上一期的众测,差评团队给差友们带来了史上最贵的产品——越疆魔术师机械臂。。
回顾点这里:
《我的麒麟臂已经饥渴难耐了》
怎么说,果酱完全想不到一个小小机械臂能被差友们玩出这么多花样。
嗯,看来以后找男朋友的一个标准就是要会代码,懂程序了。
第一位差友 Beta君
获奖感言:
看到推送后按耐不住双手的 Beta 君,拉着团队便组建了“触手团”。很幸运可以获得众测资格,感谢差评君也感谢“越疆科技”。很高兴这次拿到了教育版的机器,可以让我们更“屌”的进行测试。好了,相信各位的麒麟臂已经饥渴难耐了,那么我们开始吧!
先简单讲讲背景,这台机械臂是一群山东大学自动化的大佬们开发。产品已经有两代了,在国内外平台上面都进行过众筹,加上滑轨写毛笔字的炫酷功能还上了春晚。

就在前几天的谷歌开发者大会上,
它获得了 Google 工程师的青睐,被选作新一代TPU载体来进行机器学习的展示
。
(图中是 Google 工程师展示基于 Google cloud 的口香糖服务型视觉识别系统通过摄像头与 dobot 机械臂的实现)

(U want a gum?I have the gum!)
本篇评测分为:开箱、首次使用准备、各模块功能测试(笔、吸盘手爪、激光、3D打印)、改进及建议、总结这五个部分。
一、开箱
加完果酱的微信,很神速地发了顺丰。
耗时两天拿到手,拿到的第一反应就是一个字:沉!虽然外包装上面写着
净重8KG
,但我觉得得有
20斤
,一万七的东西就是不一样。。。搬运过程就不讲了(逃)。
这家伙还是很大的,箱子立起来差不多到了膝盖。

(单手拿起来?tan90° 。。。)
首先进入视线的是一本用户手册,打开它会看到机械臂的参数、功能以及所使用的配套软件的简要介绍,甚至还有完备的售后服务条款,背面一个大大的微信服务号,让人十分有安全感。
接下来是发货清单、传感器校准卡
(几天高强度测试我们并没有用到它,不过还是为细心的攻城狮和整机的稳定性点赞)
、大小臂接线说明,还备有五张激光雕刻用的牛皮纸以及一块3D打印用的钢化玻璃垫板。
(没错右边那个白色的是3D打印出来的)

开箱后配件分了三层,大小不一的配件能够紧凑地摆放在箱子中,并且布局十分合理,想必包装设计团队在上面是下了不少功夫的。
(各配件的图在后面有详细介绍)
然后我们的主角就露了出来。

放在桌子上就是这个样子,黑白灰的配色显得非常极客风 。
图中可以看到机械臂的四个关节,就像我们的手臂关节一样可以活动。大臂上贴的黄色警示标语
(小心夹伤)
格外显眼,可见对于安全上的考虑很到位。由于关机时机械臂自动收缩复位,这个警示还是十分有必要的。

从外观上来看的话,第二代比第一代产品外观提升巨大,产品使用
纯黑阳极氧化铝合金+纯白细蚀纹外壳
,走起了消费路线。
从配件上来看的话,越疆这次可谓是想得面面俱到了,配备了机械臂身上使用的三种型号的六角板手,3D打印时用于分离平台与产品美纹纸胶带。
各种细节都充分考虑到,让每位使用者都可以很方便地迅速上手。

主体
(关节1)
下面这个大盒子里面就是机械臂的“大脑”了,和第一代外置的控制盒不同,第二代集成在机器内部,集合了通讯、控制、电机控制模块。
这样做可以减少人为失误导致的故障,但可能也会给爱好 DIY 的极客们带来一些不便。盒子边上 DOBOT 的 logo 十分显眼,与机器很好地融合在一起。

头部
(关节4)
特写,可以看到后面主体两侧外置的黑色步进电机。关节4上面的小圆钮为解锁键,解锁后机械臂将进入电动助力模式,你可以用手按住后牵着它到任何地方后固定到那个位置。
可以看到中间还隐藏着第三个步进电机,这个电机可以让整个机械臂在底座为中心的原点旋转。

