
文:李基祥,来自:亿欧
自动驾驶汽车似乎还依然存在于科幻电影中,但殊不知,其实它的产业链上下游已经出现支撑公司,并在逐渐走向成熟。
自动驾驶分级标准
关于自动驾驶的分级,主要有SAE(美国机动车工程师学会)标准和NHTSA(国家公路交通安全管理局)两个标准;目前,前者受到大多数业内人士的认可,它从Lv0-Lv5将自动驾驶依据控制方式和适用环境分为了6个等级。

自动驾驶行业的最终目标,必然是实现真正的无人驾驶(Lv5),而实现的方式主要分为两种思路:①从Lv0逐步过渡到Lv5,通过整合集成ADAS中的控制功能,实现真正的无人驾驶②直接从Lv0跨度到Lv4,在特定的垂直领域和相对封闭的环境中推进无人驾驶,再向Lv5,也就是全环境全路况的无人驾驶普及。
根据SAE分级,不难看出,从Lv4开始,真正的控制者由人开始转为自动驾驶系统,责任主体也随之转移。因此,在设计研发之初,ADAS之中的辅助驾驶功能就与无人驾驶的目的不同,尤其在经历Lv3、Lv4这两个阶段是时,由于责任主体发生改变,因此在法律、舆论上面临着许多尚未可知的困难。
不过,ADAS的感知部分,以及不少辅助驾驶功能,例如自动巡航、自动泊车、前车碰撞紧急制动等,都可以在无人驾驶汽车当中得到应用,因此,也为无人驾驶的最终实现贡献了不小的力量。
自动驾驶汽车产业链剖析
为了推动无人驾驶汽车行业的进步,方便大家参考,亿欧对自动驾驶汽车行业进行了产业链分析,主要从产业上下游将其分为了感知、计算平台、算法集成、车辆控制、汽车通讯、无人驾驶汽车运营等六个方面。
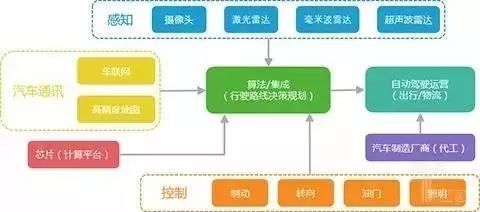
(自动驾驶产业链结构图)
下面,本文将会对产业链上的各个部分进行单独剖析。
感知
自动驾驶汽车的感知部分,主要由摄像头、激光雷达、毫米波雷达、超声波雷达等多种方式共同组成。
由于各种感知方式在不同环境、不同距离、不同作用上各有所长,因此采用多传感器信息融合的方式有利于保证全方位信息的收集,进而使计算机做出更加精准的判断和规划。
激光雷达
目前,激光雷达的生产厂商集中在国外,包括美国Velodyne公司、Quanegy公司以及德国的Ibeo公司等,国内激光雷达初创公司也在尽力追赶。

激光雷达的穿透距离远,高性能激光雷达可以实现200米范围内,精度高达厘米级的3D场景扫描重现,从而帮助自动驾驶系统实现提前行驶路线规划。
目前来看,多线激光雷达很有可能是未来无人车的必备传感器,并且与高精度地图及驾驶系统核心算法紧密相关。目前,多线激光雷达还没有针对车规级的成熟量产方案,机械旋转式多线激光雷达虽然已在普遍应用,但体积较大且价格过于昂贵,更小型更低成本的纯固态激光雷达还未见到成熟产品。
国内有不亚于国外的光机电技术基础,产业链比较完整,因此,诸多深耕激光雷达领域的公司还有不小的机会。
毫米波雷达、超声波雷达
除了激光雷达之外,近年来毫米波雷达和超声波雷达也逐渐成为自动驾驶汽车中,参与多传感器信息融合感知设备。其中,最为知名的例子就是特斯拉在其智能汽车中,完全没有使用激光雷达,而采用毫米波雷达+摄像头的方案。
另外,类似博世、大陆这样的智能辅助驾驶巨头,也在毫米波雷达和超声波雷达这样成本较低传感器设备上,拥有比较深刻的技术积累和应用经验。
而在国内,像行易道这样的毫米波雷达厂商,也在积极进行技术开发,追赶国际巨头水平。
不过,归根结底,特斯拉还只是高级辅助驾驶系统(ADAS),而当操作主体,也就是责任主体向机器转移时,仅仅通过摄像头和毫米波雷达实现自动驾驶功能是不够的,激光雷达所带来的功能性安全冗余非常必要。
摄像头(计算机视觉)
目前,通过摄像头进行拍摄,在进行图像和视频识别,确定车辆前方环境,是自动驾驶汽车的主要感知途径,这也是很多无人驾驶公司的主要研发内容之一。
不过,在这一方面,ADAS要先于无人驾驶汽车向市场推广,因此在数据收集反馈、工程化等方面,ADAS公司也处于领先地位。
国内双目ADAS公司中科慧眼CTO崔峰就表示,在未来无人驾驶汽车中,摄像头(双目)将成为重要的感知部分,中科慧眼未来努力的目标,也是为自动驾驶汽车,乃至各类出行机器人提供机器视觉方面的技术支持。
目前,车载摄像头主要分为单目和双目两种。
双目摄像头基于视差原理,可以在数据量不足的情况下,测定车辆前方环境(树木、行人、车辆、坑洞等),并且获得准确的距离数据,用以提供给自动驾驶系统进行车辆控制。

而单目摄像头,主要基于机器学习原理,使用大量数据进行训练,进行环境识别。尽管需要大量数据支持,且在恶劣光线条件下的表现不如双目摄像头,但其相对便宜的价格以及成熟的技术也获得了一部分公司的青睐。

在单目ADAS领域,以色列公司Mobileye是世界最顶尖的企业,而中国公司与这样的国外巨头依然存在一定的差距。
汽车通讯
汽车通讯主要可以分为两个方面。
第一,是车联网系统。
通过车载通讯设备,完成人与车、车与车、车与环境的信息交互,一方面可以完善运营车辆(出租车、网约车、公交车、物流货车等)和道路交通(如红绿灯)的调度安排,另一方面可以减少车辆的感知设备投入,将车辆及环境采集到的信息与车辆自身采集的信息相融合,从而实现自动驾驶功能。






