
极端热量、高压和硫酸云……这是金星的表面环境。在这种环境下,一般的人类探测车很难运作,首当其冲的就是探测车灵敏的电子。
不过,NASA的科学家们想到了一个好点子:如果电子设备不能工作,为什么不换种思路,使用纯机械构建金星探测车?
目前为止,航天器在金星地表工作的最长时间纪录是 127 分钟:在 1982 年 3 月 1 日,前苏联的金星 13 号探测器通过降落伞缓缓着陆,并通过将计算机藏在预先制冷密封的钛压力容器实现了长达两小时的工作寿命。金星的平均地表温度高达 464 摄氏度,甚至比距离太阳最近的行星——水星温度还高。普通的电子设备无法在这种环境下工作。
电子设备噩梦还不仅限于此,除了超高的温度,金星表面的大气压高达 90 个大气压力,相当于海底 3000 英尺(914.4 米)的水压。同时,虽然不必担心金星上层大气中的含硫酸雨会落到地表腐蚀设备,但是由于地表光线太暗(相当于地球上的严重阴天),太阳能供电也是不可能的。
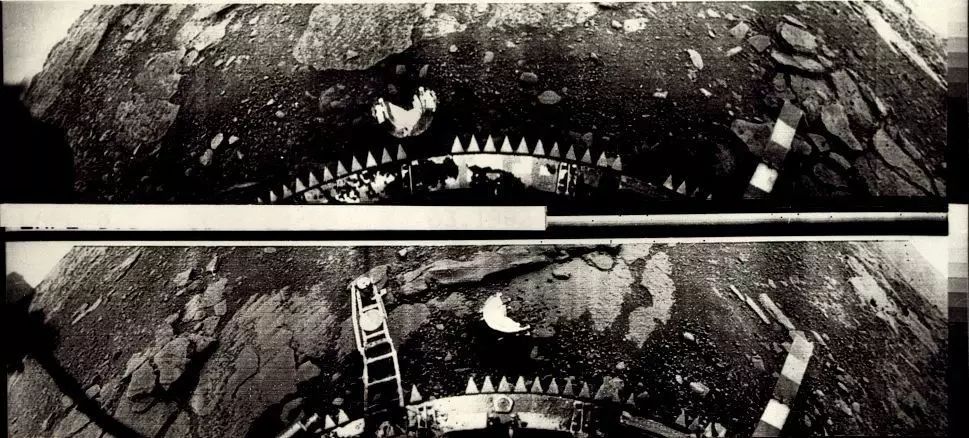
图丨前苏联金星 13 号探测器拍摄的金星地表照片, 尽管它只工作了两个小时
对我们并不友好的金星大气遮挡了地表,让轨道卫星无法获得更多的地表信息。因此只有降落地表的机器人才能为我们揭开它神秘的面纱。然而目前主流的探测器设计思路和前苏联的金星探测器一样:将所有的电子电路封在一个密闭隔热容器里,并使用很可能由放射性钚斯特林发动机供能的制冷系统维持温度。研发这样一套金星车系统需要花费数十亿美元。
上述的金星车传统制造思路既困难又昂贵,而且还有潜在危险。在美国 NASA 创新先进概念项目(NASA Innovative Advanced Concepts,NIAC)的资助下,美国加利福尼亚帕萨迪纳的 NASA 喷气推进实验室(Jet Propulsion Laboratory,JPL)尝试研发了不含传统传感器、计算机和供电系统的金星探索车。这个极端环境自动探测车(Automaton Rover for Extreme Environments)将使用发条齿轮和弹簧,以及其他机构来实现金星车的主要功能——包括能量生成,能量存储,传感,移动甚至是通信——这些都不需要电力驱动。
 图丨在 500 摄氏度下,古老的发条技术将被用来驱动金星车常年工作
