
来 源
|
雷锋网(ID:leiphone-sz)
作 者 | Brad Nelson
整 编 | 张驰

雷锋网按
:7月7日,中国计算机学会(CCF)主办,雷锋网与香港中文大学(深圳)承办的第二届CCF-GAIR全球人工智能与机器人峰会在深圳如期开幕。在大会第三天的医疗人工智能专场,苏黎世联邦理工学院(ETH Zurich)的教授Brad Nelson做了大会报告。
他的报告从科幻中的机器人讲到了已经实现的微型机器人,并就其实现原理及应用作了深入的分析,同时展示了其研究所的诸多微型机器人研究成果。他认为未来的医疗机器人一定有微型机器人一席之地,但这种过程并不轻松,期间还面临着诸多挑战。
以下内容由雷锋网整理自Nelson教授的报告,有删减:
今天我想和大家共同探讨一下柔性机器人,特别是它的微型应用。
我和在苏黎世的30个合作伙伴,从机器的角度,包括从材料、医学的角度共同合作,他们来自不同背景,一起解决目前手中棘手的手术难题。在基础角度我们会研究微型物理的作用,比如力学、机械生物学,与此同时开发微型机器人。更重要的是我们开发了以磁力驱动的机器人。最后一部分是材料。
今天我会介绍一些研究成果,同时讲一下物理方面的进展,以及如何建立小型机器和使用磁驱动的方式驱动机器人。
1.微型机器人:一次人体旅行

微型机器人对未来的医学有很大的影响。讲到医疗,大家可能会看到像上图这样的,来自好莱坞电影中的机器人,它是完全自主的,像一个宇宙飞船,在人体进行手术。这是未来一个想象。科学家已经研究微型机器人大概30多年了,机器或者机器人会影响我们这个时代的医学,未来机器人能够给患者开药自动诊断。现在有系统和机器在人的身上做一些简单的手术,未来会有机器人自动做手术,这也需要计算速度以及大数据方面的支持,尤其是诊断方面。
现在世界上的医疗机器人很多,而且在15年前人们就开始在思考,下一代的机器人,尤其是下一代医疗机器人将会是什么样。
我们考虑的出发点是微型,就好象第一张图片里好莱坞电影中机器人一样。这是1966年一部电影中出现的机器人,它可以缩小并让一个科学家藏在其中,通过内部的传感器了解周围的环境。它的体积非常小,能被吞咽到体内。而今天这个场景是可以实现的。
我觉得好莱坞已经比科学界先进很多了,但他们不用考虑现实情况,也不用考虑如何去制造,用什么材料。对科学家来讲这个问题很更难了,尤其是工程师,要考虑制造、机械、潜力,对社会大众产生的好处,商业化和落地。另外还要考虑市场上哪些疾病是由医疗机器人可以承担的,如果没有这些,科研就是毫无意义的。
2.如何构造微型机器人?
