近日,宣布从百度离职的消息让吴恩达(Andrew Ng)一时占据了许多科技媒体的头条。这位人工智能和机器学习领域国际上最权威的学者之一、同时也是在线教育平台Coursera的联合创始人的下一步规划,更是成为媒体热议的焦点。
美国本地时间今天上午在旧金山揭幕的《麻省理工科技评论》EmTech Digital数字峰会上,
原定的第一个演讲嘉宾吴恩达临时决定取消演讲,并委托《麻省理工科技评论》出版人兼总编Jason Pontin向与会者表达了诚挚的歉意。
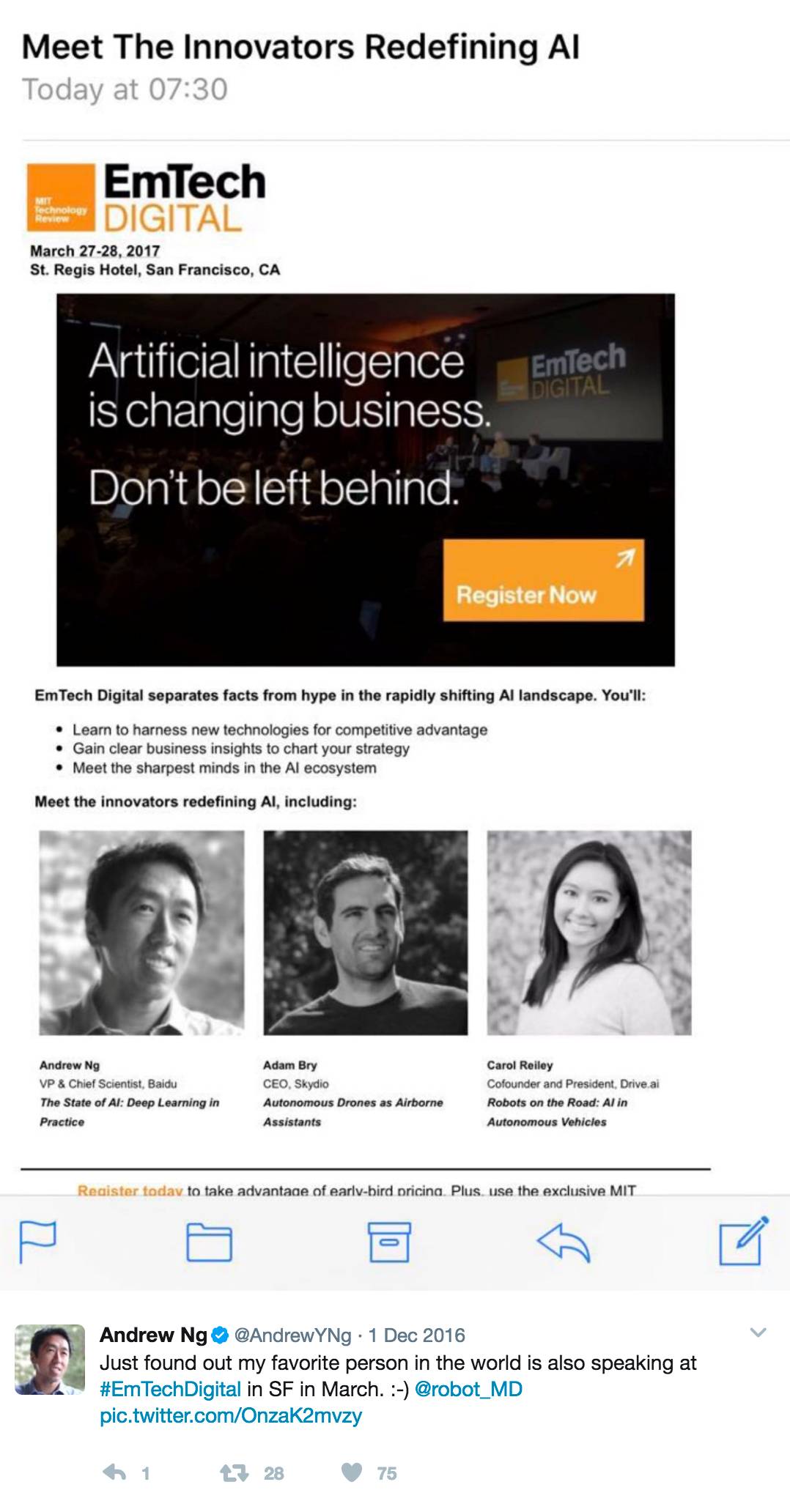
2016年12月吴恩达在推特上表示:刚刚发现这个世界上我最爱的人会和我一起在EmTech Digital做演讲
吴恩达的演讲环节也由百度硅谷AI实验室主任Adam Coates所代替,
他介绍了百度在普及语音交互界面,以及将深度学习用于语音识别领域所取得的进展。
吴恩达临时取消了在EmTech Digital上的演讲,由百度硅谷实验室的Adam Coates代替,想必与其宣布从百度离职不无关系
吴恩达夫妇原定于今天上午先后在EmTech Digital做演讲,但吴恩达的缺席无疑使得妻子莱利引来了更多的关注。
DT君也对莱利的演讲做了整理,详情请见文末
。

drive.ai要打造自动驾驶汽车的“大脑”
跨界的履历
卡罗·莱利今年 35 岁,是出生于1982年的美国华裔。
她的父亲是程序员,母亲则是一位空乘。
