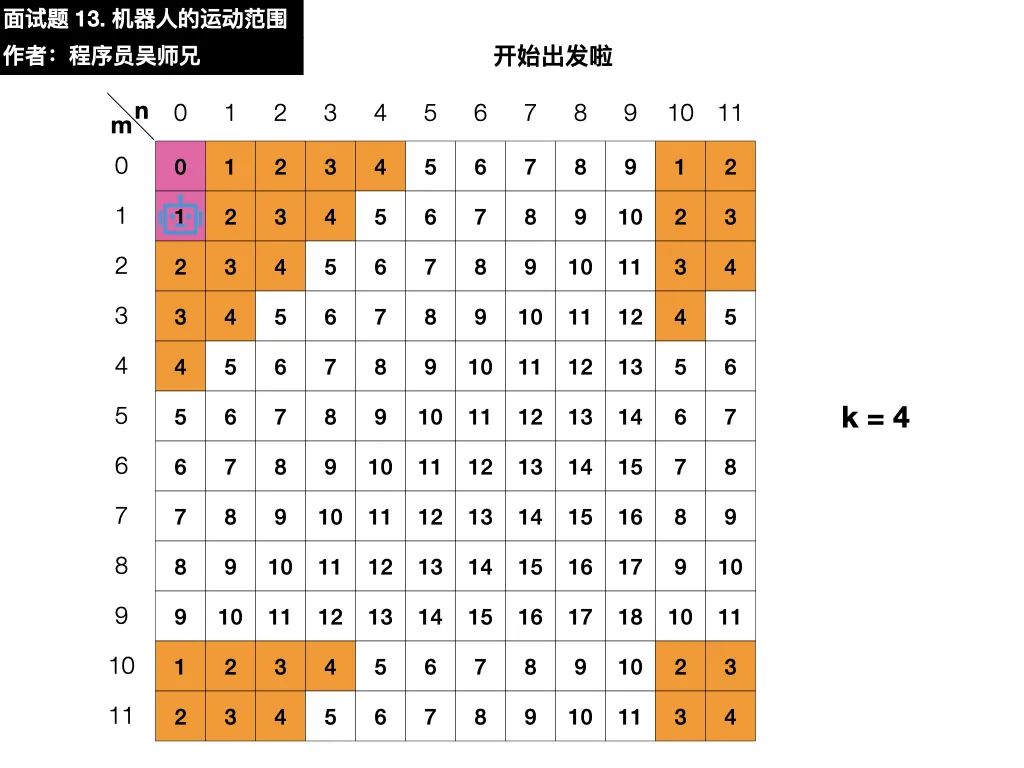
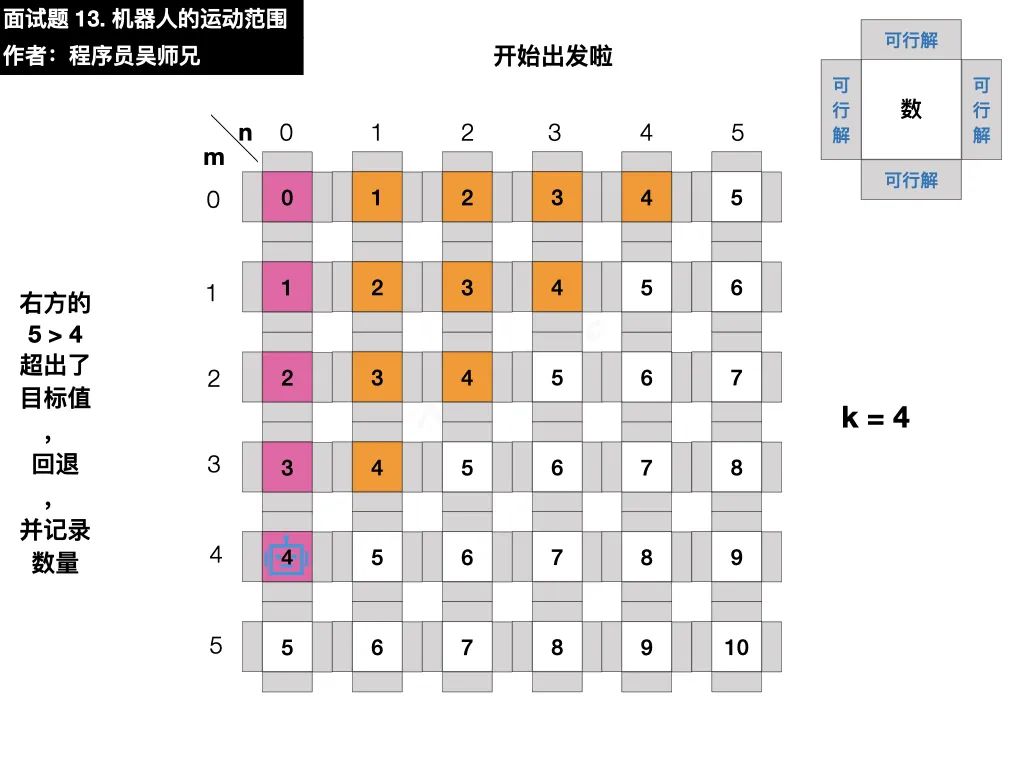
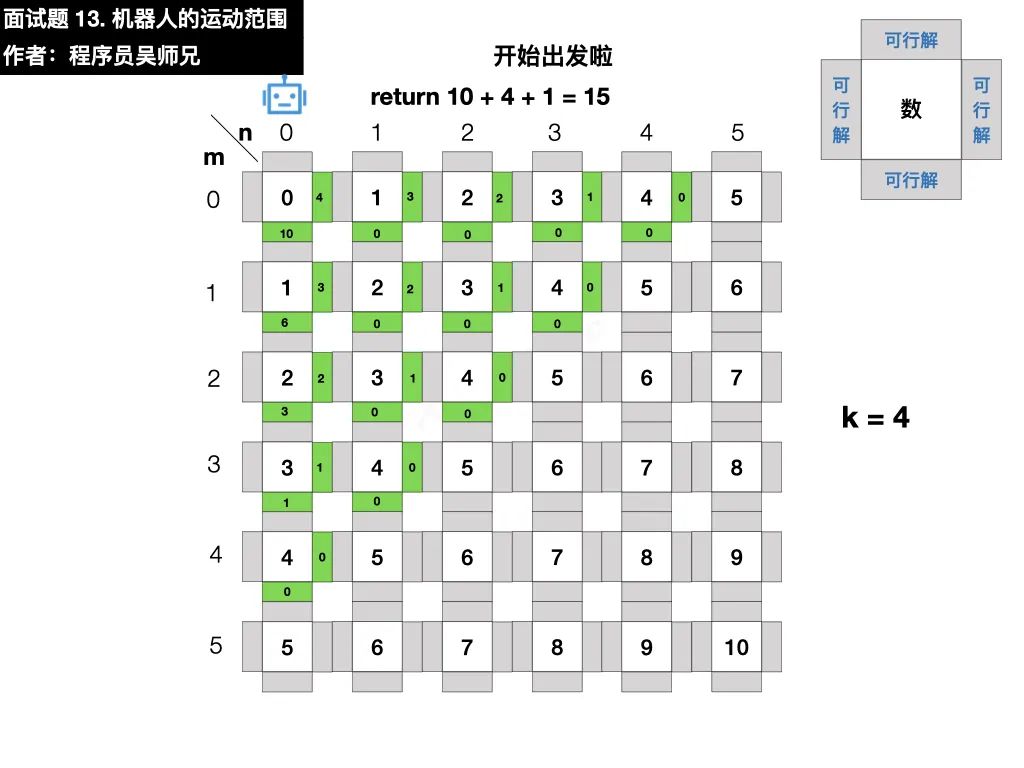
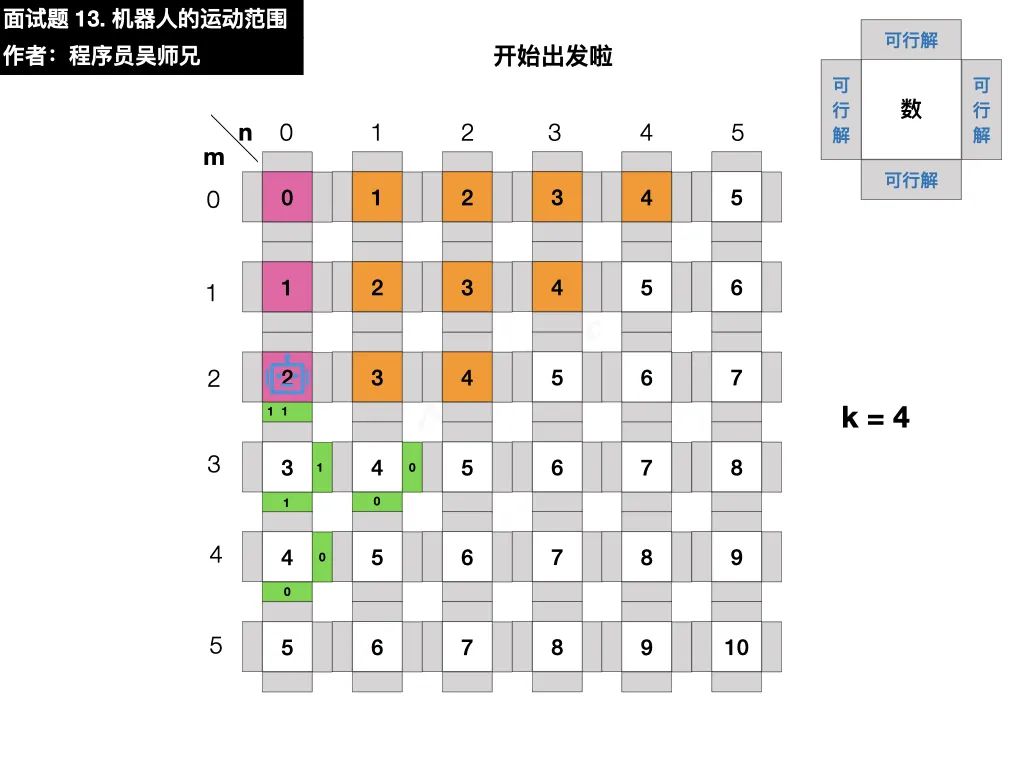
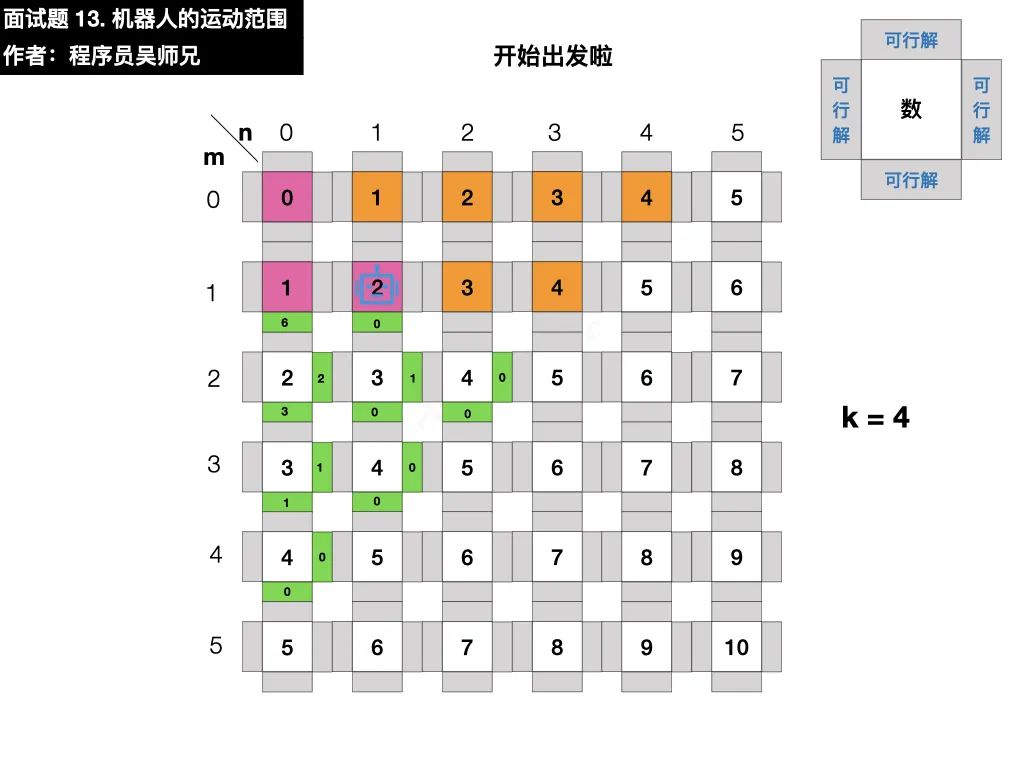
我们以 k = 4 为例,演示机器人的移动。
 剑指 Offer 13. 机器人的运动范围.012
剑指 Offer 13. 机器人的运动范围.012
 剑指 Offer 13. 机器人的运动范围.013
剑指 Offer 13. 机器人的运动范围.013
 剑指 Offer 13. 机器人的运动范围.014
剑指 Offer 13. 机器人的运动范围.014
 剑指 Offer 13. 机器人的运动范围.015
剑指 Offer 13. 机器人的运动范围.015
 剑指 Offer 13. 机器人的运动范围.016
剑指 Offer 13. 机器人的运动范围.016
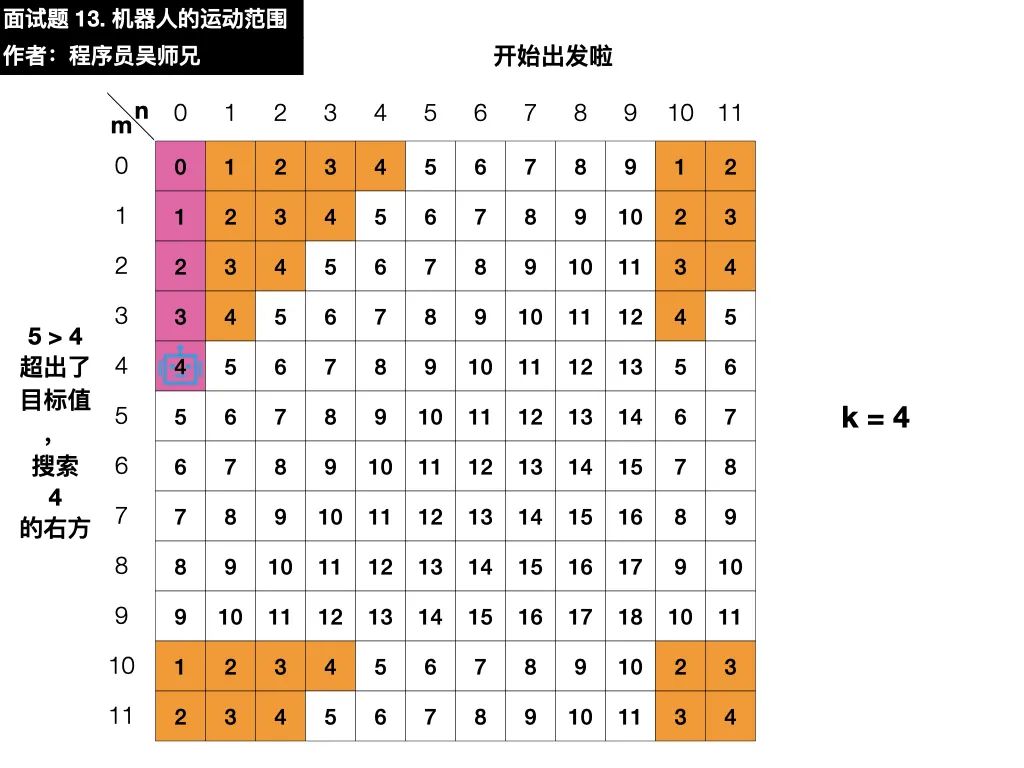
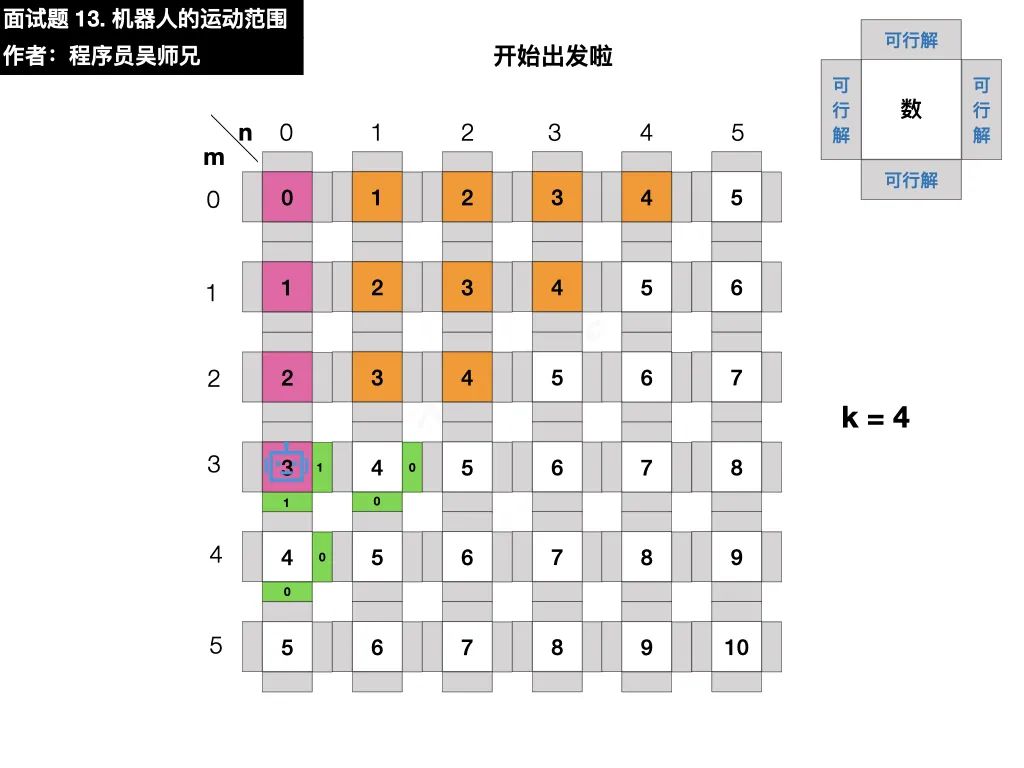
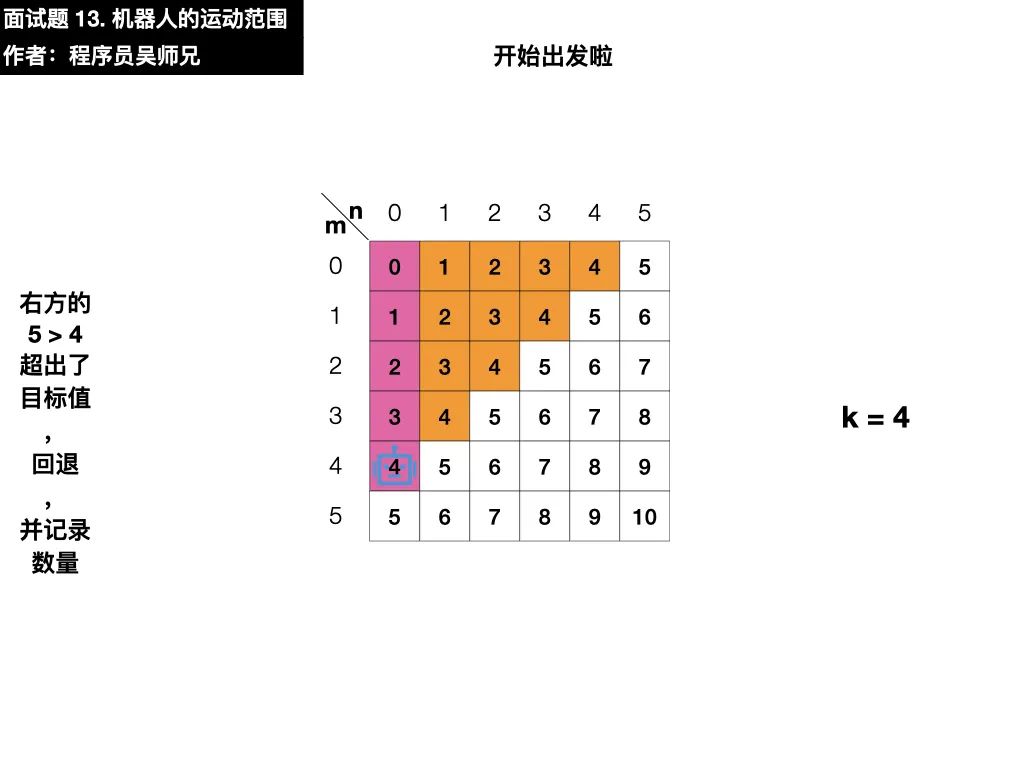
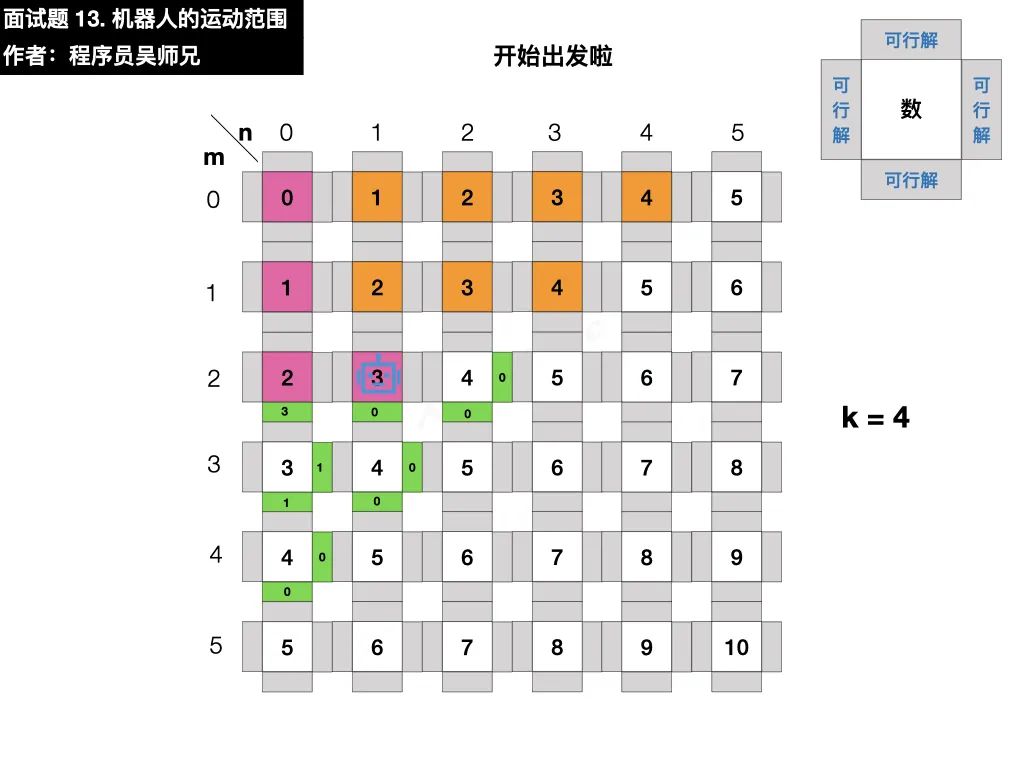
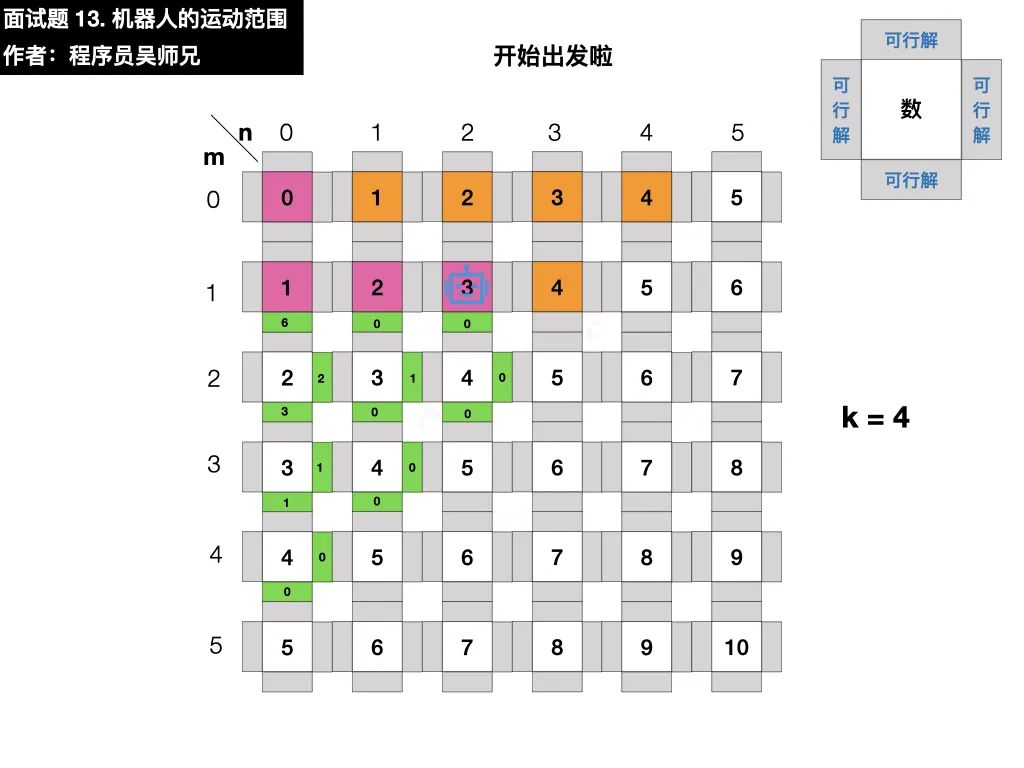