接下来讲机器人的构造,尤其是如何做微型机器人。我们不能像小说里一样让机器人被吞咽到人体内,我们要讲的是用什么材料。所以先讲讲它的物理构成。
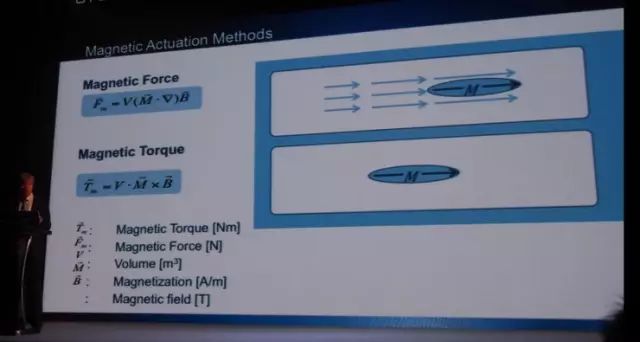
这上面有两个公式,第一个是磁力,我们必须在微型机器人上增加一个磁张力,它才能进行吸附。另外,还要通过改变微型机器人的构造,使它增加力量或者减少力量,还希望这个机器人能进行旋转。
根据这两个公式创造出的机器人的物理公式,不光能够进行力的增加和减少,而且能进行自由的360度翻转和旋转。
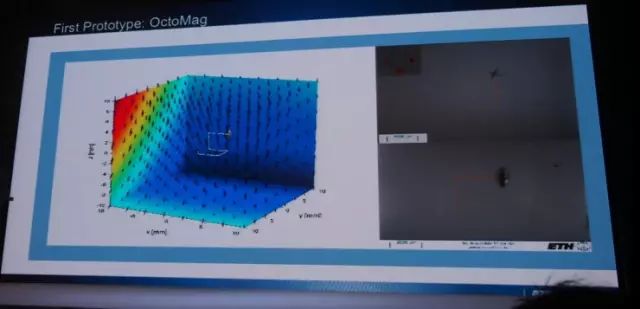
2009年的时候我们用八个比较常用的磁铁驱动的医疗设备,看一下在三维工作场景中如何控制机器人的走向和力的大小。这个技术也是我们首先提出开发并且应用的。
3.微型机器人的应用
如果已经有了公式和能力控制微型机器人,接下来的问题是在医疗行业这种小型机器人有什么好处。
首先看一下眼睛上有什么样的疾病。一般的疾病都是用肉眼从外部观察到的,但有一些在过去十年没有取得任何进步。现在则可以做到用一个微型机器人,在眼睛中观察其内部构造,并且看有什么样的疾病。我们发明了一个新的设备,它非常非常小,只有零点几毫米,如果你把它放到眼睛上然后拿出来,它不会造成任何影响。
从微型机器人角度出发,我们还想发明一些能穿透血管的机器人,把它用在动物身上进行实验。通过它们在血管里的走向,找到疾病到底发生在哪个地方。
再看一下在体内发生的情况,有时候人们认为他们的心脏或者胃出了问题。多年来有很多人呼吁用微型机器人协助外科医生做手术。如果讲到心脏,里面有很多血管。如果能用一些微型机器人,这个机器人能有一套自系统能够帮助我们去控制手术的进程呢?
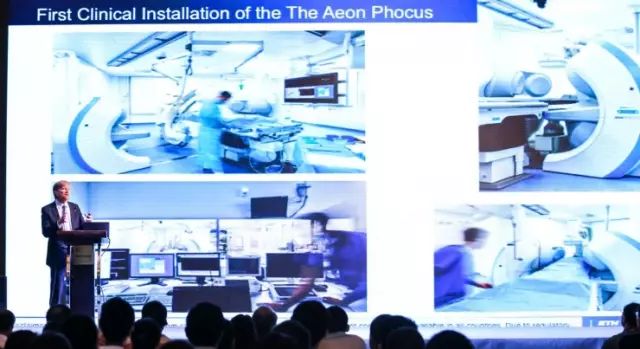
我们开发了一个系统,病人可以躺在这个系统中,医生可以通过手里的微型设备看患者的心跳、血流速度。同时,一个医生或者护士协助病人描述自己体内的疾病情况。这种微型的体外设备进入到血管以后,因为有上面连接的磁力,所以能够把信息传回到机器人的大脑。系统中的导管进入到体内,就发现肿瘤的位置。
左上方可以看到我们把两个系统前端设备和后端设备连接在一起然后进行手术。右边的下图,整个过程中外科医生能通过机器人协助控制手术进程。
手术有两部分,第一要精确的从外部控制进入到病人体内的机器人导管。第二,当我们在移动导管的过程中,能够进行完全的控制。