与丈夫吴恩达中学就读于新加坡名校莱佛士书院不同,莱利是在华盛顿州的一座小城里长大的。
后来,莱利入读了位于硅谷腹地的圣克拉拉大学,并在那里开始接触编程,
其本科毕业设计是为IBM机械臂设计的触觉反馈系统。
本科毕业后,莱利做了她的第一份全职工作:
洛克希德·马丁公司的天基红外系统的软件工程师。
之后,莱利开始在约翰霍普金斯大学攻读硕士、博士学位。这期间的研究方向同样与机器人有关,但是聚焦到了手术机器人领域。
她在约翰霍普金斯大学所从事的一个项目,
是利用增强现实技术(AR)将触觉信号转化为视觉信号,以表现手术机器人的力量大小,辅助医生进行判断。
在下图所示的例子,是操作手术机器人的医生在监视器里看到的自己操作的机械手进行缝合时候的画面。莱利将机器手的触觉信号以颜色的形式表示出来,绿色的点表示力道刚好,一旦力量过大,屏幕里的绿点会瞬间变红,告诉医生你用力过猛了。这样一来,操作机器人的医生也会有类似亲自进行缝合时的触觉体验。

莱利凭借这项研究获得了硕士学位。但这只是她研究手术机器人的开始。在一系列将计算机图形学应用于手术机器人的研究(比如识别肿瘤)之后,她开始研究用统计学的方法识别医生进行的手术操作,从而开发了一套给操作手术机器人的医生打分的系统。这套系统可以记录、识别医生的动作,用于进行医生训练。
手术机器人的另一个问题在于其过于昂贵。
于是,莱利又将研究兴趣转向了这项技术的廉价化:如何实现手术机器人的DIY?