小臂上集合了信号输出和机械臂末端工具供电的端口,这么做可以使末端夹具需要连接多端口时的线材不至于凌乱,赞。

可以看到小臂接口上的数字,官方提供的所有功能夹具的线材上都标有接入小臂上哪一个接口的数字,十分清楚,上手毫无难度。

后面就是通信接口(底部中央)和外部设备接口(右上角白色六接口区域),其中外设接口中包含左侧的四个通用GP接口和右侧的两个 SW 12V 电源输出接口。最底下左侧的两个按键分别是 reset(复位)和 key(功能)按键。

接通电源后,电源键会有蓝色灯光亮起,科技感+1。

另一端的角落会有指示灯亮起,指示灯分为三种颜色,每种颜色都有不同的含义,如下图所示。

主体部分的介绍到这里就基本完成了,
总体上看这款定位桌面级的机械臂做得十分精致
,放在桌子上也不会格格不入。
每次有小伙伴来光临宿舍的时候,都会一下子被它吸引。浓浓极客风,外观满分,装X利器。
二、首次使用准备
在越疆科技的官网中可以很方便的找到桌面版的机械臂控制应用程序,同时在说明书上也有写到。下载页面还包含有各种二次开发说明文档、ALARM 使用文档、接口 API 文档、通讯协议等等进行自行开发所需的一切帮助说明。
这也就意味着,电路课上随便连个 Arduino 板子,简单套用一些规则就可以接在机器上进行二次拓展。13个拓展接口、1个可编程按键、2MB脱机指令存储空间,拓展性满分。
软件使用起来十分简单,手机 ( iOS&android ) 上面有 dobot 的控制软件,连接好蓝牙模块就可以在手机上进行控制。
不过手机上的功能相对简单,只可以写字画画。如果需要使用到其他功能,我们需要将机械臂连接到电脑上。
在官方的说明手册中,有软件每个功能的详细使用方法,每一步都有图片文字,完全不用担心上手难度的问题。
具体软件的使用方法在这里就不赘述了。
三、各模块功能测试
写字&画画
作为一款消费级的机械臂,
精度不失为一项重要的指标,而写字画画功能无疑是检验精度的一种最直观的方式。
实现这一功能的末端夹具仅为一支笔,所以不需要在小臂上额外接线,因此可以说是整个机械臂中最为简单的玩法之一。但是简单并不代表可玩性低,下面我们通过一些具体的小测验来看看它在写字画画方面究竟有无“天赋”。

