AI 科技评论消息:
由IEEE和RSJ(日本机器人协会)联合发起的世界机器人顶尖学术会议IROS将于
2017年9月24日到9月28日
在
加拿大温哥华
召开。IROS国际会议是国际上机器人和智能系统领域最著名、影响力最大的顶级年度会议,预计今年将有来自全世界的超过2500名机器人专家,政府官员,企业代表参加此次会议,而这个会议也将是最前沿的机器人技术的展示舞台。
随着“
机器人会不会取代人类工作
”的热议,在今年的IROS大会上,相关的
机器人抓取和操作竞赛成为被关注的热点
。这一竞赛始于去年在韩国大邱举办的IROS 2016大会,今年是第二届举办。该竞赛旨在用机器手模拟完成一系列实际任务,以推动机器人在现实生活与灵巧制造环境中的应用,今年的比赛分为服务机器人与制造机器人两部分,让我们来看看今年比赛的内容:
服务机器人竞赛
服务机器人竞赛规则为在120分钟内,通过完成十项生活场景中的任务获得最高的分数。目前官网已经公布了十项参考任务,包括:
-
舀豌豆(1
0分):
用勺子将碗里的豌豆舀到碟子里,每成功运送一粒豌豆2分,满分10分;
-
整理咖啡杯(20分):
将随机摆放的咖啡杯放到碟子上(10分),并将一整套杯碟运送到制定位置(10分)。其中杯子落地任务结束;
-
搅咖啡(10分):
用勺子(随机摆放)搅拌另一个杯子里的水,模拟搅咖啡的动作。每搅一次5分;
-
撒盐:
拿起一个装有盐的调料瓶,将盐撒在一个碟子上并称重,能精确洒出1/16杯获得满分;
-
插座拔插(20分):
将插在插座上的两个小夜灯拔出并插回,每个灯的拔出插回各5分;
-
摆放积木(30分):
将带有1-4个孔的积木摆放到母板上的合适位置,正确摆放每个积木5分;

-
插吸管:
将插在一个外卖杯里的吸管拔出并插入另一个外卖杯的孔中;
-
倒水(30分):
从凉水瓶往一个杯子倒水到90%满。低于80%(有标志线)或溢出均被判断失败,3次机会,每次成功获得10分;
-
拉注射器(10分):
将一个注射器的活塞拉伸到30cc的位置,然后再推到尽头。每个动作5分;
-
剪刀剪纸(40分):
用剪刀在A4纸上按画出的线条进行剪纸,每个图案10分。
制造机器人竞赛
制造机器人竞赛包含两个任务:任务板组装与减速器组装。
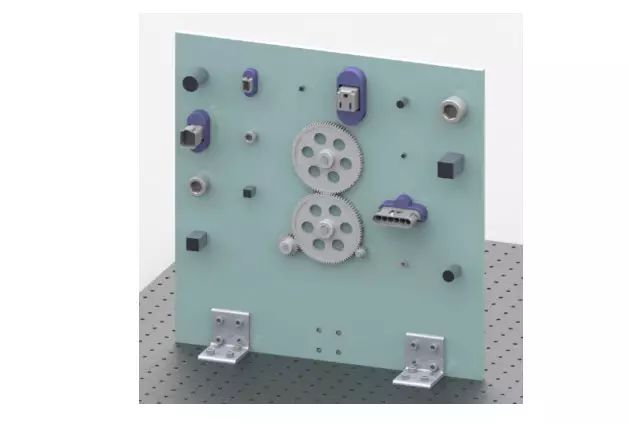
在预制板组装中,机器手首先需要从一个任务板上拆卸各种元器件,包括螺丝、齿轮、钉子和连接器等,并将其分类到已经装有对应部件的分类篮中;然后将这些元器件组装到另一块空白任务板上去;

在减速器组装中,机器手需要用一个基板、两个滚子螺栓、两个轴环、两个齿轮、两个垫圈和螺母组装一个简单的齿轮减速器。该任务分为三个不同难度的子任务。
大会及赞助商将会为每支队伍提供500-1500美元的行程资助。同时李群自动化也将为比赛提供Athena机器手赞助,但从雷锋网了解到的信息,各参赛队伍还是倾向于使用自己的机器手进行比赛。
比赛难在哪里?
如果从人类的视角看,舀豌豆、倒水这样的任务在我们的日常生活中再平常不过,但这当中却需要依靠我们大脑中非常复杂的网络来完成,人类通过进化已经有了自己高度定制化的处理惯例,无需思考就可以自动计算出最佳的解决方案,但对于机器来说,不同的场景和任务都是一次新的冒险。

“机器下棋已经打败了人类,但现在世界上最高级的机器人灵巧手,也赶不上一个一岁小孩的手能力。”该项赛事的组织者,南佛罗里达大学的孙宇教授告诉AI科技评论。
而在去年的抓取与操控比赛获得全自主(Autonomous)任务冠军的清华大学计算机系助理研究员方斌看来,按照今年新制定的规则,在规定时间内完成所有十项任务难度很大,这就要求各支队伍结合自己的实际情况制定合理的任务策略,来获得更高的分数。
方斌向AI科技评论表示,这届比赛他们将参加服务机器人和制造机器人两个项目的比赛。虽然今年的服务机器人去掉了去年的“Hand-in-hand”(手持机器手操作)任务,改为重点重点考察自主环境感知、自主轨迹规划和自主抓取策略的全自主任务,但他们想要卫冕的挑战不小,因为“今年的竞争很激烈,Rethink公司和两支来自日本研究所的队伍都会参加”。
而对于新增的制造机器人竞赛,方斌感觉这次的装配任务对机器人来说会是极大的挑战,“人都不是那么容易能顺利完成齿轮装配。”
一双灵巧的双手
在历年的IROS大会上,机器手的抓取(Grasping)都是热门的讨论内容,也都会有一个专门的Session讨论抓取的研究进展。直到2012年,Gill Pratt在IROS上提出了那个著名的带争议的论断“Grasping is sloved”,这反映了抓取研究的两极:让机器手抓住一个东西,从现在来看这并不是很难;但要想让机器认识你想抓的是什么东西、它在那里、应该怎么处理...抓取还有很长的路要走。










