来源:
本文由半导体行业观察翻译自semiengineering
,作者ANN STEFFORA MUTSCHLER,谢谢。
随着汽车制造商推进自动驾驶汽车,自动驾驶汽车的计算工作正在整合,但是这些变化会对行业造成巨大破坏,一个多世纪以来都是如此,供应链一直在调整。
整合是至关重要的,原因有很多,包括计算效率、复杂性管理,以及降低成本等等。虽然对于PC和智能手机市场而言,这似乎是自然的进步,但这对于汽车OEM及其供应商而言却是全新的游戏。
汽车行业多年来一直在谈论对于ECU(汽车电子控制单元,又称“行车电脑”、“车载电脑”等)整合的需求。但讨论通常都集中在物理空间、银盒的成本、ECU的重量,以及将它们连接在一起所需的接线长度。
ARM嵌入式营销副总裁Richard York表示:“从广义上讲,整合是由成本、灵活性、能源效率,以及不断发展的网络架构所驱动的。将功能整合到更少的ECU中,简化了车辆中的控制器网络,有助于不同系统之间的通信。它包含不断增加的复杂性,并且通过减轻汽车重量来减少能源消耗。随着更多车辆引入ADAS(高级驾驶辅助系统)和自动驾驶硬件,我们对于计算性能和通信速率的要求也在提高。”
问题是如何做到这一点。 到目前为止,尚未有达成一致的方法。尽管汽车制造商会在未来四年内让自动驾驶汽车上路,但仍然有许多工作正在进行中。
多少个大脑?
Cadence公司Tensilica产品营销高级总监Steve Roddy说:“有一类的设计方法,通常由新平台或新兴汽车公司所驱动,此处,整合者——即实际的汽车公司,他们希望将所有ADAS软件和所有功能安全认证集成到主CPU中,一切都围绕着一个巨大的大脑。有一种补偿方法,宣称多个独立的智能系统应该保持隔离,使得视觉处理可以在相机、雷达、或激光雷达所在的位置完成。更高级的命令被发送回中央处理单元,中央处理单元更多的是充当决策者,充当数字处理器是次要的。”
汽车电子控制单元(ECU)传统上是围绕汽车中的机械功能构建的,例如发动机控制、制动、或信息娱乐等。但是随着汽车自动化程度越来越高,为了安全起见,这些功能需要整合。
Synopsys高级战略营销经理Ron DiGiuseppe表示:“目前的架构是每个ADAS应用都有自己的ECU。所以,当你离开自己的车道时,车道偏离警报会响,这里有一个ECU。当前方碰撞时,你会听到警报,这里也有一个ECU和一个应用程序,如自动紧急制动,可以检测到碰撞发生,并为你制动。辅助停车有一个ECU。盲点识别具有单独的ECU。每个ECU都有自己的模块和自己的ADAS处理器,非常分散。这就是行业如何实施更高层次的OEM架构。”
所有这些分布式ECU都有不同的自动驾驶网络。其中很多使用传统的控制器局域网络(CAN),对线束的影响是使得汽车上有很多点对点接线。这点十分重要,因为线束的重量在汽车中排名第三,仅次于框架和动力系统。目前的接线长度达几公里长,为了整合这些不同的模块,汽车网络必须转向更先进的技术。目前的先进技术是以太网音频视频桥接技术(AVB)和以太网时间敏感网络技术(TSN)。
DiGiuseppe说:“将所有这些单独的ECU集成到更现代化的网络中是很好的,并且将这些ECU集成到组合功能中是下一代架构的挑战。我们看到了行业的趋势,你可能会看到前方碰撞预警ECU与自动制动ECU的融合,因为它们都在做类似的事情,可以用一个统一的模块取代不同的网络上相互独立的ECU。我们会看到这些分布式ECU集成到更集中的ECU中。”
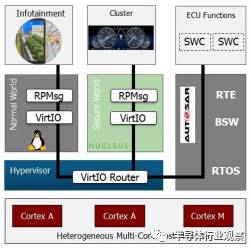
图1:ECU的整合。 资料来源:Mentor Graphics
与此同时,Roddy指出,汽车OEM厂商的情况并不明确。“这里不会出现崩溃。你可以说,传统汽车公司这样做,新兴汽车公司那样做。最简单的说法是,电动汽车/自动驾驶汽车创业公司都在做集中式的版本,而传统公司在做纯粹的分布式。目前倾向于向前者倾斜,但并不完全是这样。两者都有利弊。首先,平台制造商必须决定是否需要在车内运行多个千兆高速网络。有些人认为这是非常完美,他们计划把千兆以太网应用到汽车级别,他们计划将许多高清视频资源和高数据速率的雷达资源送入一颗巨型CPU。还有人认为这会引发灾难。因此,这可能是一些人的主要决定因素,无论他们是担心,还是拥抱汽车周边的大型高速数据网络。”
Roddy还强调了集成复杂性的问题,特别是如果汽车制造商从一级供应商那里获得了集成的视觉/雷达接近警报系统。“从某种程度上说,拥有专业化的劳动是有价值的,因为并不是每个汽车公司都希望把所有系统的所有知识整合在一起。”
汽车中的ECU数量继续以惊人的速度增长。这部分是由于复杂性的增加,但也有部分原因在于电子和软件设计对于汽车OEM而言是全新的。
Mentor Graphics嵌入式系统部副总裁兼总经理,Mentor Automotive领袖Glenn Perry表示:“每当他们想要新功能,他们的供应链工作方式就是在纸上描述功能,并将它们转包到第1级代理来构建。它又导致了车辆的另一个模块。然后,模块承担了自身的命运,事实证明,从技术上说,在将这些功能整合到更少的模块中对其能力没有任何实际的限制。”
Perry指出,航空业几十年前经历了787和其他先进飞机的整合。限制汽车领域整合的是组织结构,从OEM到采购以及工程领域的一级和二级代理。
Perry说:“基本上,有一组负责集群或驾驶信息,还有一组负责IVI(车载信息娱乐)。 而且二者都不想放弃对于另一方的主导地位,所以它们一直滞留在孤岛。然而,我们几年前所经历的是,中国的OEM厂商表示并不介意组织中的人是否因这些组织的崩溃而敏感。他们要前进和整合。”

图2:不同的空间。 来源:梅赛德斯奔驰
每个级别都需要更改
当然,ADAS的整合变得越来越重要,尤其是ADAS的最高水平。Perry说:“与此同时,OEM在提供自动驾驶能力方面面临巨大的压力,而且一个世纪以来从未有哪个行业面临过如此严重的威胁和破坏。 如果OEM不明白这一点,那么他们就会遭到科技巨头公司的竞争。有许多初创公司可以进入电动汽车平台,以及汽车公司。同时,OEM的定位不是很好,因为他们一直依靠电子和软件的一级供应商。但是,这使得OEM可以成为自动驾驶领域的系统集成商。”
此外,无论ADAS的功能如何,在架构上它们都以相同的方式工作。
佩里说:“基础是基于分布式计算架构。在自适应巡航控制的情况下,例如,有一个雷达,它是实际的传感器,生成原始数据。 然后在同一边缘传感器节点内的原始数据使用处理引擎(微处理器或微控制器)进行处理,然后通过汽车总线将数据的子集传输到实际的ACC模块,另一个处理器进行进一步分析,并对数据进行操作。最后,它提供安全控制器通过CAN总线进行通信的信息。通信将通过集群发给驾驶员一些警告,或是一些音频警告,以及刹车、加速、转向控制。无论是相机、雷达、还是激光雷达,都是如此。从根本上说,我们在边缘节点上进行一些处理,其中一些就在控制模块中。”