在接下来这张图片里,给大家看一下在真正的病患身上做的第一个成功的实验。左边是通过病人超声波导图看疾病情况。在右边的图上方,能够看到心脏里的图像,能够看到他不适的地方是哪,在哪个地方进行精确的实验和手术。医生看着传回来的图像,就把体外设备放进体内一直到心脏的部分。
导管很软,同时非常灵活。我们可以让它以高清晰度看到心室和心室前端的所有图像。我们可以控制微型机器人,让机器人控制导管。通过这个技术,我们做到的不止是对于导管,特别是心导管的操作和控制。最近也把它使用在其他部分,比如进入到胃的底端,可以很清楚的进行胃的检查。更重要的是,平时想要进行胃肠镜的检查,最难是进入到小肠部分。我们现在和香港的医生共同合作,实现了一个6米长的磁导性的导管,可以实现30分钟体内移动。
4.多形态的微型机器人
下面看一下软性机器人。它在过去5-10年非常受欢迎。这类有使用比较柔软的高分子材料制造,还有以生物为导向的技术和材料生成,我认为这也是未来机器人发展的领域,也就是所谓高软性机器人。与此同时,大型软性机器人是否可以做小,做到特别微型,比如能够帮我们做到缝细胞。
在我们把机器人做得越来越小的过程中,物理特性会发生改变。我们还使用磁场,但是磁场的使用在微型量级就不能是同样的物理属性。自然给了解决方案。在1973年我们才真正了解到细菌有自旋的机制,这是非常有意思的运动机制。这种运动机制,让我们能让微型机器人模拟大肠杆菌或者其他菌体运行。
现在开发的人工菌体,它的鞭毛非常小,同时是双旋的结构,能在液体中自由流动,可以通过磁场进行非常精准的操作。我们做了一些更小的微型机器人,和人的毛发相比,它大概就是15-20微克,大概是红细胞的大小。我们现在做的非常小的柔性机器人,同时可以在各种液体还有高分子的链当中都进行使用。
2012年的吉尼斯世界记录也记录了ZTH的最微型的机器人,现在我们还在不断的缩小机器人的尺寸。
在开发了机器人之后,不仅仅要关注它的运动,也希望它能带来有效的应用。过去几年我们一直在想如何用机器人进行给药,专门针对身体的某一个病灶进行。
我们把机器人使用特殊材料包覆,上面有单独的DNA,这DNA上带着黄色荧光蛋白。我们所做的是,让小的柔性微型机器人与人的肾脏细胞进行结合。我们看到,细胞会攫取了机器人携带的DNA,上面有荧光蛋白,我们就可以了解到细胞的转染,同时更好的了解这些细胞的基因表达。
微型机器人还可以做其他的应用,比如,有没有办法能够对药物进行精准的控制,是否使用形状变化的物体来进行药物控制。比如说水凝胶,它在温度变化时就会发生相应变化。我们几年前开始做一种实验,探讨是否有一种机制,能使用磁场的方式进行药物温力的控制。如果打红外线,就可以让水凝胶进行加热,它最终可以释放出有效的药物分子,在体内进行精准的药物给药。