图丨在 500 摄氏度下,古老的发条技术将被用来驱动金星车常年工作
在这个电子设备主导的世界,我们中的大多数人并不知道机械计算机能做什么。不过,在大约两千年前(前后相差 1 世纪内),古希腊人制造了了“安提凯希拉”装置。它可以被用来计算太阳和月亮的位置,显示月相,预测日食,计算日历,甚至可以通过由曲柄驱动的不少于 30 个相互啮合的青铜齿轮来展示五个行星的位置。
在 17 和 19 世纪之间,Blaise Pascal, Gottfried Leibniz, 和 Charles Babbage 都相继发明了自己的多功能算术机械计算机。再近一点的 19 世纪 40 年代,机械计算机被大规模使用在军事器材,包括炮兵瞄准系统和航空炸弹瞄准中。
一直到 2002 年,俄罗斯人仍在使用被称作 Globus 的机械计算机计算航天器位置。不过,现在一切都被电子化了。这其实很棒,除了在金星上,因为电路不能并工作。
JPL 实验室研发这台金星车的目的是,制作一个使用最少量电路的机器人。通过尽可能的使用纯机械实现功能,极端环境金星车可以在高温环境下无故障工作数周、数月、甚至数年。
Jonathan Sauder 是 JPL 技术输入组的技术专家爱和机电工程师,也是这个 AREE 项目的负责人。以下是针对项目是如何开始的,以及系统的工作原理等细节对他进行的采访。
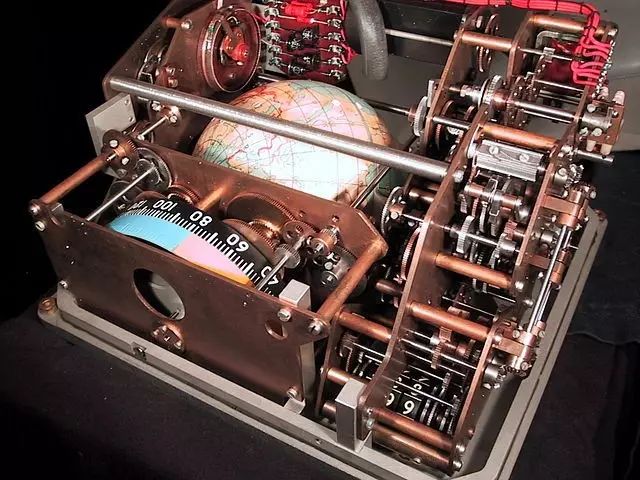
图丨上升号航天器内部的导航装置
问:你是怎么想到制作极端环境中探索车的?
当时我正和一大群工程师坐在一起,进行着并行设计的环节。在茶歇时间,我们正讨论着制冷装置及其组成部件,还有如果能有个纯机械的航天器是多么炫酷,这样的航天器会长什么样,以及能在什么场合派上用场等话题。我们意识到,有两个地方可能需要它,因为电子电路不能工作——一个是金星,因为由于电路过热,金星车的最长存活记录只有两小时。另一个环境是木星周围,因为高放射性会影响电路功能。
问:那么,制作一个纯机械机器人探索车真的可能吗?
我们在 NIAC 项目的第一阶段计划中想要构建一个不含任何电路子系统的全机械的探索车。将所有的标准电路子系统用机械计算取代。在我们进一步了解之后,我们意识到制作一个传统的探索车,比如好奇号火星车那样的使用中央处理器的是不行的。所以,我们不得不使用分布式结构,在设备周围增加许多简单机构来实现引导、发信号、以及告诉它去哪里。