当机器人移动到 4 这个格子的时候,无法再向下移动,因为下方的 5 超过了 4,属于无法进入的区域,根据我们之前的结论,机器人需要向右移动,此时右方的 5 也超过了 4,机器人无法再移动到任何一个新的格子,需要
返回
,左方是边界,因此只能向上返回,在返回的同时
需要携带统计到的格子,避免遗失
。
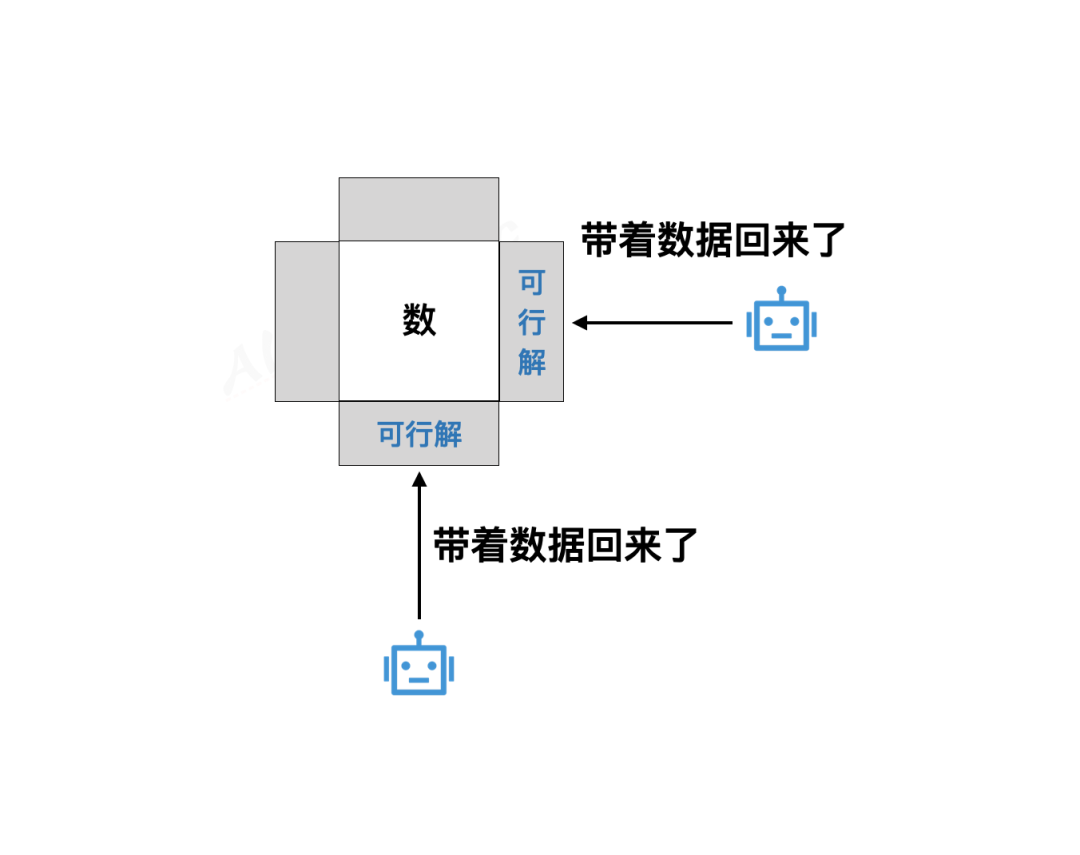
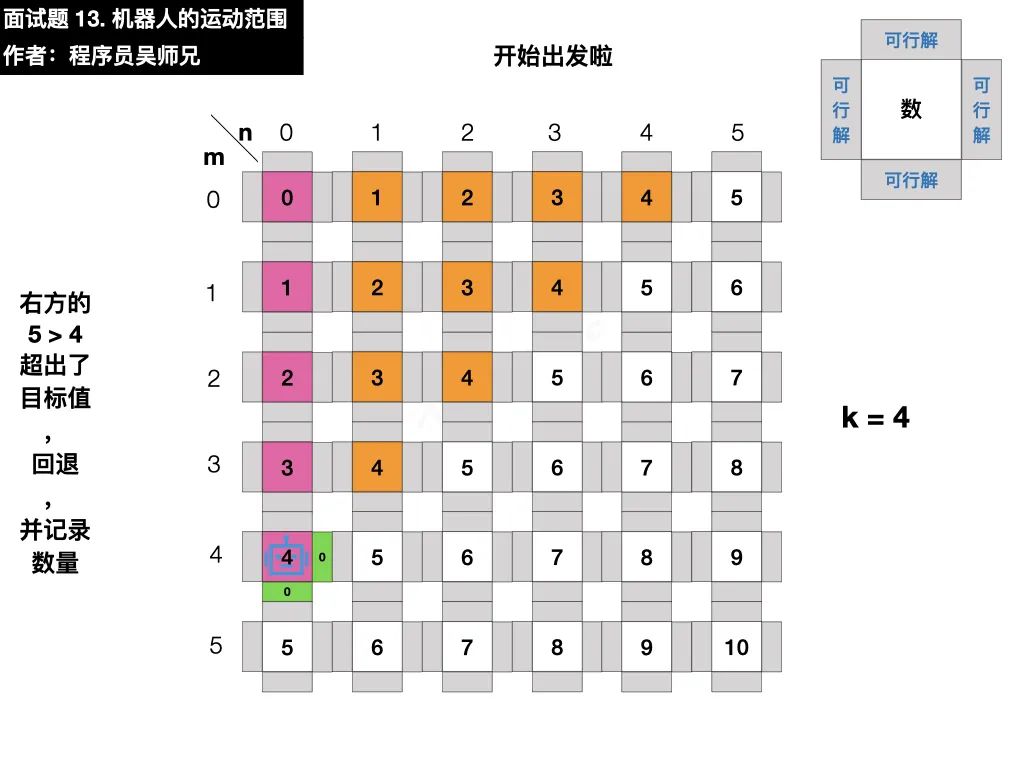
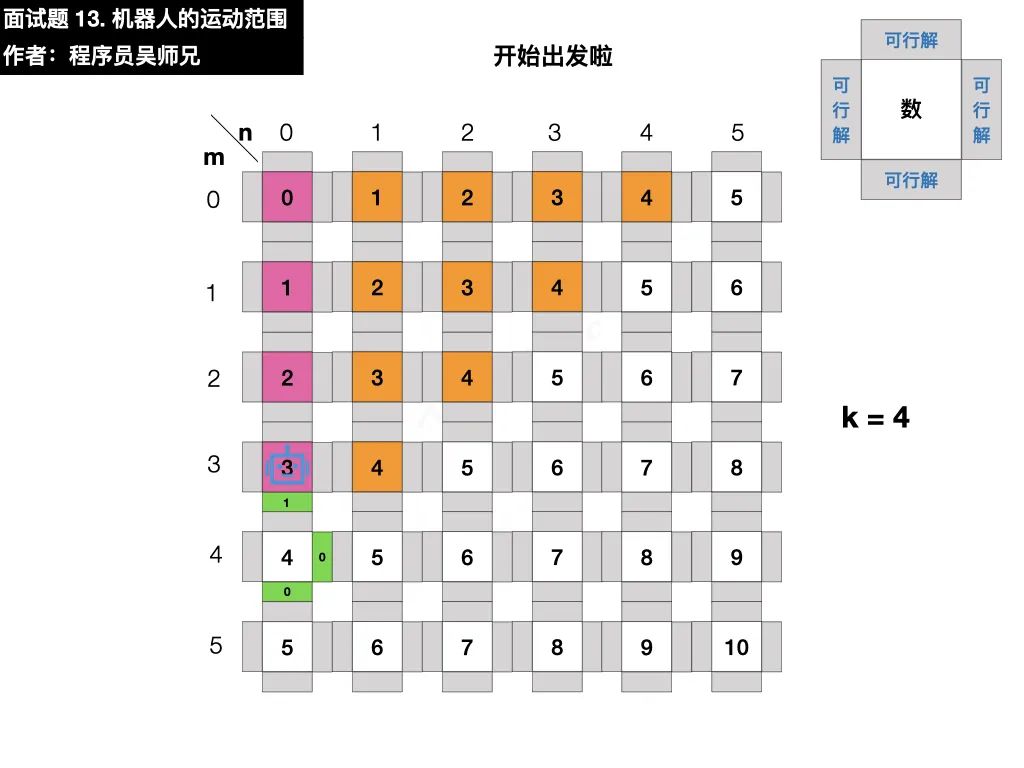
为了方便演示,在每个格子的四周分别设置一个小方块,表示机器人
由此格子出发可到达区域的数量
,实际上,我们只需要观察格子的下方和右方统计数即可,因为机器人只能此格子的
下方
或者
右方
离开格子,返回时也必然从此格子的
下方
或者
右方
返回到此格子并带来了统计的数量。
 剑指 Offer 13. 机器人的运动范围.021
剑指 Offer 13. 机器人的运动范围.021
 剑指 Offer 13. 机器人的运动范围.022
剑指 Offer 13. 机器人的运动范围.022
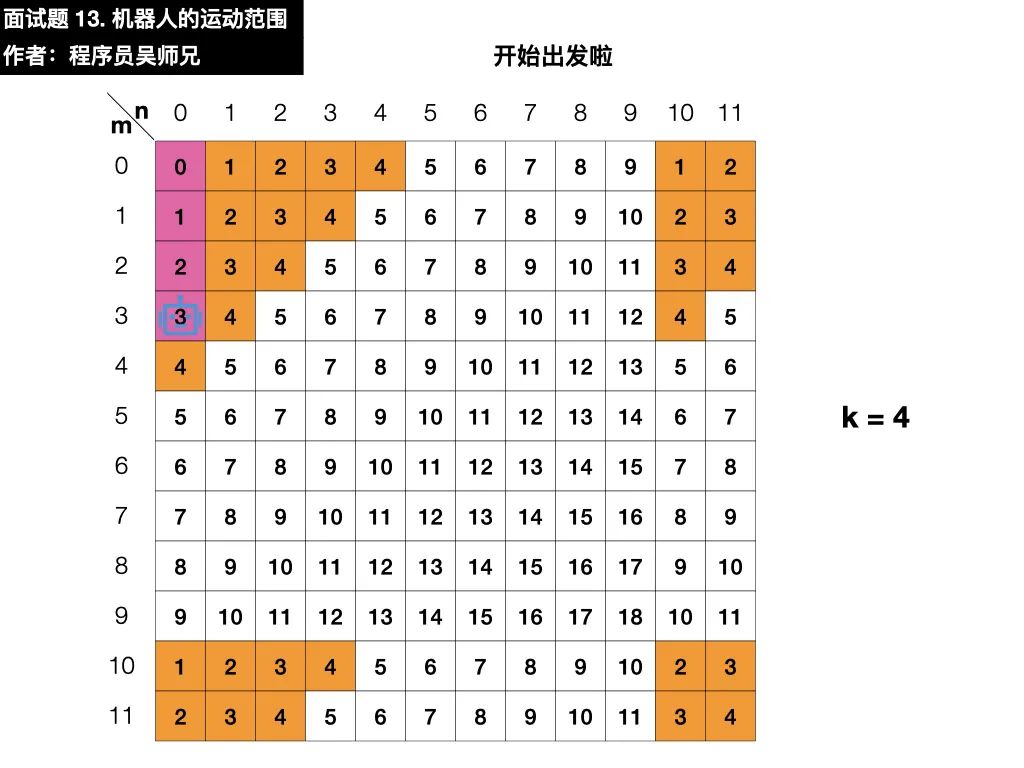
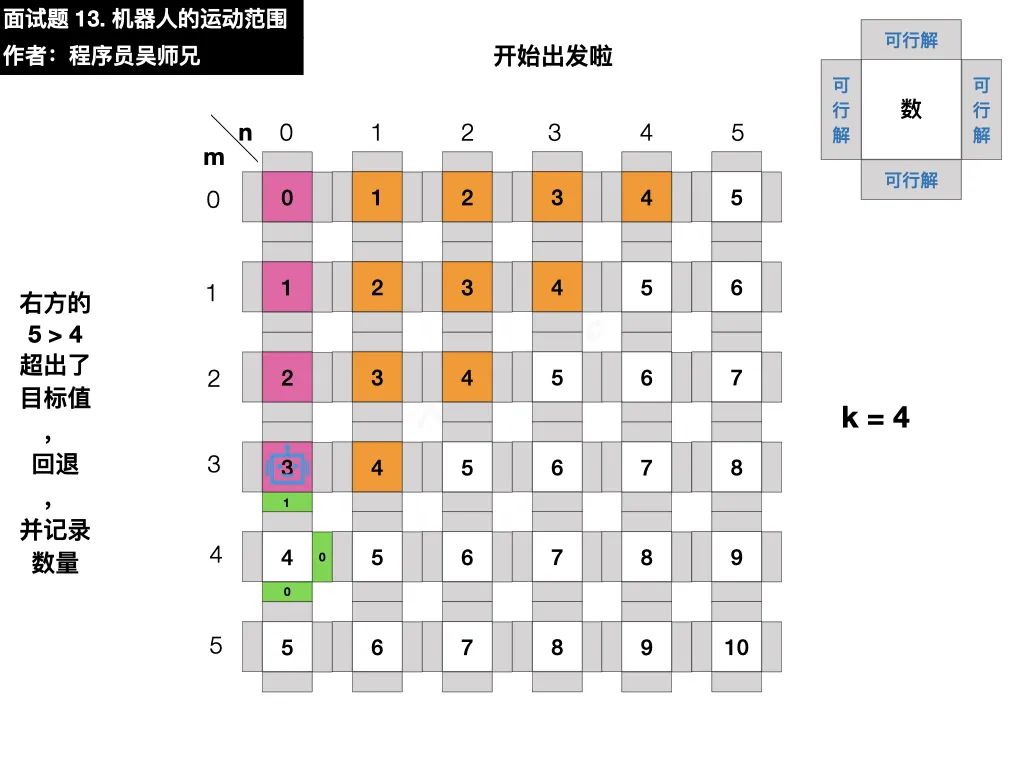
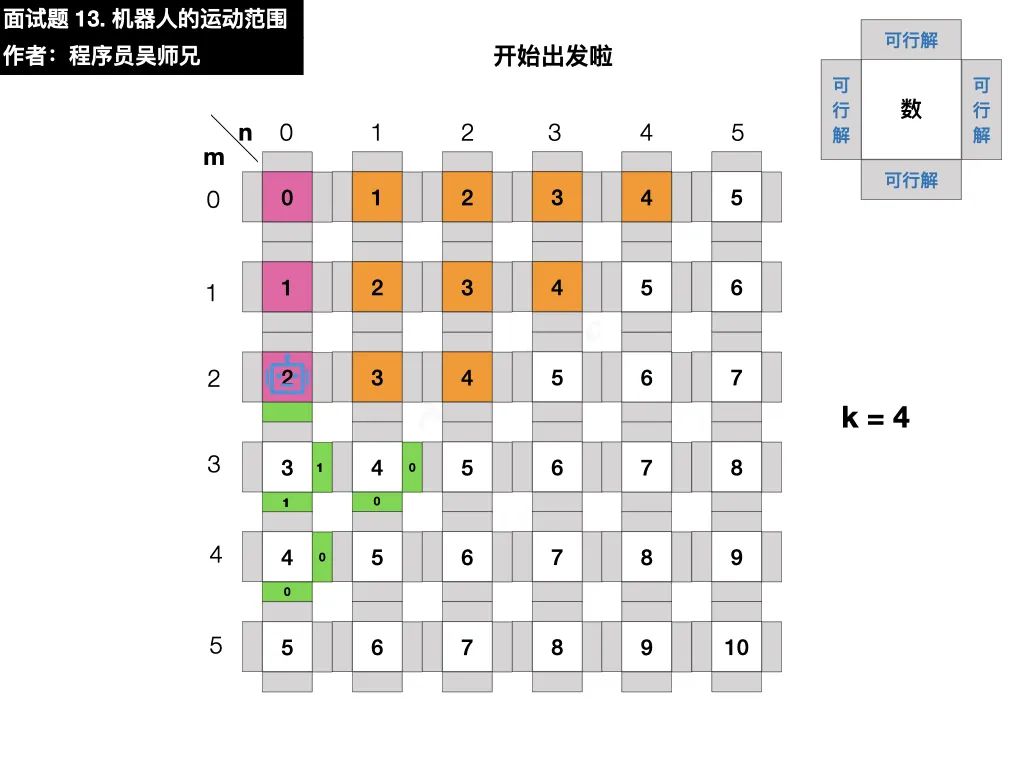
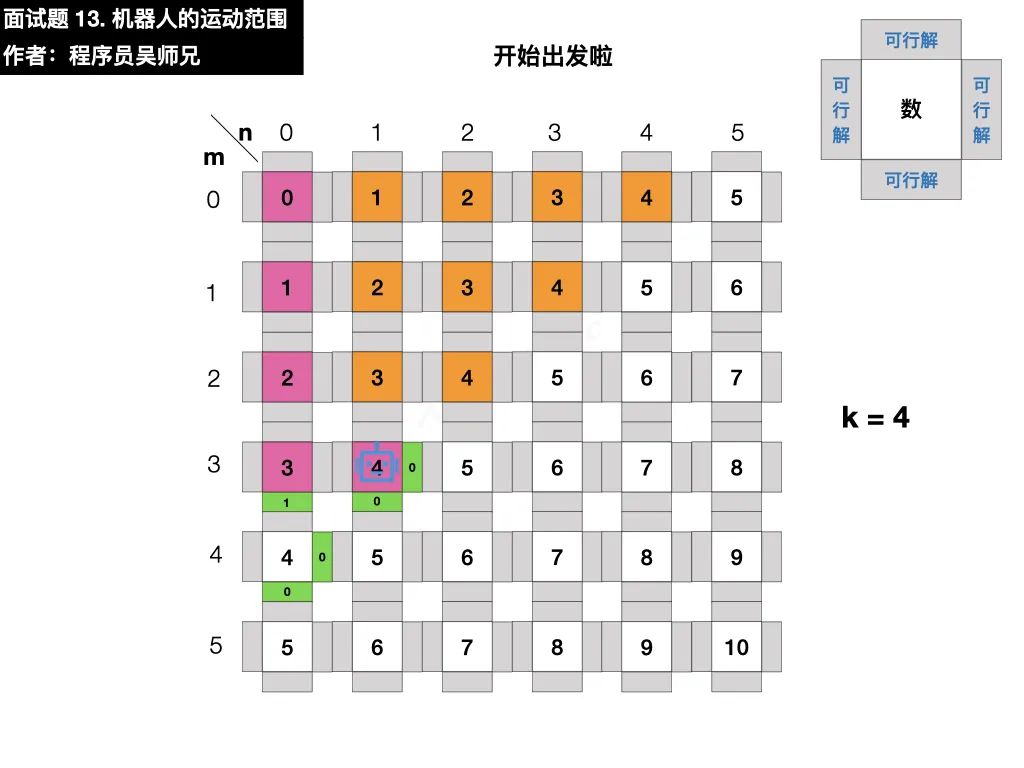
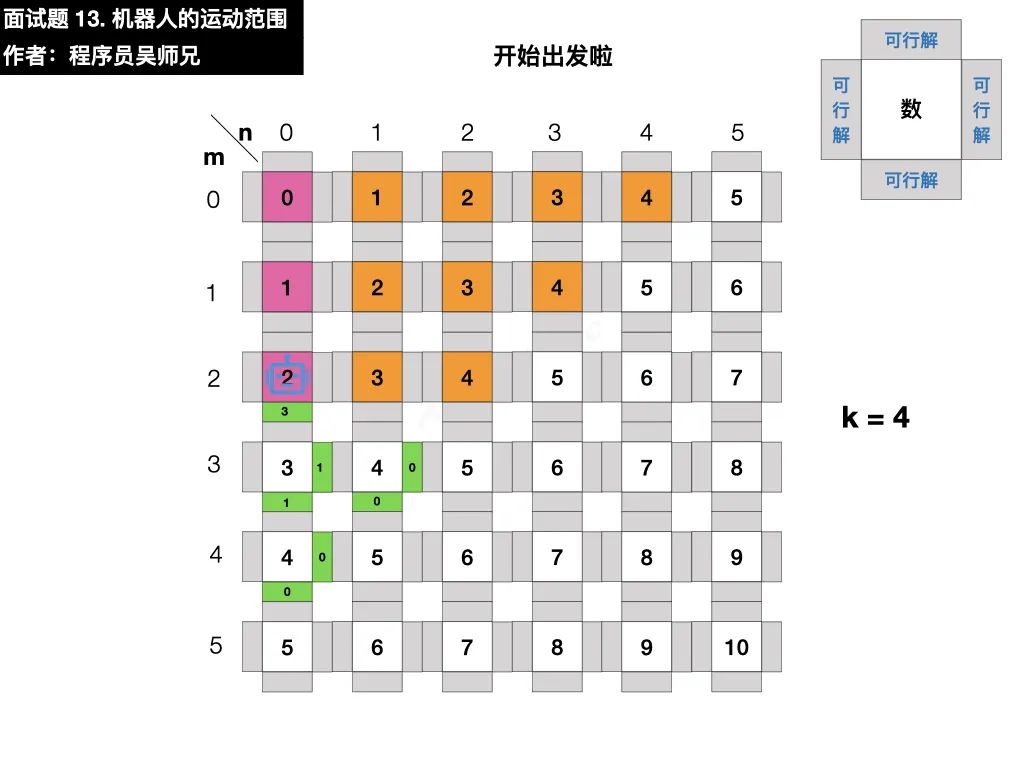