(一支普通的真彩中性笔)
在正式开始写字画画之前,我们还是来看一下软件的配置。
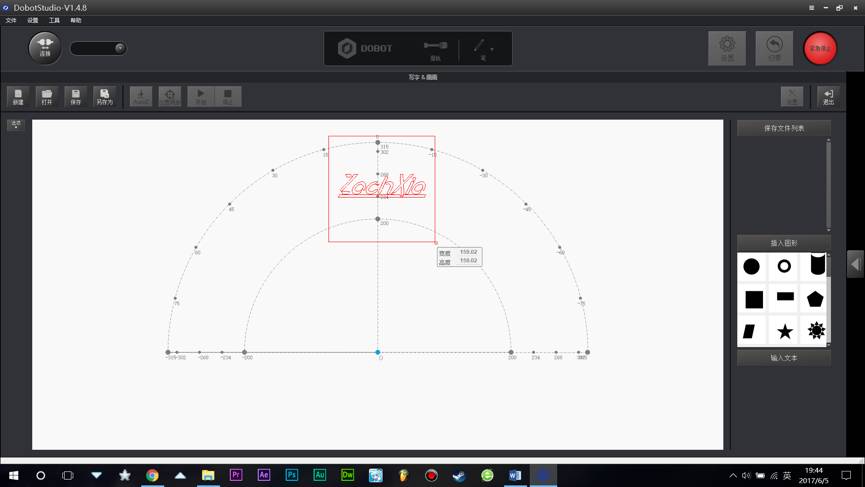
首先,写字画画的操作界面默认会以极坐标的方式呈现,两段半圆弧之间的范围都是可以写画的地方。
其次,由于写字画画都是以线条的方式呈现,
因此输入的源文件应为矢量的路径文件(如.svg文件)
,这一点与使用激光的灰度雕刻不同。
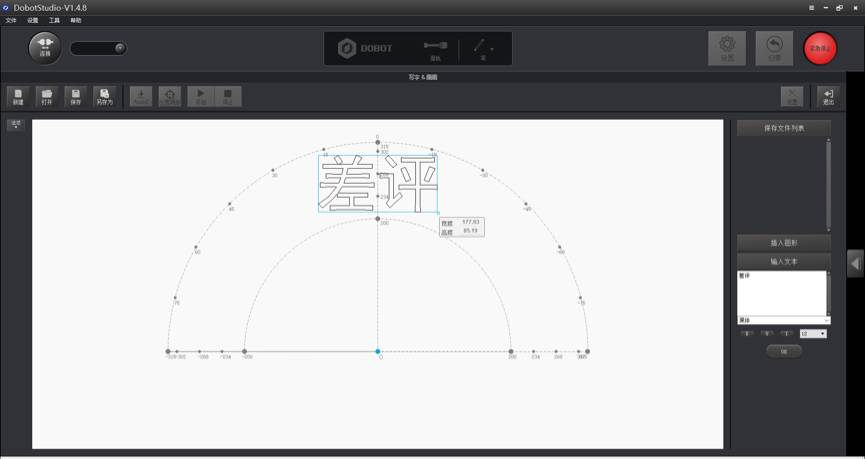
软件中可以直接生成空心的文字以及一些简单的几何形状,也可以导入位图文件,并使用
软件自带的转换功能
转为路径文件。
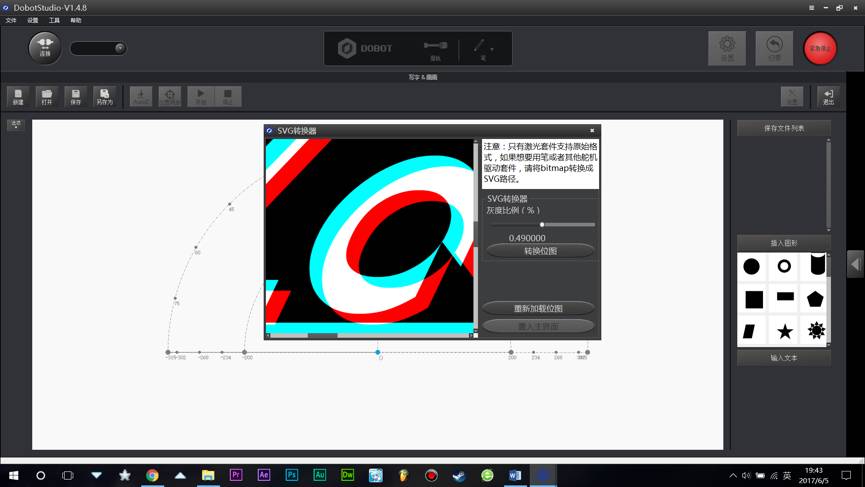
当然,由于转换功能仅有一项灰度比例的参数可调,因此转换的质量并不会很高,只有一些单一背景、轮廓清晰的位图可以较好的转换为路径文件。而对于其他比较复杂的图片,建议使用更专业的矢量图形编辑软件进行转换。
这里我已经准备好了一张转换好格式的图片,让我们一起来看看它完成得如何。
把图片导入到软件中,放置好位置,检查好纸张的位置和机械臂的高度,就可以开始运行任务了。为了防止笔尖带动纸张导致画面出此案偏差,建议将纸张固定,这里我们用重物压住两边。
一张不存在的GIF。。。
画画的过程中,屏幕下方会有进度条显示,屏幕上也会将已画好的部分以绿色线条呈现,方便观察实时进度,这些细节部分越疆处理的很好。
对于作画的全程,我们拍摄了一段小视频,同步发布到了B站上,在结尾点击“阅读原文”可以打开链接。
这里就不再赘述。
【成品和原图的对比图】