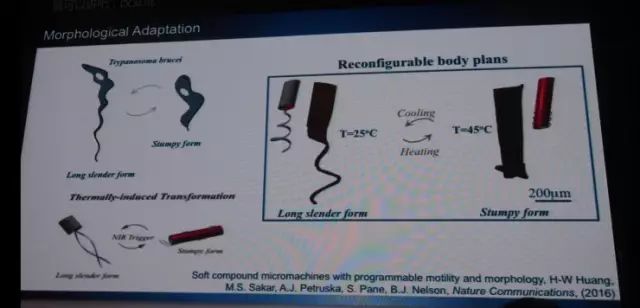
在我们进行研究的过程中,我们发现做的不仅仅是针对机器人的使用,也在探讨自然,在自然界中有不同形态的微型生物体。这是在过去几年我们发现的不同细菌形态和细胞形态。有一种寄生虫它有不同的形态,它从苍蝇进入到人体,会造成睡病。它有一个非常有意思的形态,可以在人的身体内实现尽情的流动。当它达到某一个生命的周期,就会出现体内沉睡,然后生存,再不断复制本身的细胞,再次开始全新的生命周期。
我们不希望机器人这样做,但觉得可以学习这种机制。自然界有很多微型生命体,它们有不同的形态,我们就在想,微型机器人是否可以做到这一点。
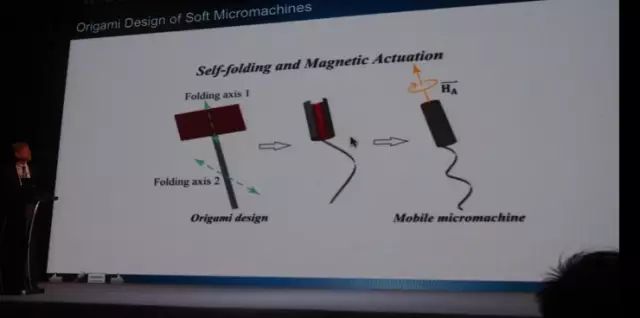
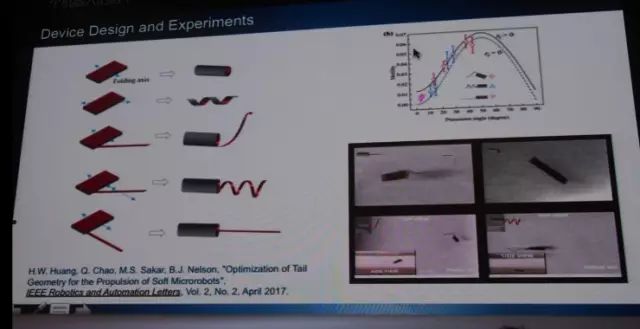
微型机器人可以在形态学上有改变,或者可以改变自己的形态。比如在温度的变化下,调节它们的形态变化。这种变化能不断的优化设备,让它们达到更好的移动性,让它们更好的实现高速度的运动,或者可以实现像寄生虫或者一般病菌移动的过程。
从我们的角度来说,这样可以开发技术来实现各种形态的机器人操作。可以控制它们的行为,找到最好的移动点。
除此之外,我们也在探讨如何把微型机器人用于导管还有内窥镜技术,从而帮助我们更好的了解,如何通过磁场的方式实现导管可灵活性的使用和导入,或者用小的导管就可以实现微型手术,使用内窥镜就可以实现小肠的窥探。
微型机器人可以帮助我们了解如何设置导管和材料。我们现在能够实现初步建模,了解不同磁场之间的作用,能实现导管在结构上的形态变化,而不再使用传统的内窥镜所使用的导管。这从临床角度说是可以实现的,现在市场上已经有了两个系统可以出现磁导管,可以帮助我们了解到,使用导管时在体内发生不断的形态变化,帮助我们做给药或者对纤维的控制。
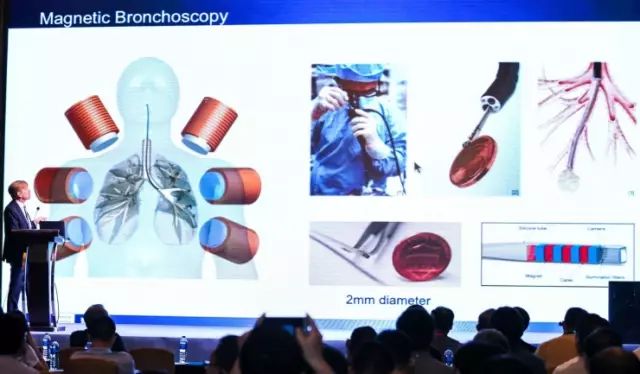
最近我的一个博士生正在使用非常小的磁的支气管镜检。他使用的是非常好的磁场检查,非常小的支气管镜,使内窥镜进入到支气管底部。它是非常小的导管,直径只有2微米,可以进入体内看肝细胞是否出现任何癌化的过程,并且抽样进行活检。
我了解到,中国的肺癌是很严重的疾病,而我们做了很多工作,希望推动肺癌的治疗。用微型机器人能够进入到肺的底部,比现在内窥镜进入的维度还要深得多。