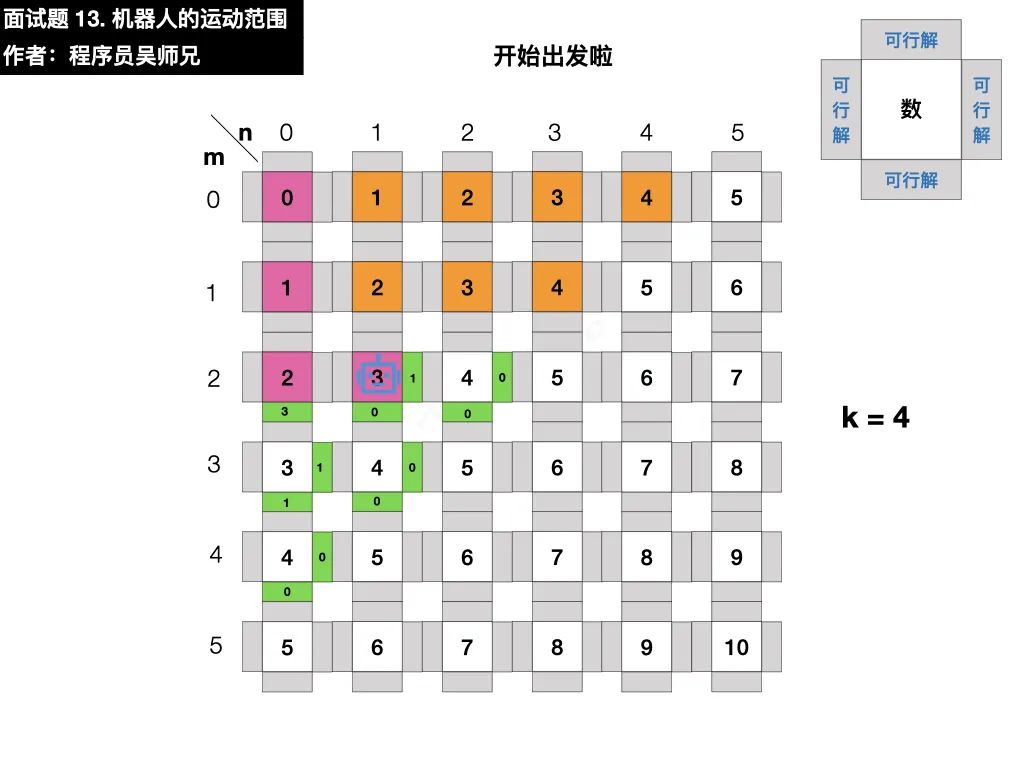
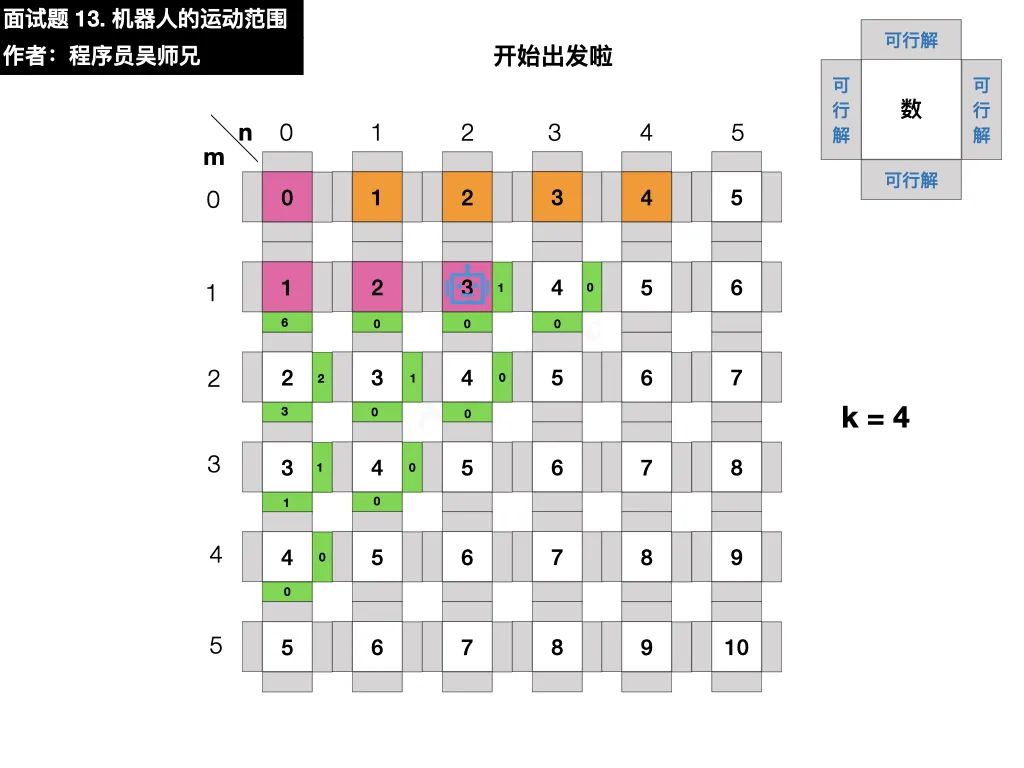
机器人从 4 返回 3 的同时,携带着统计的数量 1,记录在格子 3 的下方,表明机器人
由 3 这个格子出发可到达区域的数量为 1
,同时,为了避免多次统计格子 4,将格子 4 的状态清除。
 剑指 Offer 13. 机器人的运动范围.023
剑指 Offer 13. 机器人的运动范围.023
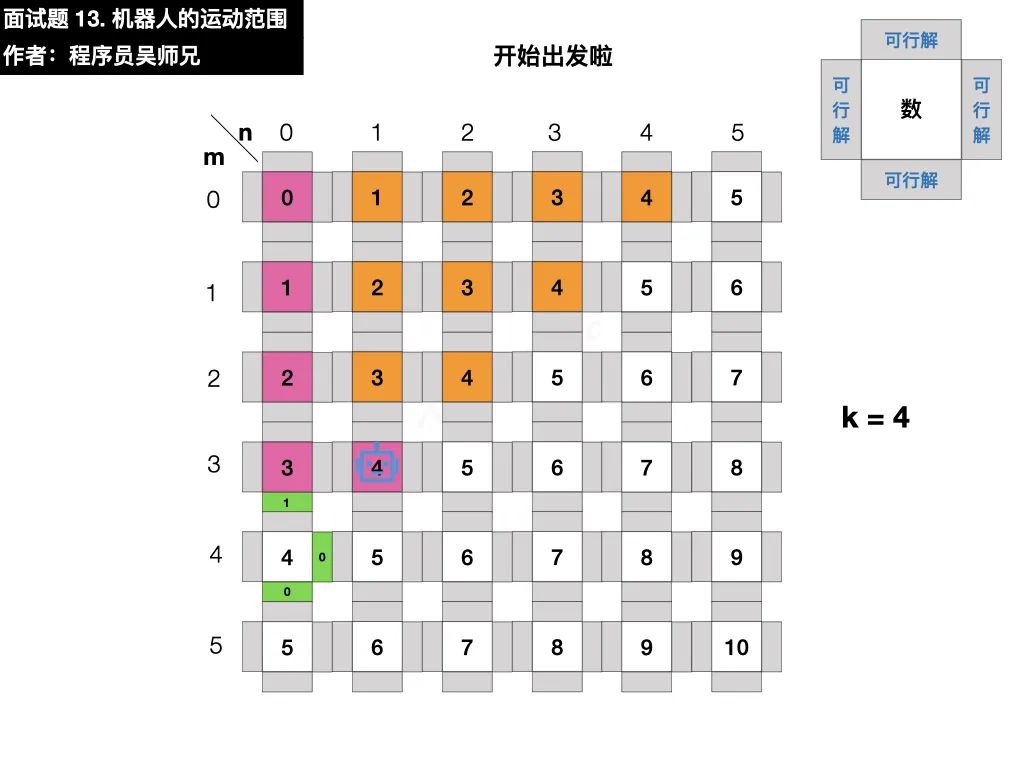
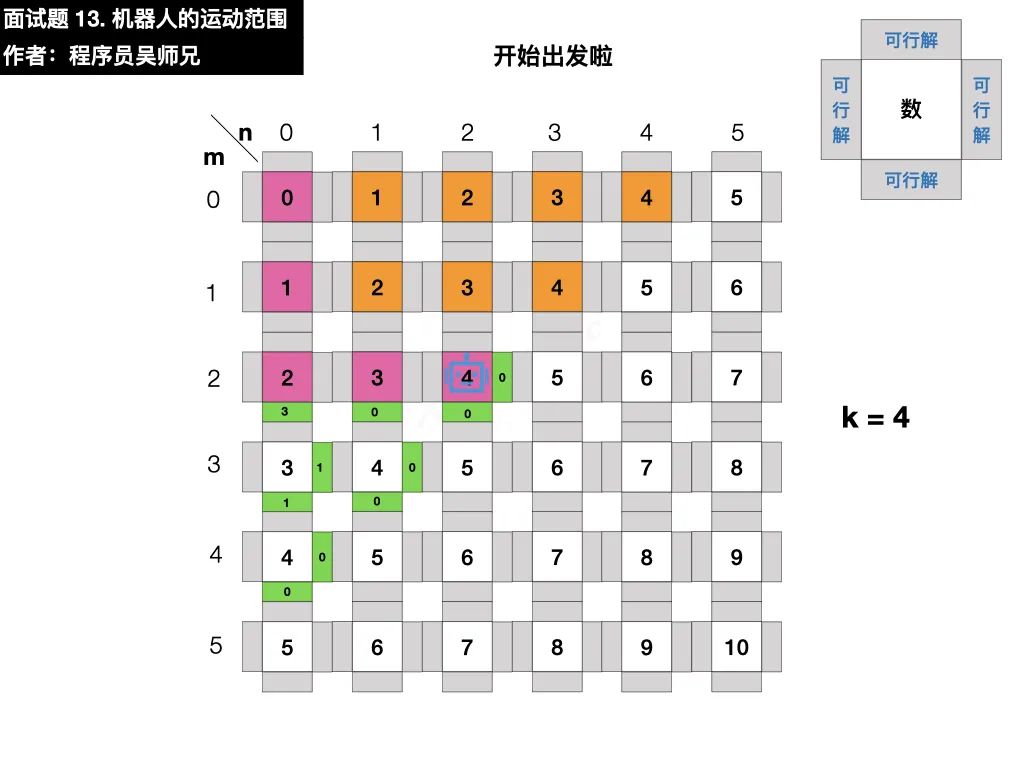
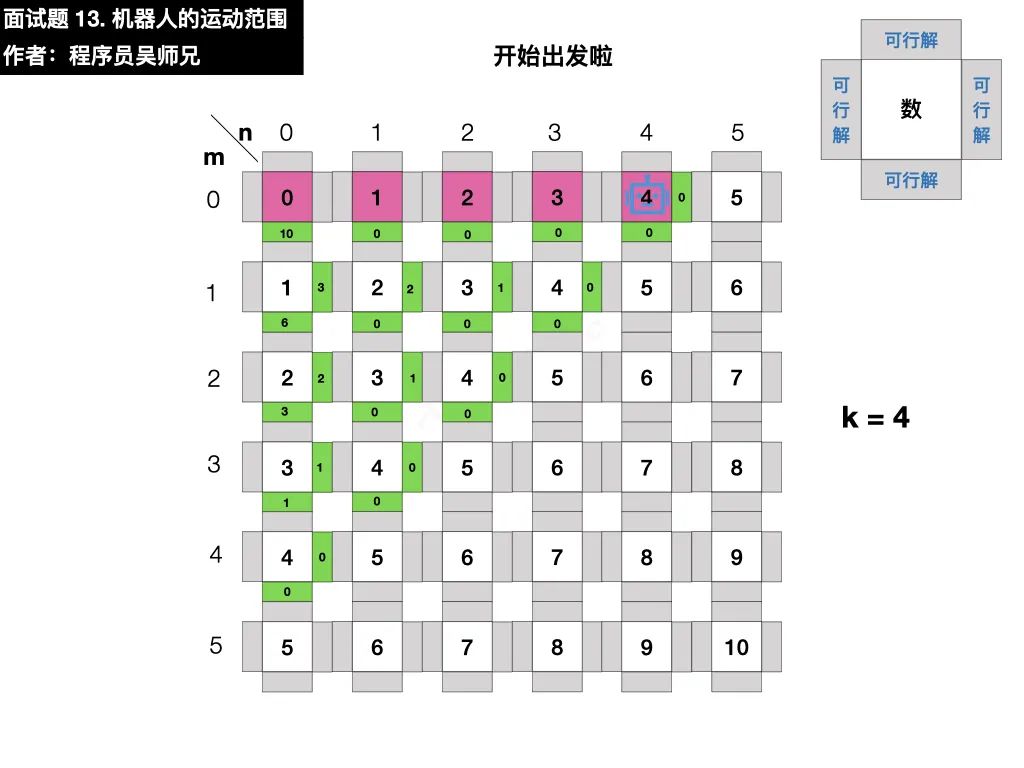
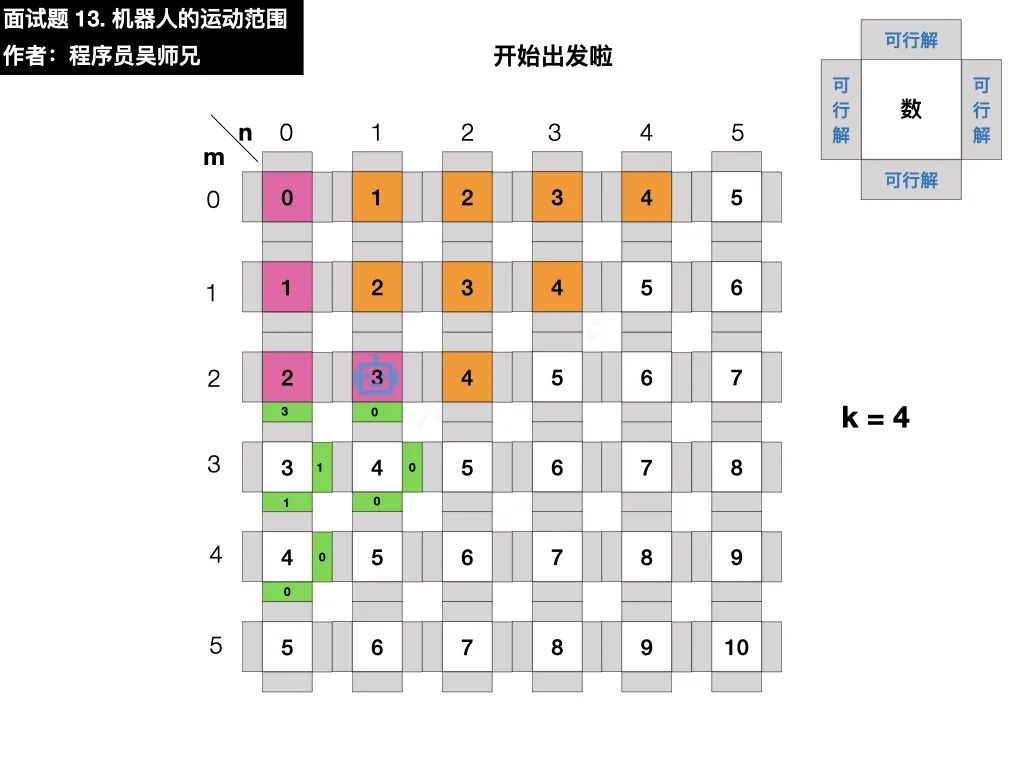
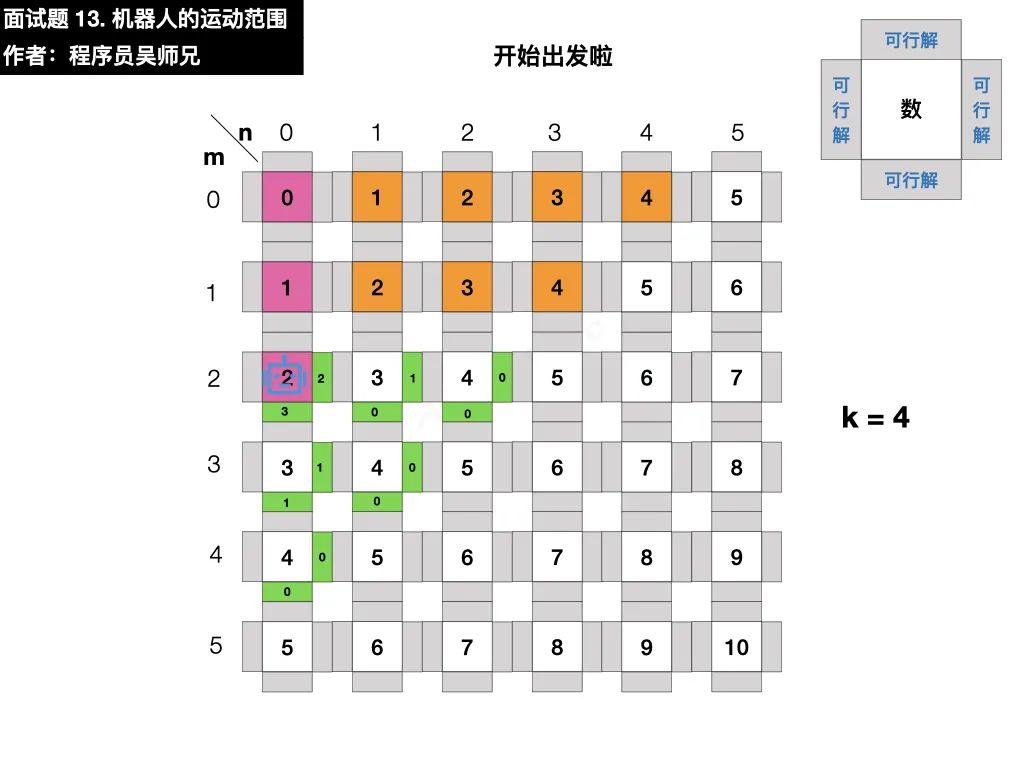
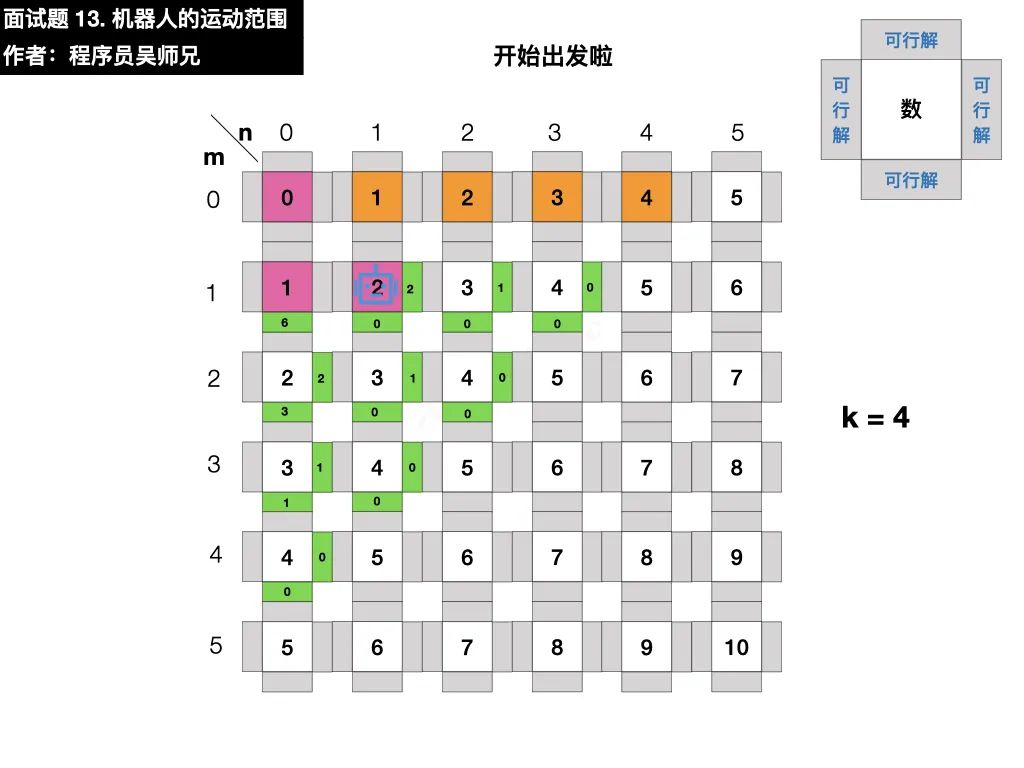
接下来,让机器人从格子 3 的右方开始出发,探索右方可到达的区域。
 剑指 Offer 13. 机器人的运动范围.025
剑指 Offer 13. 机器人的运动范围.025
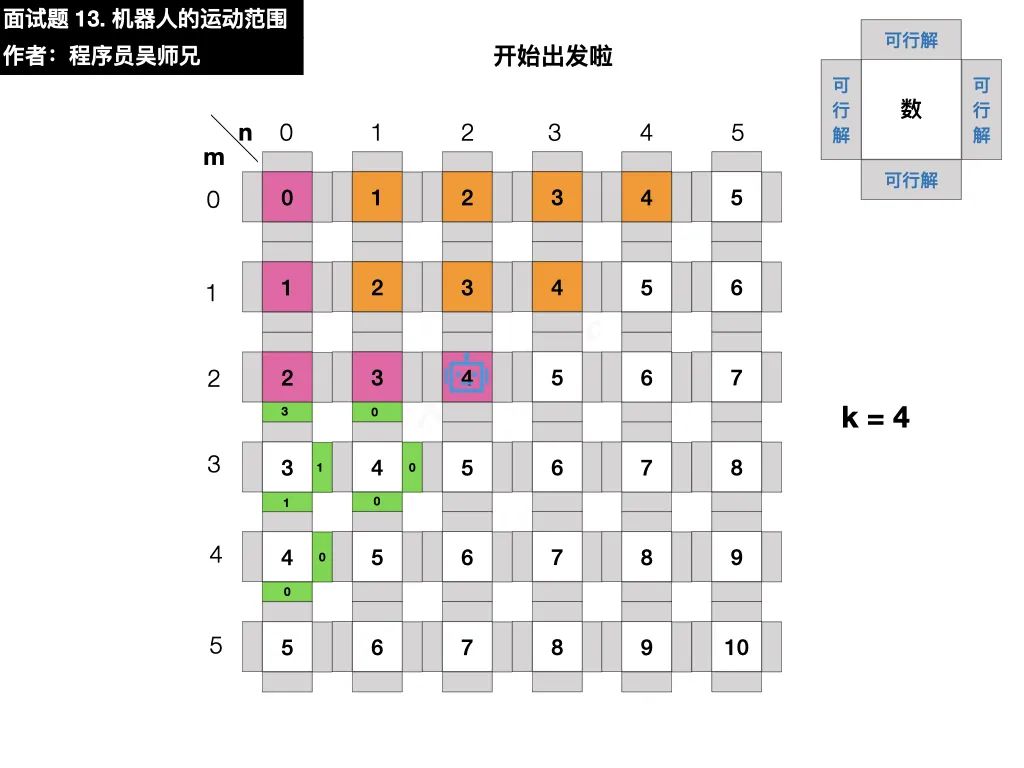
到达格子 4 后,下方和右方都不可到达,返回并携带数量,同时清除状态。
 剑指 Offer 13. 机器人的运动范围.028
剑指 Offer 13. 机器人的运动范围.028