她发起了一个叫做Tinkerbelle labs的制造者社区
。所谓的“创客”,就是一群喜欢自己DIY做有趣东西的极客。他们大多是技术能人,做着酷炫、廉价的DIY项目。比如以下的两个项目:
空气吉他
:
无需真正拥有一把吉他,只需要抱着一把“空气吉他”做动作,便可奏出音乐。她在吉他手的上臂上布置心电图测点,监控手臂的电信号,演奏者只需做出相应的拨弦等动作,就可以由游戏系统发出音乐。
DIY血压计
:
为第三世界开发了一款可以自行组装、价格低廉、又无需有毒的金属水银的血压计。
凭借着这一成绩,她穿着写有一个字母“M”(Make的首字母)的超人服,登上了 MAKE杂志第29期的封面。
发布在IEEE上的“另类”婚讯
莱利与吴恩达相识于2009年日本神户的 IEEE机器人与自动化学术会议上。
2014年,二人决定携手步入婚姻的殿堂
。然而,既然是技术极客,他们的婚礼也确实与众不同。
首先,订婚消息并不是发布在朋友圈、Facebook上,而是刊登在了《IEEE Spectrum》的网站上!期刊编辑们这样祝福这对新人:
“本刊全体成员十二万分真心地向Andrew和Carol献上我们的祝福,
衷心祝愿他们共同的生活里充满幸福……
以及机器人。”

学术期刊发表婚讯
drive.ai是家什么样的公司?
2015 年 4 月,
莱利在博士就读期间
休学,在加州山景城创立了无人驾驶公司drive.ai。
创立一年后,drive.ai 获得了加州政府批准的第 13 张上路测试的牌照。
自动驾驶领域,硬件突破是一方面,但软件如果解决不了,再好的硬件也没有用。
“我们认为,很多硬件都没好好用”,莱利表示。而对于软件来说,最难解决的问题莫过于控制汽车在雨雪天气穿越夜间繁忙的城市道路。
无人驾驶汽车需要由光学摄像头对周围环境进行二维拍照,再通过算法生成物体的形状、距离。然而,受限于光线等因素,其判断并不可靠:
2016年1月,一辆特斯拉Model S在中国河北邯郸的高速公路上未能识别到正在作业的清扫车而致死;2016年5月,另一辆特斯拉Model S在佛罗里达州误将一辆白色的卡车识别成挂在头顶的告示牌,再度导致死亡事件。这还只是在路况相对简单的白天的高速公路上。
2017年,drive.ai发布了一段路测视频:
drive.ai路测视频
雨后黄昏的山景城道路上,任凭天空颜色晦明变化,对面来车远近光灯,测试车辆完全在软件系统的操控下红灯停,绿灯行,穿梭自如,稳中有快。
汽车上路情况复杂,很难将所有的路况都总结清楚。
drive.ai建立了从浅层到深层学习的无人驾驶技术,而且不只是局限于感知,同时还能作出决定。
他们认为,与其他公司相比,自己的技术可以更加无缝地整合所有传感器——摄像头、雷达的信息。而且,他们的系统也更加聪明:“路测的时长和里程并不一定重要,要紧的是要知道应该收集什么信息,要怎么做去保证信息可以增强深度学习的能力”。
而且,
他们还强调人机互动的重要性
。举个例子,在十字路口,我们有时会看着司机的眼睛,明确他看见我了。但是一辆自动驾驶汽车要如何与人进行目光交汇?莱利认为,自动驾驶汽车除了可以自动驾驶,更应该成为一个大多数人都将与其交流的第一代社交机器人。
这种机器人不像人,但是是可以通过人工智能激活的智能机器。
但是,外界对于drive.ai的更多细节就知之甚少了,部分原因是因为他们最初的时期里一直在stealth mode(隐身模式),即因为担心泄密或被竞争对手察觉等原因,不对外披露公司的工作,直到做出成绩。
从视频来看,drive.ai的技术已经达到一定水平。drive.ai的团队成员具备较强的技术背景。
其核心团队来自斯坦福大学人工智能实验室,
同时还聚集了一批深度学习专家,包括自然语言处理、计算机图形学、自动驾驶、人机交互等领域。
以下独家内容是卡罗·莱利本次在EmTech Digital旧金山峰会上的演讲摘要:
drive.ai一直致力于自动驾驶技术的开发,目标是让人类和机器最终能一起协作。我们利用深度学习做出最优化的解决方案,毕竟,自动驾驶是全球性的问题,所有涉及到的技术都需要一项一项的改进,而不是一夜之间就出现完美的解决方案。
我们把深度学习和人类的经验结合在一起,这是drive.ai最为创新的地方。