摘要
为高效评估小型无人机对复杂地形区域侦察航路规划的合理性,提出采用STK( System Tool Kit,系统工具箱)软件对无人机(以美国RQ⁃7B“影子”无人机为例) 侦察效果进行评估分析。首先,对目标区域实现完全区域覆盖及链路畅通条件进行理论分析;其次,利用STK 软件计算分析无人机传感器对目标区域覆盖的特性,评估无人机与地面控制站的通信效果。仿真结果表明,STK 可多角度分析、评估航线规划效果。计算结果准确、展示效果直观、操作简单快捷,可用于评估分析复杂地形条件下无人机航线规划方案的合理性,为无人机航线规划优化提供可靠有效的数据支撑。
在近现代战争中, 无人机( Unmanned AerialVehicle,UAV)作为一种重要的侦察力量,已被越来越多的国家应用于战术侦察、战场巡逻和特种目标攻击等任务,特别在反恐、维稳、特种作战、搜寻等特殊侦察、监视任务中,小型无人机侦察相较于传统侦察手段具有极大的优势。
传统无人机侦察航线规划实质是在地形地物、环境威胁和技术指标等多约束条件下,使用航线规划算法,计算得到满足任务、导航通信和自身安全的最优航线。随着航段的复杂度变化,航线的逼真度也不断变化,这使得任务操作员感知理解难度增加,且绝大多数算法合适飞行高度高,威胁单一的情况,不适应小型无人机低空飞行航线规划评估分析。
本文采用STK 软件(System Tool Kit,系统工具箱)对小型无人机对复杂地形侦察效果进行仿真分析,评估无人机航线规划方案合理性,为反恐、维稳、特种作战方案无人机侦察系统航迹规划、通信方案设计与优化提供可靠的数据支撑。
STK 软件是美国AGI 公司开发的一款在航天工业居领先地位的可视化、组件化仿真分析软件,能够快速、全面地支持对复杂陆、海、空、天、电一体化仿真推演和分析评估应用,覆盖航空航天、空间环境、卫星、雷达、通信、导航、电子对抗、导弹、舰艇、飞行器等领域,并提供易于理解的图表和文本形式的分析结果,以及高逼真度的空间可视化呈现;通过过程推演和精确分析计算,能够为用户关心的研究问题提供直接、定量和直观的分析数据,辅助用户完成体系设计、任务规划、态势分析、作战能力、效能和威胁评估等任务。
本文以美国RQ⁃7B“影子”无人机为例,首先,对无人机实现完全覆盖目标区域,以及无人机和地面控制站之间通信链路畅通基本条件进行分析计算;然后,采用STK 软件仿真无人机不同飞行高度条件下对该目标区域进行侦察的过程;同时,利用STK 软件的覆盖特性计算模块分析无人机传感器对目标区域的覆盖特性,利用STK 软件的通信计算模块分析无人机与地面控制站通信效果 ,以验证评估复杂地形条件下无人机航迹规划方案合理性,为无人机航线规划优化提供可靠的数据支撑。
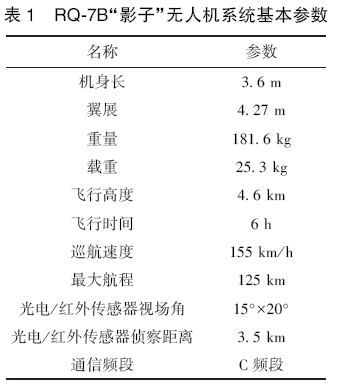
RQ⁃7B“影子”无人机系统由美国联合工业公司防务分公司生产,能够为战术机动中的战场指挥官提供近实时、高精度、可持续超视距侦察、监视、目标获取、战斗毁伤评估和作战管理功能的小型战术无人机。该型无人机主要配属美国陆军的旅级部队,也是第一种经由美国军方正式批准进行批量生产的小型战术无人机系统。RQ⁃7B“影子”无人机系统包括2 个地面控制站、4 架无人机、4 部遥控视频终端和天线、1 辆无人机运输发射车、2 辆人员/ 设备运输拖车[4] 。无人机基本参数见表1。
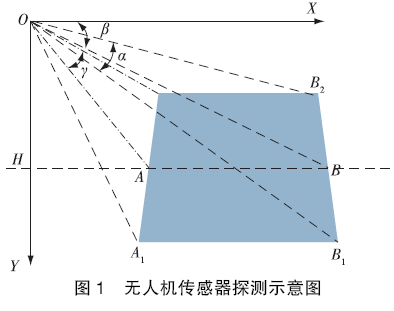
RQ⁃7B 无人机CCD 的瞬时视场范围与CCD 传感器的视场角、俯仰角、无人机的飞行高度和姿态相关,如图1 所示,设无人机飞行高度OH 为h,O 点为CCD 传感器,OX 为水平轴,OY 为垂直轴,∠BOX 为CCD 光轴与无人机中轴形成的安装角,用β 表示,CCD 传感器为长方形视场,左右视场角为α,前后视场角为γ,则无人机平飞时,CCD 传感器对地覆盖范围形状为梯形,A′A″为短边,B′B″ 为长边,AB 为梯形高,则