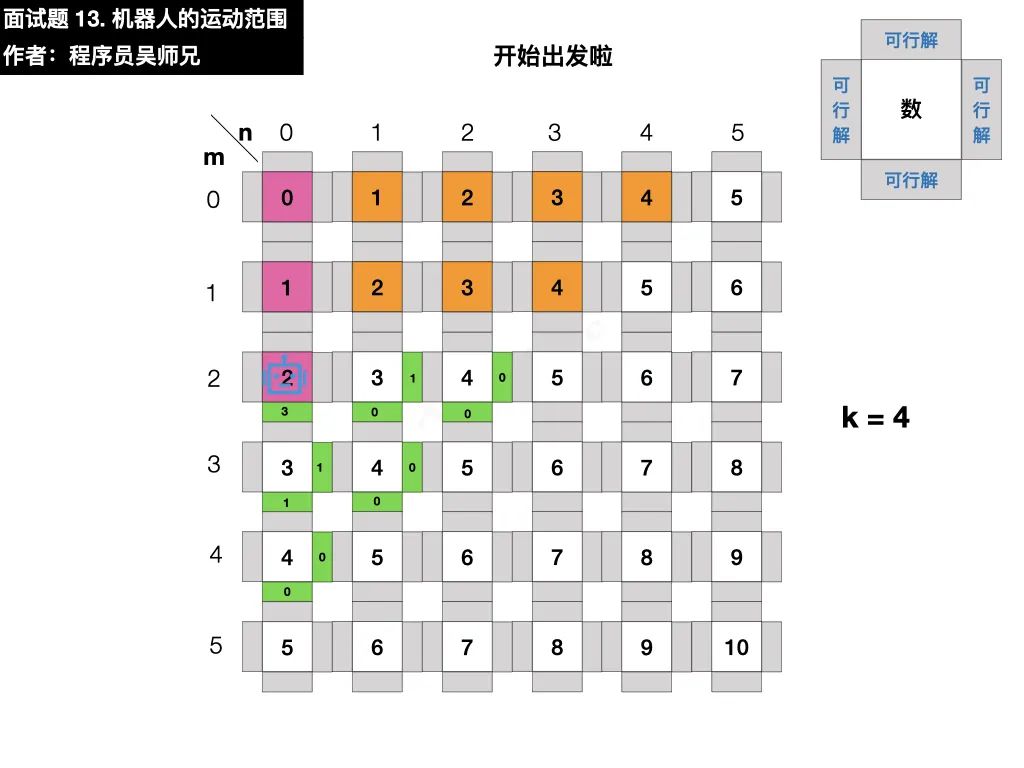
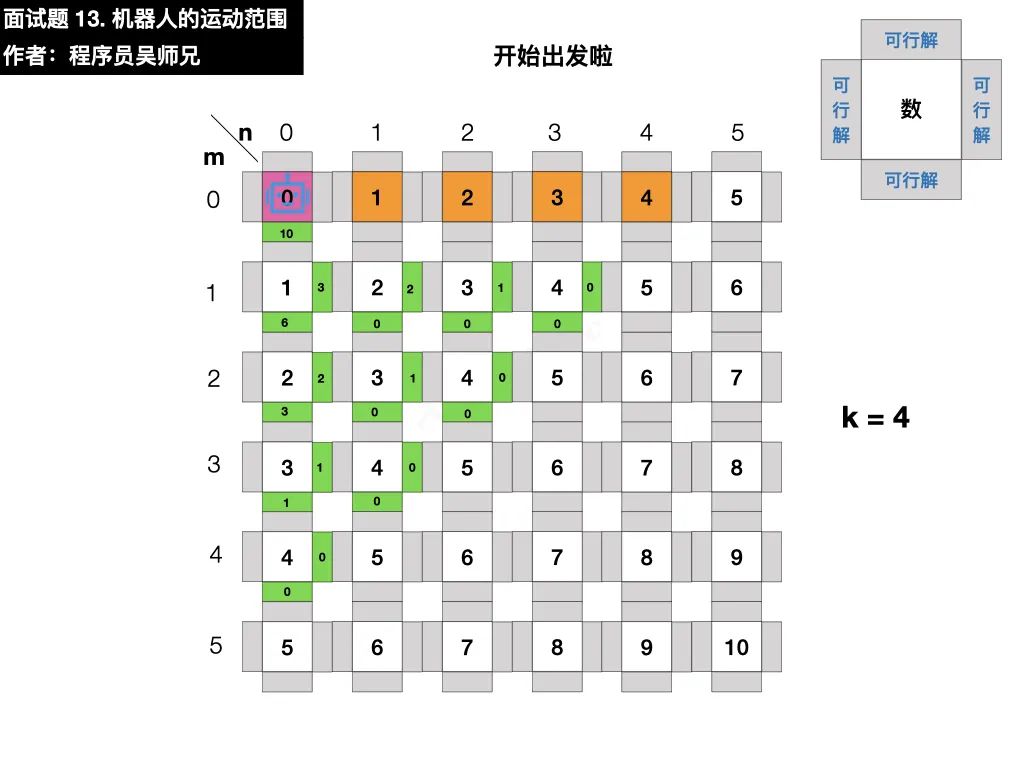
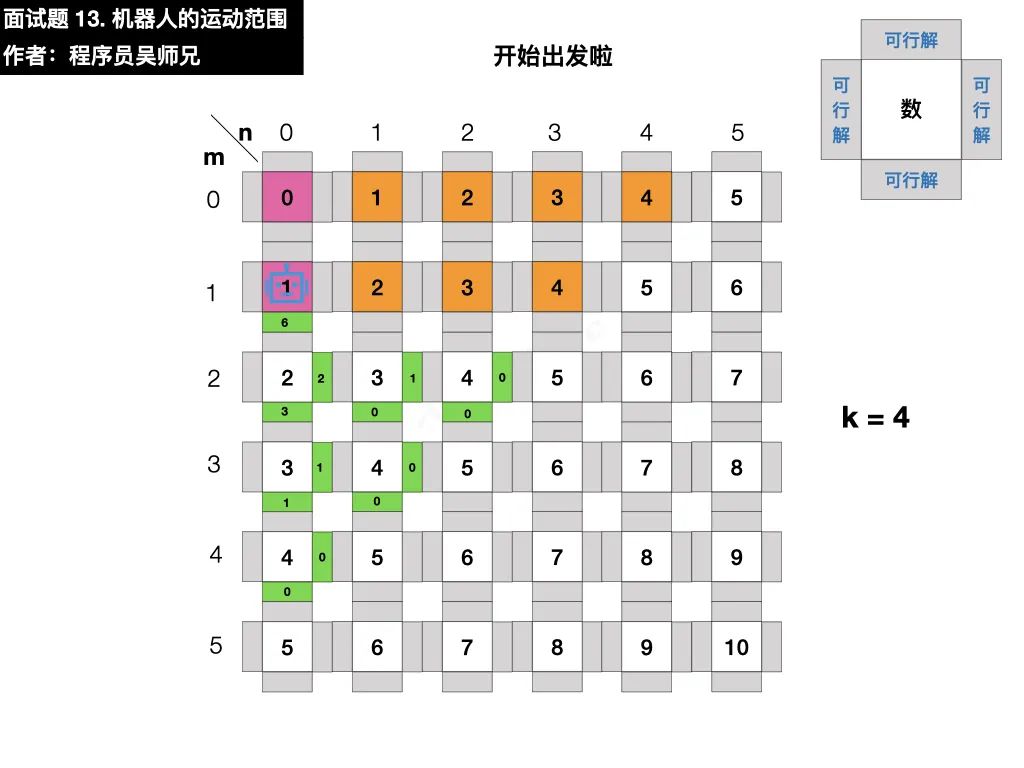
接下来,机器人不断的重复从一个格子出发探索、返回携带数量、清除区域的操作。
 剑指 Offer 13. 机器人的运动范围.029
剑指 Offer 13. 机器人的运动范围.029
 剑指 Offer 13. 机器人的运动范围.034
剑指 Offer 13. 机器人的运动范围.034
 剑指 Offer 13. 机器人的运动范围.037
剑指 Offer 13. 机器人的运动范围.037
 剑指 Offer 13. 机器人的运动范围.039
剑指 Offer 13. 机器人的运动范围.039
 剑指 Offer 13. 机器人的运动范围.043
剑指 Offer 13. 机器人的运动范围.043
 剑指 Offer 13. 机器人的运动范围.047
剑指 Offer 13. 机器人的运动范围.047
 剑指 Offer 13. 机器人的运动范围.048
剑指 Offer 13. 机器人的运动范围.048
 剑指 Offer 13. 机器人的运动范围.049
剑指 Offer 13. 机器人的运动范围.049
 剑指 Offer 13. 机器人的运动范围.050
剑指 Offer 13. 机器人的运动范围.050
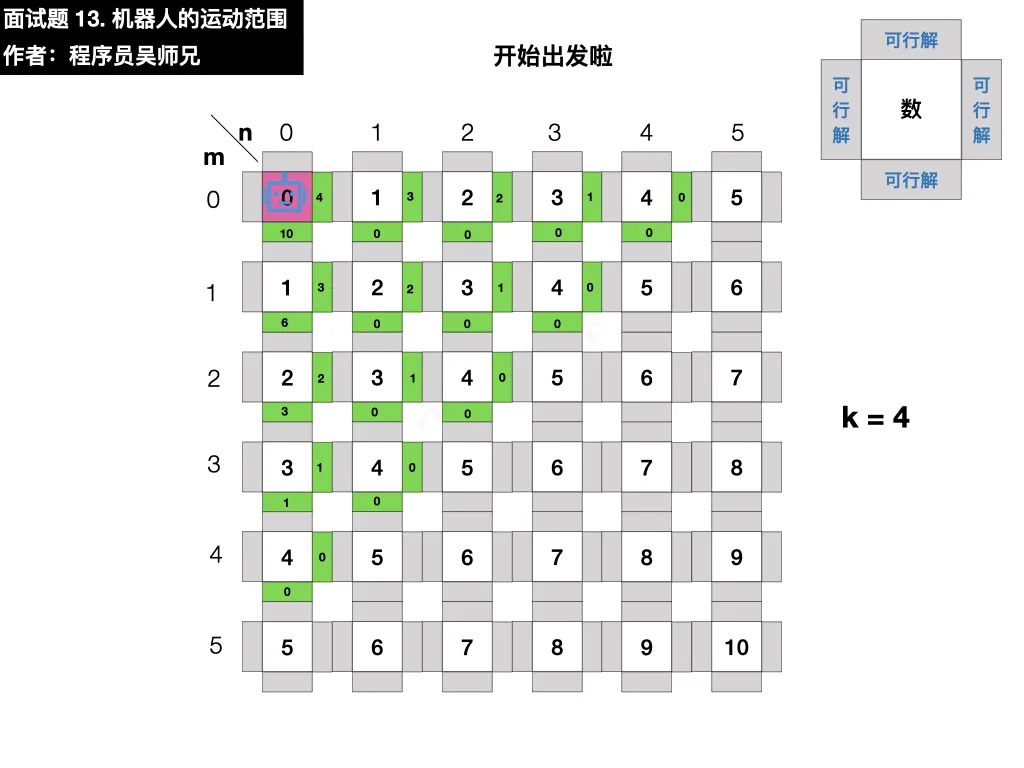
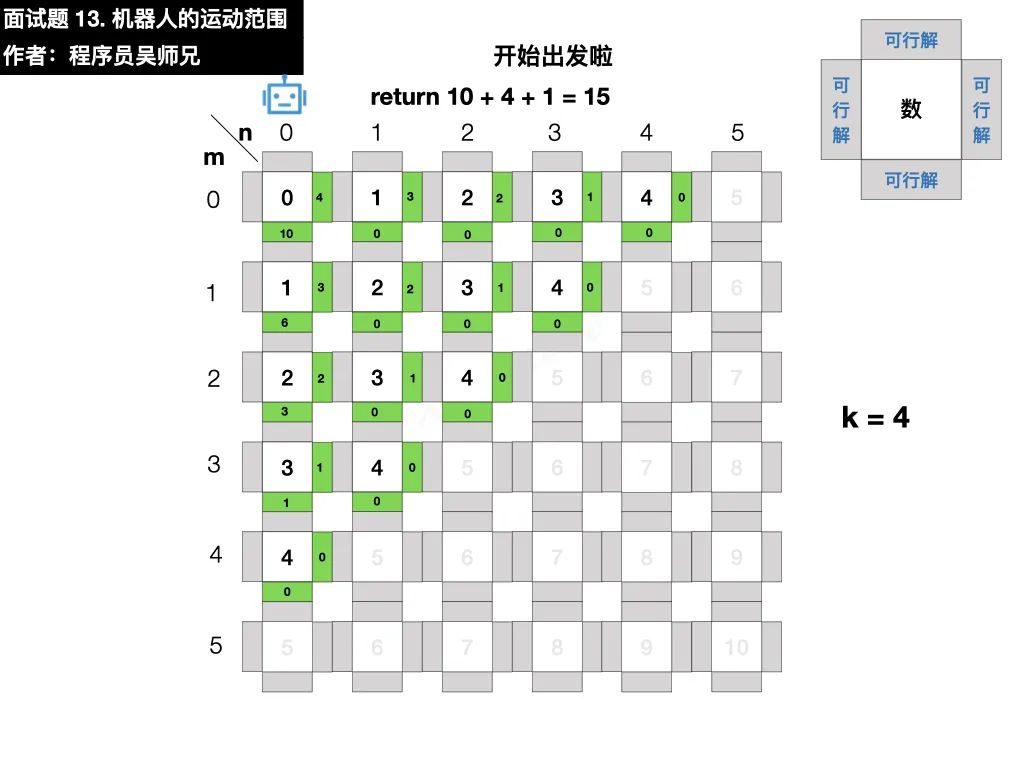
