这两天,一个中国研发的气动软体机器人夹具备受关注
大家看一下下面这张图
抓取仙人掌(看着都疼)
↓↓
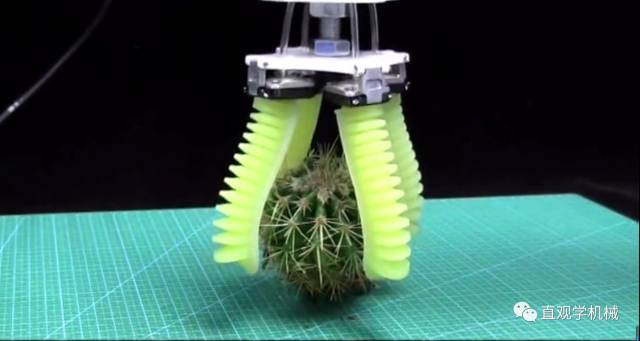
传统夹持装置与抓持对象之间一般是刚性接触
难以实现对易碎物品的抓取
如果设计出一款柔性抓持器
单一爪手即可以抓取不同尺寸、形状和重量的工件
那么这个想法是否就颠覆了传统刚性抓起的概念呢
看一下下面这个视频(建议在wifi下欣赏)
↓↓
这是来自北京软体机器人公司的抓取技术,它不同于德国费斯托公司吸取式抓起的概念。
德国
费斯托吸取式气动机械手
↓↓

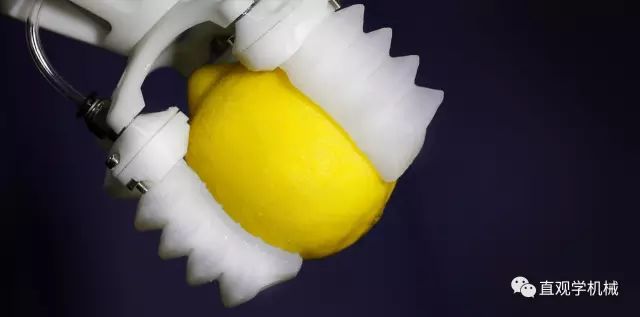
北京软体机器人的目标是将智能自动化引入了传统机械爪手难以适用的抓持目标不统一的领域。抓取易损、易碎的不同物体。
抓取螃蟹
↓↓

抓取柠檬
↓↓
抓取粉丝
↓↓
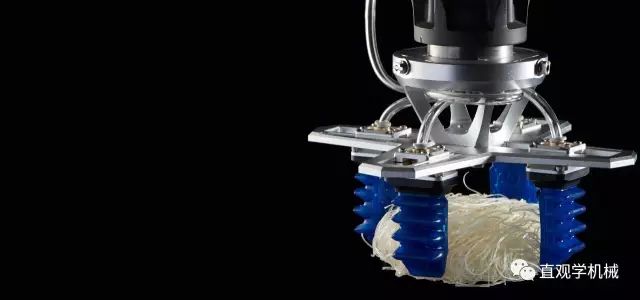
什么肉类、葡萄、草莓都可以胜任,简直是颠覆性的抓取。
下面看一个升级后的软体机械手视频
↓↓
最可喜的是
这种气动机械夹具完全可以用在自动化生产线上
重复定位精度达0.1mm
可实现对物品准确无误的抓放
抓取洗发水包装
↓↓

这种夹爪采用通用连接法兰的设计,可实现不同类型爪手简单、高效地更换,通过SRT控制器可实现气管即插即用。抓持部件设计一体成型,极大降低故障率。维护上不需繁复的定期保养,只需卸下来用水冲洗即可。

这种气动软体机械手夹具已经申请了专利,并开始投入生产应用,祝贺这家中国公司,希望在以后的若干年能看到生产线上忙碌着更多中国研发的机械手。。。
来源:直观学机械整理;
资料来源:北京软体机器人公司,版权所有
阅读原文,更多热门;扫码识别,关注“机器人网”