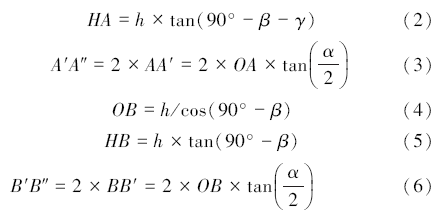
则CCD 传感器对地覆盖面积为
可见,在无人机视场角和安装角度确定的情况下,其侦察范围仅与飞行高度相关,飞行高度越高,侦察范围越大,但是受传感器性能和目标尺寸的限制,飞行高度高,成像质量会变差,地面操作人员可能无法对侦察图像进行有效的目标识别,需要根据任务不同,目标尺寸大小确定最优的无人机飞行高度,在确保成像质量的情况下,获取最大的覆盖范围。
为了保持地面对RQ⁃7B 的控制,RQ⁃7B 应始终在地面站的通信范围内。侦察图像信息所需通信带宽由侦察图像分辨率、图像格式、帧速率以及图像压缩率决定,若采用RGBA 格式,则图像信息传输速率计算方法为

其中,Rb 为图像传输速率,PI 为图像分辨率,Z 为帧速率,C 为图像压缩速率。
则通信链路的裕量为
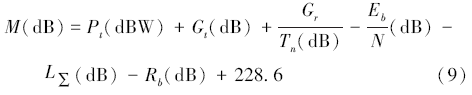
其中,M 为链路裕量,Pt 为发射功率,Gt 为发射天线增益,Gr/Tn为接收机品质因数,Eb/N 为给定误码率要求的接收机信噪比门限,LΣ 为其他链路损耗和,Rb 为数据传输速率。
若通信链路裕量能够满足安全通信裕量,即