最终统计出,当
k = 4
的时候,机器人可移动到达的格子数量为
15
。
2、规律
在搜索过程中,如果下方格子与右方格子
不符合要求
,则向上或者向左返回上一个格子
3、匹配
机器人先从一个方向出发,直到到达不可到达的区域时才返回,符合
深度优先遍历
的性质。
机器人不断的重复从一个格子出发探索、返回携带数量、清除区域的操作,符合
递归
的性质。
所以,我们可以使用一个数组用来记录符合要求的格子是否被机器人访问过,若没有访问过,则在机器人返回的过程中将结果 + 1。
具体操作如下:(参考自
Krahets
)
4、边界
三、动画描述
四、图片描述
 剑指 Offer 13. 机器人的运动范围.004
剑指 Offer 13. 机器人的运动范围.004
 剑指 Offer 13. 机器人的运动范围.005
剑指 Offer 13. 机器人的运动范围.006
剑指 Offer 13. 机器人的运动范围.007
剑指 Offer 13. 机器人的运动范围.008
剑指 Offer 13. 机器人的运动范围.009
剑指 Offer 13. 机器人的运动范围.010
剑指 Offer 13. 机器人的运动范围.005
剑指 Offer 13. 机器人的运动范围.006
剑指 Offer 13. 机器人的运动范围.007
剑指 Offer 13. 机器人的运动范围.008
剑指 Offer 13. 机器人的运动范围.009
剑指 Offer 13. 机器人的运动范围.010
 剑指 Offer 13. 机器人的运动范围.011
剑指 Offer 13. 机器人的运动范围.012