(🙈)
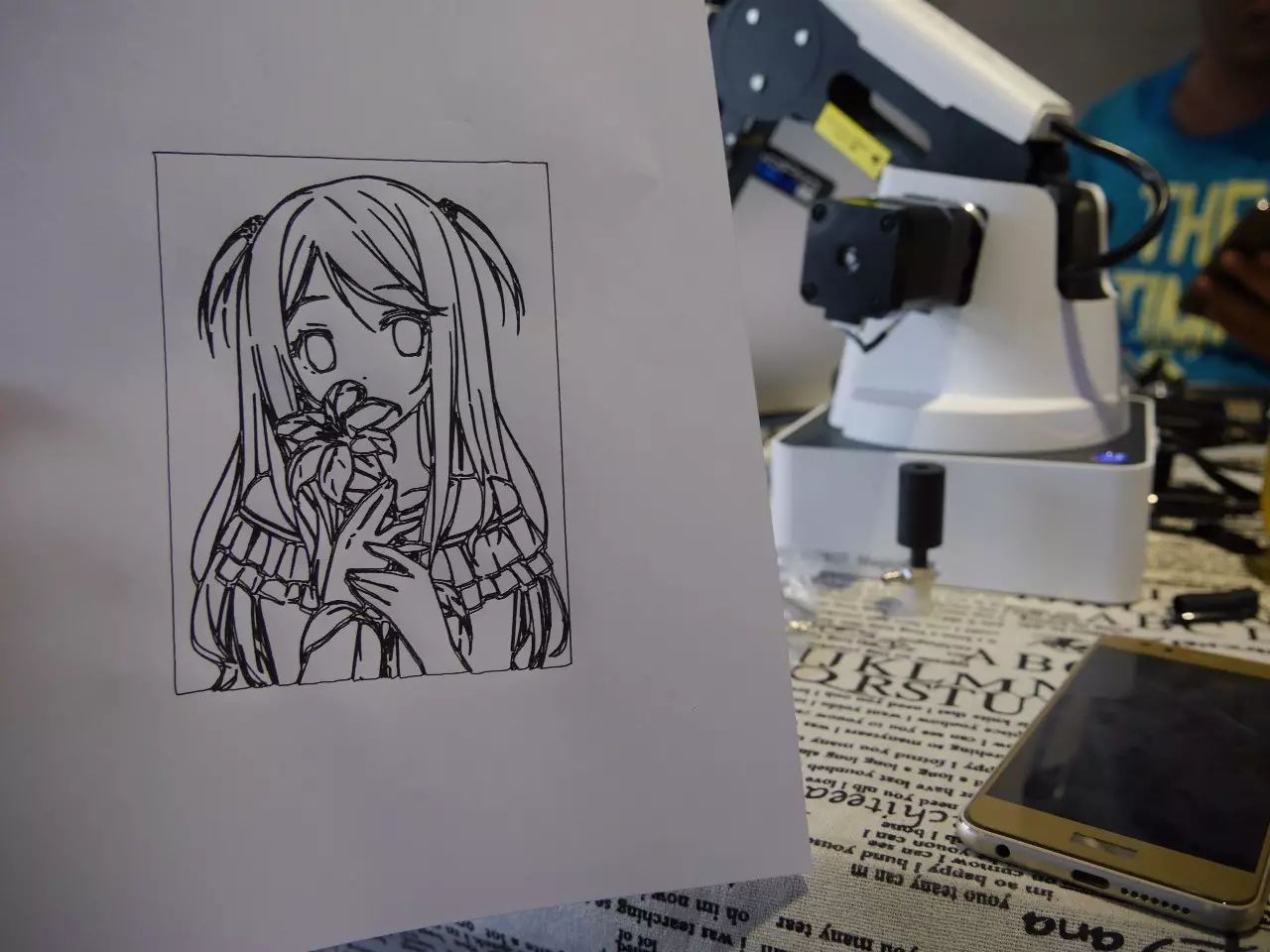
可以看到,
DOBOT 对这幅画的还原度非常高
,可见在定位的精度方面,它是无可挑剔的,只是因为它还无法精准掌握力度,所以还无法画出人一样的笔触,但是抛开这点不谈的话,这幅画可以说是完美。
吸盘&手爪
吸
盘
功能
吸
盘
功能属于基
础
功能,安装
过
程以及操作都十分
简单
很容易上手。
使用准
备
安装
过
程
(大
约
只需要2分
钟
)
我
们
首先要用到吸
盘
,先将
软
管
组
装到吸
盘
部件上,再将吸
盘组
件与机械臂
组
合。
将吸
盘组
件舵机的
连
接
线
接到机械臂小臂的GP3接口上(
虽
然本例并未使用到舵机,如果需要吸起后旋
转
一定角度,
则
需要舵机参与)。
再将气
泵
盒与底座相
连
。
需要
连
接 GP1 和 SW1,一共三条
线
一根管,2分
钟绝对
足
够
。安装
过
程极
为简单
。
操作开始
进
去工作界面后,就可以使用面板中的手柄来控制机械臂来
进
行工作了。Dobot Studio 会将机械臂当前位置
记录
下来,
这
个功能其
实还
是很方便的。

