文章分析了Canny的优劣,并给出了OpenCV使用深度学习做边缘检测的流程。
转载自丨3d tof
在这篇文章中,我们将学习如何在OpenCV中使用基于深度学习的边缘检测,它比目前流行的canny边缘检测器更精确。
边缘检测在许多用例中是有用的,如视觉显著性检测,目标检测,跟踪和运动分析,结构从运动,3D重建,自动驾驶,图像到文本分析等等。
什么是边缘检测?
边缘检测是计算机视觉中一个非常古老的问题,它涉及到检测图像中的边缘来确定目标的边界,从而分离感兴趣的目标。最流行的边缘检测技术之一是Canny边缘检测,它已经成为大多数计算机视觉研究人员和实践者的首选方法。让我们快速看一下Canny边缘检测。
Canny边缘检测算法
1983年,John Canny在麻省理工学院发明了Canny边缘检测。它将边缘检测视为一个信号处理问题。其核心思想是,如果你观察图像中每个像素的强度变化,它在边缘的时候非常高。
在下面这张简单的图片中,强度变化只发生在边界上。所以,你可以很容易地通过观察像素强度的变化来识别边缘。

现在,看下这张图片。强度不是恒定的,但强度的变化率在边缘处最高。(微积分复习:变化率可以用一阶导数(梯度)来计算。)

Canny边缘检测器通过4步来识别边缘:
-
去噪
:因为这种方法依赖于强度的突然变化,如果图像有很多随机噪声,那么会将噪声作为边缘。所以,使用5×5的高斯滤波器平滑你的图像是一个非常好的主意。
-
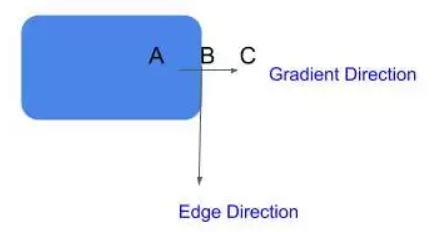
梯度计算
:下一步,我们计算图像中每个像素的强度的梯度(强度变化率)。我们也计算梯度的方向。
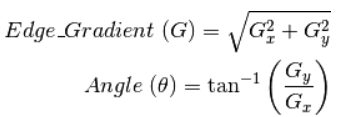
梯度方向垂直于边缘,它被映射到四个方向中的一个(水平、垂直和两个对角线方向)。
-
非极大值抑制
:现在,我们想删除不是边缘的像素(设置它们的值为0)。你可能会说,我们可以简单地选取梯度值最高的像素,这些就是我们的边。然而,在真实的图像中,梯度不是简单地在只一个像素处达到峰值,而是在临近边缘的像素处都非常高。因此我们在梯度方向上取3×3附近的局部最大值。
-
迟滞阈值化
:在下一步中,我们需要决定一个梯度的阈值,低于这个阈值所有的像素都将被抑制(设置为0)。而Canny边缘检测器则采用迟滞阈值法。迟滞阈值法是一种非常简单而有效的方法。我们使用两个阈值来代替只用一个阈值:
高阈值 = 选择一个非常高的值,这样任何梯度值高于这个值的像素都肯定是一个边缘。
低阈值 = 选择一个非常低的值,任何梯度值低于该值的像素绝对不是边缘。
在这两个阈值之间有梯度的像素会被检查,如果它们和边缘相连,就会留下,否则就会去掉。

迟滞阈值化
Canny 边缘检测的问题:
由于Canny边缘检测器只关注局部变化,没有语义(理解图像的内容)理解,精度有限(很多时候是这样)。
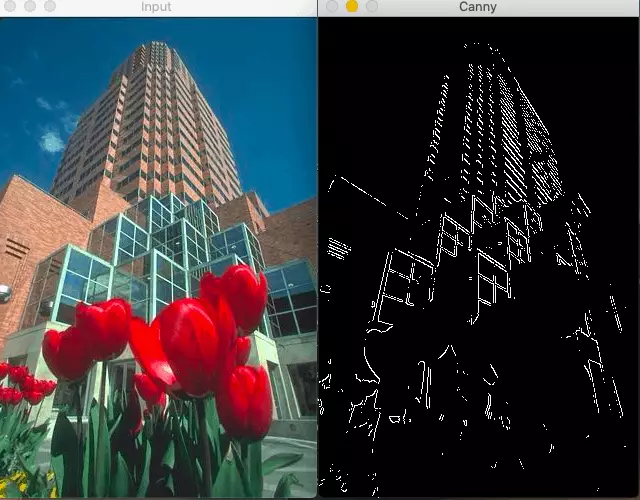
Canny边缘检测器在这种情况下会失败,因为没有理解图像的上下文
语义理解对于边缘检测是至关重要的,这就是为什么使用机器学习或深度学习的基于学习的检测器比canny边缘检测器产生更好的结果。
OpenCV中基于深度学习的边缘检测
OpenCV在其全新的DNN模块中集成了基于深度学习的边缘检测技术。你需要OpenCV 3.4.3或更高版本。这种技术被称为整体嵌套边缘检测或HED,是一种基于学习的端到端边缘检测系统,使用修剪过的类似vgg的卷积神经网络进行图像到图像的预测任务。
HED利用了中间层的输出。之前的层的输出称为side output,将所有5个卷积层的输出进行融合,生成最终的预测。由于在每一层生成的特征图大小不同,它可以有效地以不同的尺度查看图像。
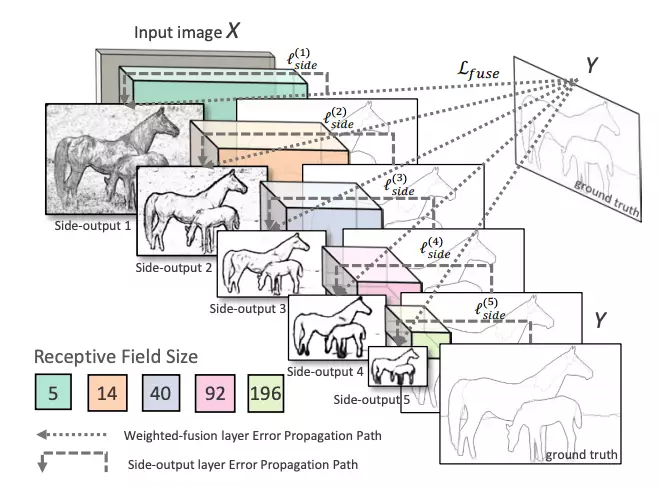
网络结构:整体嵌套边缘检测
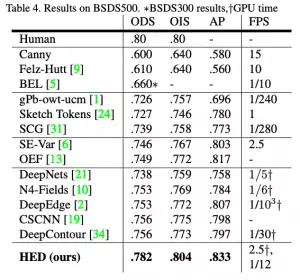
HED方法不仅比其他基于深度学习的方法更准确,而且速度也比其他方法快得多。这就是为什么OpenCV决定将其集成到新的DNN模块中。以下是这篇论文的结果:
在OpenCV中训练深度学习边缘检测的代码
OpenCV使用的预训练模型已经在Caffe框架中训练过了,可以这样加载:
sh download_pretrained.sh
网络中有一个crop层,默认是没有实现的,所以我们需要自己实现一下。
class