剑指 Offer 13. 机器人的运动范围.013
剑指 Offer 13. 机器人的运动范围.014
剑指 Offer 13. 机器人的运动范围.015
剑指 Offer 13. 机器人的运动范围.016
剑指 Offer 13. 机器人的运动范围.011
剑指 Offer 13. 机器人的运动范围.012
剑指 Offer 13. 机器人的运动范围.013
剑指 Offer 13. 机器人的运动范围.014
剑指 Offer 13. 机器人的运动范围.015
剑指 Offer 13. 机器人的运动范围.016
 剑指 Offer 13. 机器人的运动范围.017
剑指 Offer 13. 机器人的运动范围.017
 剑指 Offer 13. 机器人的运动范围.018
剑指 Offer 13. 机器人的运动范围.018
 剑指 Offer 13. 机器人的运动范围.019
剑指 Offer 13. 机器人的运动范围.019
 剑指 Offer 13. 机器人的运动范围.020
剑指 Offer 13. 机器人的运动范围.021
剑指 Offer 13. 机器人的运动范围.022
剑指 Offer 13. 机器人的运动范围.023
剑指 Offer 13. 机器人的运动范围.020
剑指 Offer 13. 机器人的运动范围.021
剑指 Offer 13. 机器人的运动范围.022
剑指 Offer 13. 机器人的运动范围.023
 剑指 Offer 13. 机器人的运动范围.024
剑指 Offer 13. 机器人的运动范围.025
剑指 Offer 13. 机器人的运动范围.024