其中,Psafe 为实际工程应用安全裕量。
根据无人机CCD 传感器覆盖面积,初步计算无人机飞行航线,形成基于时间轴的无人机航线,若航线不能满足安全通信链路要求或无法满足通视要求,则需采取相关措施进行改善, 如增加通信无人机进行中继。
首先设置STK 软件仿真时间,二、三维场景显示等相关参数;其次根据无人机侦察任务,形成基于时间轴的无人机航线任务脚本;插入飞行器对象,根据航线脚本和侦察目标区域编辑飞行航线;插入传感器建立光学传感器对象,按照RQ-7B 无人机相关载荷参数设置,搭建地面指挥控制站,设置接收机参数;然后插入“覆盖性分析”对象,建立可见光侦察载荷与目标区域的对应关系。
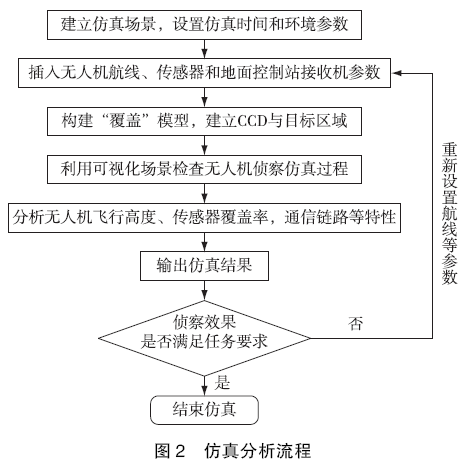
STK 场景设置完毕,即可利用STK 对目标区域进行扫描分析计算,查看仿真结果,分析无人机飞行高度、传感器覆盖率、通信链路等特性是否满足任务要求。仿真分析流程如图2 所示。
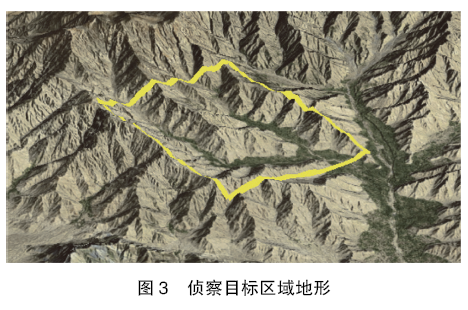
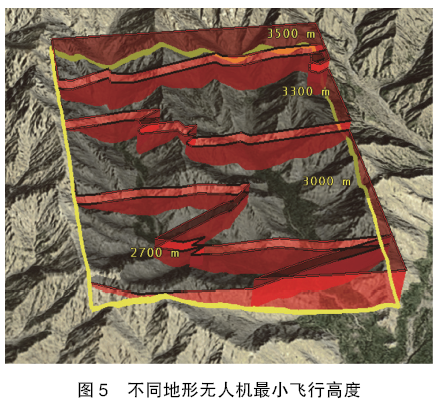
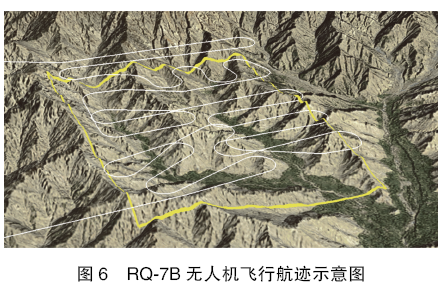
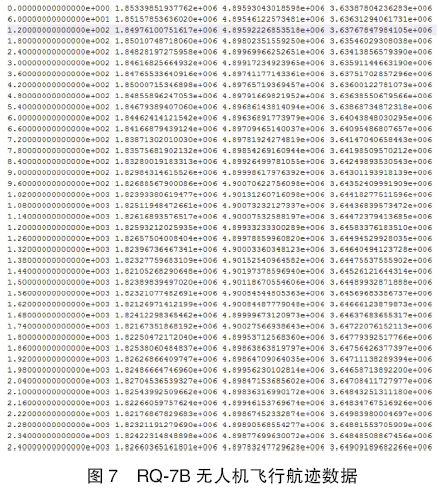
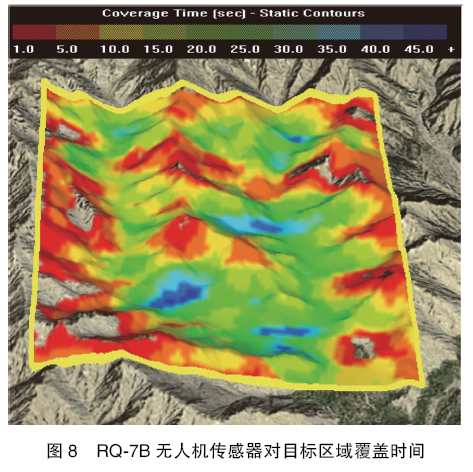
本文以RQ⁃7B 无人机对某目标区域如图3 所示(约58 km2)执行侦察、监视任务,在附近城市空旷地建立无人机控制站,整个无人机任务规划的对象结构如图4 所示,并输入RQ⁃7B 无人机载荷参数。利用STK二、三维可视化态势展示的特点,给出无人机不同飞行航段的飞行高度,每段飞行最低高度如图5 所示,随着地形的起伏,无人机飞行高度需从2 700 m,逐步爬升至3 500 m。然后结合第2 节飞行航线计算方法计算RQ-7B 无人机航线,如图6、7 所示。利用STK 覆盖特性分析,可以计算得到无人机对目标区域各个点的覆盖时间(见图8)以及无人机相对于目标区域地表的高度(见图9)。

 、
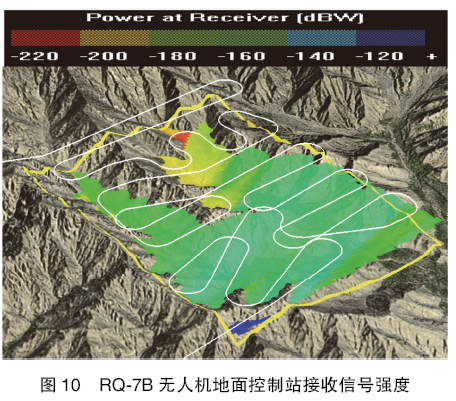
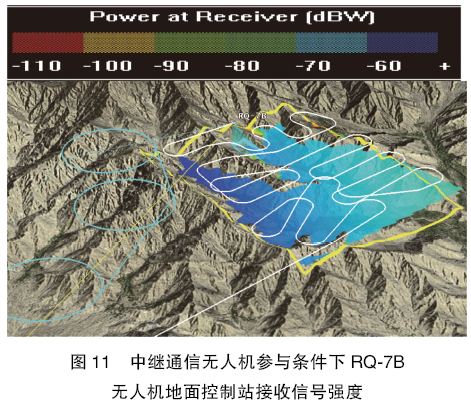
、

为保证地面站对无人机的控制和图像数据的正常下传,利用通信计算模块,可得到地面站接收无人机侦察数据信号的强度,分析是否满足RQ⁃7B 无人机信号传输的安全通信链路要求。如图10 所示,地面控制站与RQ⁃7B 无人机直接通信时,地面控制站接收机接收的信号强度较弱,难以满足RQ⁃7B 无人机通信链路裕量要求,这时如果在侦察目标区域增加通信中继无人机,则地面控制站接收的信号强度如图11 所示,通信效果提高明显。