起初我们本打算也使用机械的方式把实现测量。当我们深入下去时发现,我们无法获得足够精度的数据来成像或者输出温度、压力等数据。目前有一些高温电路被研发出来了——比如 碳化硅-镓系统,能够在高温下运行。不过问题是他们的集成度很低,因此你不能使用传统电路来驱动他们,而且不能实现探索车的功能。所以我们的想法是,制作一个能够长期工作的移动平台,并携带上目前已有的耐高温电路系统。

一个早期的 AREE 足式设计概念图
问:你们是从哪里开始着手进行 AREE 的设计的呢?
我们的首要目标是将这个移动平台设计的尽可能可靠耐用。第二个目标是,尽可能多的使用简单、分布式、反应性的机构来引导探索车在金星表面漫步工作。你可能注意到了在我们放出的早期图片中,金星车的设计非常像荷兰艺术家 Theo Jansen 的风力仿生兽(Strandbeests,by Theo Jansen,由塑胶、木头等制成,由风力驱动的仿生物),那个仿生兽是个半自动的“生物”,能够依靠风力在荷兰的沙滩上漫步。实现这样一个的“仿生兽”只需要几个简单的传感器,来帮助控制腿的前后移动,并有内部结构来防水防沙。
在我们早期的概念研发阶段,事实上我们是和 Jansen 一起设计的:他到 JPL 实验室进行了一个为期两天的工程合作会议,我们也了解了他在制作仿生兽的 30 年中得到的经验。他提到的第一件事是,腿必须是能走的。当仿生兽的发明者告诉我们,在金星上,探索车的腿必须能走的时候,这意味着我们必须要找到另一种结构。关键在于,尽管机器人的腿在平坦的软沙滩上表现良好,当它跑到多变的地形(比如未知的金星环境),它的腿就变得不够稳定了。这时探索车有很大可能摔倒,甚至被损坏。
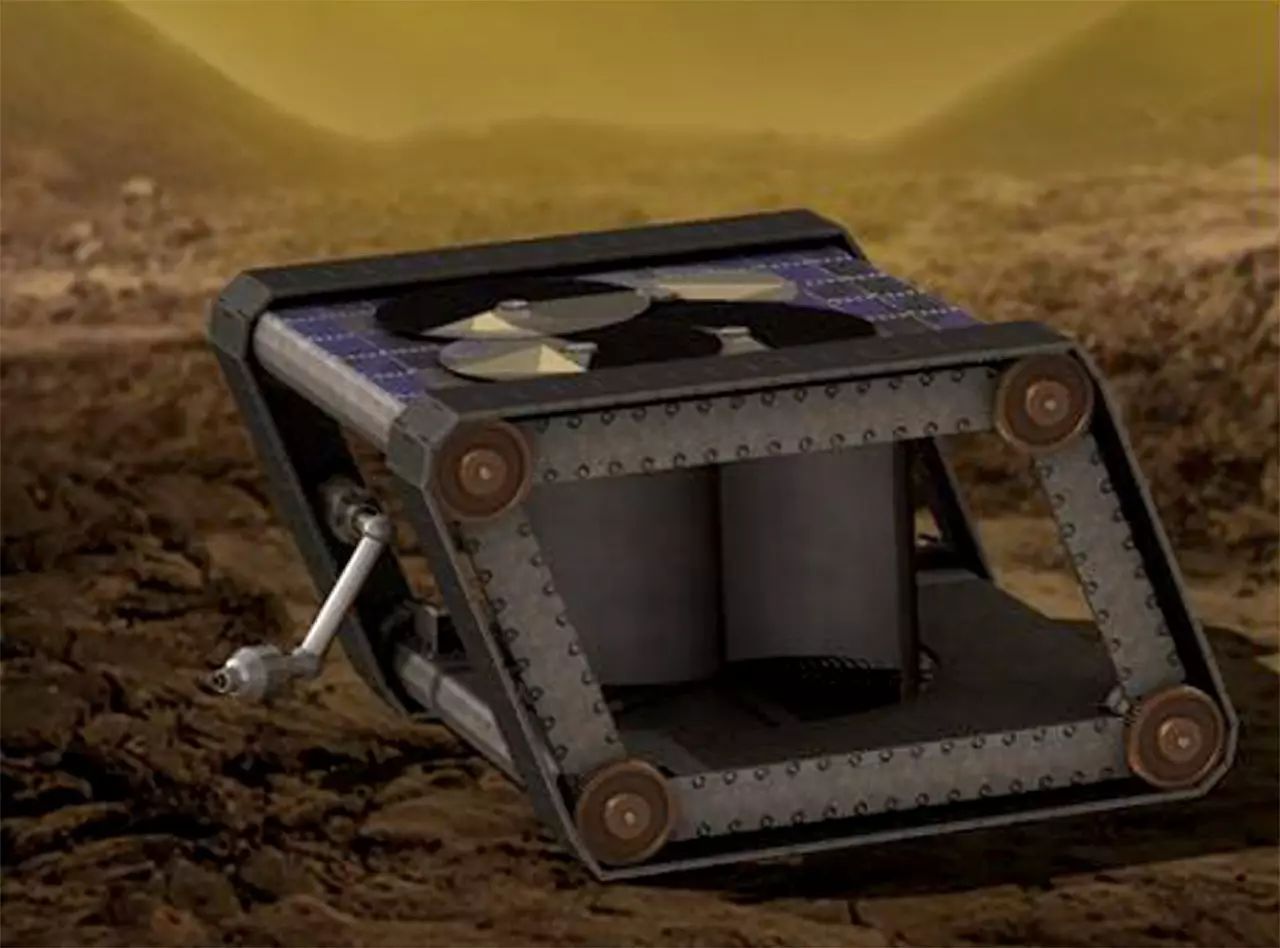
这启发了我们进入第二阶段,将帅气的足式机器人换成了丑陋但可靠的,外观像一战时英国坦克的机器人。
AREE 第二阶段的概念图,能够移动,并配有内置式风涡轮。这种坦克式设计有许多优点,而且不会经常摔倒。 由于其垂直对称式设计,即使它被翻过来了,它也可以继续运动。这并不意味着是最终设计,JPL 的该团队也开始研究轮式设计了,因为轮式设计由于没有更多的运动部件,会更加可靠。
问:你能描述下,AREE 如何能够在金星表面导航?