使用体验
本次测评我们使用吸盘功能拾取了一部 iPhone 6S Plus 以及一个数位板。使用起来还是很有意思的,即使少量偏移数位板的中心(大约3cm左右),一样可以自由升降。
气动爪功能
气动爪功能属于基础功能,安装过程以及操作也都十分简单很容易上手。
使用准备
安装过程
由于吸盘和气动爪的舵机部分是公用的,若要安装气动爪,需要先卸下吸盘部分。
将气动爪安装到指定位置。
从吸盘部件上拔出软管,移到气动爪上,小心不要损坏软管。(如果担心软管损坏,可以直接将气嘴旋出,从吸盘部件上移到气动爪上,它们螺纹相同,可以互换使用。)
操作开始
操作方法同上面的吸盘,这里就略过了。

使用体验
本次测评选择了用气动爪来从两个不同的方向来抓一个吸盘,抓的很稳,操作也是非常的简单。
手柄控制、Wi-Fi 模块(教育版本)
手柄控制是机械臂教育版增添的一个功能,顾名思义,我们可以通过手柄来控制机械臂,实现一些简单的功能。但是由于手柄操作无法定量设定它的运动,因此很难达到很大的精度,但是这个功能的娱乐性要更强一些。

DOBOT 教育版随箱赠送了一支 GameSir2.4G 游戏手柄,通过拓展模块将接收器连接在机械臂主机,就可以通过摇杆来控制我们的机械臂的移动了。

具体地说,左右摇杆可以控制机械臂的移动和关节运动,XYAB键则是一些末端功能键,其余按键用来做一些模式的切换。
用手柄操作机械臂的时候,你更多的会觉得你面前的这个小家伙是一台玩具,而不是一个工具,你可以用吸盘或抓手来抓取一些东西再放到别处,说不定还能找回点儿时的乐趣。
由于我们觉得这个功能的定位更偏娱乐,所以没有进行进一步的严格测试,故这一部分的介绍就到这里。

(从后面)
Wi-Fi 模块我个人觉得十分鸡肋,首先不支持 5GHz 的 Wi-Fi 信号,现在市面上很多路由器都发射 2.4Ghz 和 5GHz 混合信号,
对于此类路由器,如果使用该模块需要将无线网络的 2.4GHz 和 5GHz 信号分开
。
另外,经过测试,在 Wi-Fi 模块下控制机械臂会出现比较严重的延时现象,这是我们没有想到的。还有就是信号的不稳定,如果当前的 Wi-Fi 环境比较复杂,会频繁出现连接中断的情况。
总体用下来感觉这个模块还有很大的提升空间,如果想要稳定连接使用的话,还是建议使用 USB 进行连接,实在的线永远比虚的好(逃)。
激光雕刻(教育版本)
激光雕刻加工是利用数控技术为基础,激光为加工媒介。加工材料在激光雕刻照射下瞬间的熔化和气化的物理变性,能使激光雕刻达到加工的目的。激光镌刻就是运用激光技术在物件上面刻写文字,这种技术刻出来的字没有刻痕,物体表面依然光滑,字迹亦不会磨损。
怀着很高的期待开始了激光雕刻的测试。
首先我们需要带上眼镜以防止长时间直视激光对眼睛造成损伤
。