剑指 Offer 13. 机器人的运动范围.025
 剑指 Offer 13. 机器人的运动范围.026
剑指 Offer 13. 机器人的运动范围.027
剑指 Offer 13. 机器人的运动范围.028
剑指 Offer 13. 机器人的运动范围.029
剑指 Offer 13. 机器人的运动范围.026
剑指 Offer 13. 机器人的运动范围.027
剑指 Offer 13. 机器人的运动范围.028
剑指 Offer 13. 机器人的运动范围.029
 剑指 Offer 13. 机器人的运动范围.030
剑指 Offer 13. 机器人的运动范围.030
 剑指 Offer 13. 机器人的运动范围.031
剑指 Offer 13. 机器人的运动范围.031
 剑指 Offer 13. 机器人的运动范围.032
剑指 Offer 13. 机器人的运动范围.032
 剑指 Offer 13. 机器人的运动范围.033
剑指 Offer 13. 机器人的运动范围.034
剑指 Offer 13. 机器人的运动范围.033
剑指 Offer 13. 机器人的运动范围.034
 剑指 Offer 13. 机器人的运动范围.035
剑指 Offer 13. 机器人的运动范围.035
 剑指 Offer 13. 机器人的运动范围.036
剑指 Offer 13. 机器人的运动范围.037
剑指 Offer 13. 机器人的运动范围.036
剑指 Offer 13. 机器人的运动范围.037
 剑指 Offer 13. 机器人的运动范围.038
剑指 Offer 13. 机器人的运动范围.039