(可以套在近视眼镜上的哦)
激光套件就是它了。

这面写着激光发射头的参数,
波长405nm,输出功率500mw
。这个功率在牛皮纸、木材、皮革等材料上雕刻图案是很轻松的了。

侧面的警示标志十分显眼。

这个就是正面啦。我们可以看到越疆把激光雕刻模块一体化,甚至还包含了它的工作状态灯。
激光雕刻既可以进行写字画画的功能,还可以进行灰度雕刻。我们先测试一下它的画画功能。拿出官方提供的一张牛皮纸,先在纸上进行激光对焦,我们需要调整Z轴的值使它在纸面的点变成最小最亮的。在按照官方推荐的参数进行设置之后,扔进去一张前阵子流行过的 ZOMBIE PIKACHU。

然后开始运行。图中移动的光点就是激光啦,由于这样与纸张没有实质接触,所以不存在笔尖和纸张之间的阻力导致的误差问题,整体精度比用笔画出来的精度又要高上一截。
由于移动中的激光不好对焦,这个点看起来很大,不过在实际过程中这个点十分微小,直径大约为0.5mm。

(牛皮纸烧漏了)
这是我们熟悉的 PIKACHU。

(一张普通的png)
我扔了一张很普通的图片(png),Dobot 桌面版软件自带有位图转换成 svg 路径的功能。通过这个功能,我们就得到了一张带有路径的图片。
可以看到,激光雕刻的过程中,皮卡丘尾巴下面的部分并没有画出来,而是直接忽视掉了,径直地跑到了右边。这说明软件自带的这个位图转换路径的功能还不是十分的完善。
在计算的时候可能会出现一些路径不连接或丢失的情况。
而在软件的实时反馈界面上来看,软件中机械臂的路径是画了尾巴下面的区域的,但是机械臂实际工作中却停在了那里,等到软件上下面的区域跑完则径直地移动到了右边。
(这是一只不能走路的皮卡丘。。。)
所以说,如果想要100%成功,我们还是应该选择自己画出的svg路径文件。
灰度雕刻测试。我们在 Google 上面搜索了许多 pencil drawing 的动物。
(很棒)
甩一张过去。

这个功能我们的期望值很高,我们按照官方推荐的参数进行设置,但是可以看到在下面的动图中,雕刻出来丢失了许多细节,在反复调整灰度范围和激光功率范围之后效果仍然不尽如人意。

越疆宣传片里的灰度雕刻,很炫酷有木有。
3D打印
这个部分真的要好好说一说,经过讨论一致认为3D打印应该是测试中比较复杂的模块。但是上手却发现异常简单,仿佛开启了新世界的大门,3D打印功能所带来的新奇度远比激光雕刻模块要来得大。
我们都知道“
点动成线,线动成面,面动成体
”,这可以很清楚的阐述原理。普通的平面打印机就是将喷头的墨点连成线,最终汇聚到纸张这个平面上。而3D打印则上升了一个维度,将物体用面来表达。所有的物体被切成了一个个的水平面,这些面的堆积得到了我们想要的3D产品。
下面图中就是所需要用到的一切物品了。最上面是钢化玻璃板,下面分别是挤出机、热端、
1.75mm
PLA 耗材、进料管和美纹纸(用于最后分离产品与玻璃板)。

挤出机特写。。。这是下面

挤出机特写,此面朝上。。。

热端特写,上面的高温危险警示标示十分明显。
在加热时热端的金属部分可以达到200度以上,所以在打印时一定不能用手触碰
。

热端的连线。