剑指 Offer 13. 机器人的运动范围.038
剑指 Offer 13. 机器人的运动范围.039
 剑指 Offer 13. 机器人的运动范围.040
剑指 Offer 13. 机器人的运动范围.040
 剑指 Offer 13. 机器人的运动范围.041
剑指 Offer 13. 机器人的运动范围.041
 剑指 Offer 13. 机器人的运动范围.042
剑指 Offer 13. 机器人的运动范围.043
剑指 Offer 13. 机器人的运动范围.042
剑指 Offer 13. 机器人的运动范围.043
 剑指 Offer 13. 机器人的运动范围.044
剑指 Offer 13. 机器人的运动范围.044
 剑指 Offer 13. 机器人的运动范围.045
剑指 Offer 13. 机器人的运动范围.045
 剑指 Offer 13. 机器人的运动范围.046
剑指 Offer 13. 机器人的运动范围.047
剑指 Offer 13. 机器人的运动范围.048
剑指 Offer 13. 机器人的运动范围.049
剑指 Offer 13. 机器人的运动范围.050
剑指 Offer 13. 机器人的运动范围.046
剑指 Offer 13. 机器人的运动范围.047
剑指 Offer 13. 机器人的运动范围.048
剑指 Offer 13. 机器人的运动范围.049
剑指 Offer 13. 机器人的运动范围.050
 剑指 Offer 13. 机器人的运动范围.051
剑指 Offer 13. 机器人的运动范围.051