简单地说,我们正在研发一些针对避障和决定是否有足够能量运动的专用系统,而不是像标准的中心化系统一样,你可以多进程运行,并且通过软件来修改或重设。
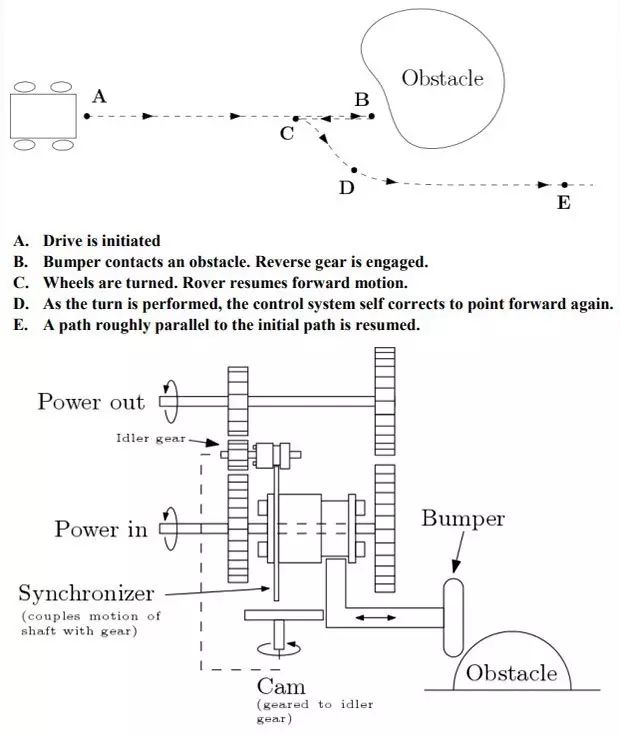
我们正试图针对一个特定的任务,将工作原理尽可能简化,以更好的完成任务。也许当机器人撞到一个物体时,弹出一个杠杆,将自己向后推,并旋转 90 ° ,然后前进绕开障碍。我们的机器人只能执行这样一种避障动作,不过可以通过多次重复来最终成功绕开障碍。
避障模块由另一个简单的机械系统组成,使用缓冲器,反向齿轮和凸轮来将机器人向后移动一点,之后缓冲器和齿轮会被重置,然后继续运行。在正常的前向运动中,动力通过左边的齿轮从输入轴传到输出轴,另一个齿轮也会随之旋转,但并不做功。当机器人碰到障碍物时,反向齿轮由同步器啮合,随后拥有相反转向。当凸轮转完一整周后,它会将缓冲器重置,推回原位。还有一个类似的凸轮被用在了当后退驱动完成后车轮转向的功能部分。
问:AREE 的功能与其他金星着陆器比有什么不同?
现在这里有好几个金星概念任务,每一个任务的花费都不低于火星车好奇号,比如在一个地点着陆,或者到两个地点采集数据。绝大多数计划是非常复杂的,并且能在金星表面停留运行 2 到 24 小时。我们正致力于通过这个金星车设计,将运行时间增加到一个月。这将是我们的关键创新之处:能够在多个地点采样数据,并且有足够的时间来观察理解周边环境的变化情况。
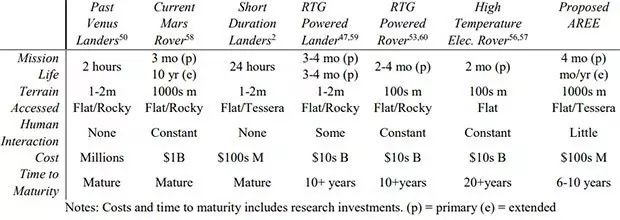
AREE 与其他金星探索车计划的对比
问:你对 AREE 怎么看,它就是你理想中的样子吗?
理想中的机器人应该是能够在金星上环境最恶劣的地点 之一——tessera 上行走的。 tessera 非常的粗糙,还有熔岩。我们的目标是在任务期间追踪这个探索车,采集沿途地理数据来帮助我们了解金星的演变。我理想中的金星探索车,如果能比现有的 1.5 米更大就好了。现在由于热防护罩的限制,只能做到这样。如果可以的话,我们想把探索车扩大到 2.5 米大小来克服更大的障碍,并且采集到更多风能。
我们的终极目标是,释放一个重型卡车一样的金星探索车,从而克服绝大多数障碍,一路长途跋涉,实现缓慢而稳定的自动驾驶,并在沿途采集样本和天气数据。
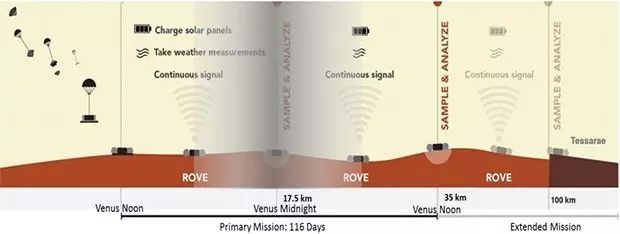
穿越进行 tessera 地区的概念行动。在长达 116 个地球日(一个金星昼夜循环)的初级任务周期内,探索车将行进 35 公里。在另一个扩展版任务中,探索车将用 3 年时间行进 100 公里。
到了这一步,你可能会好奇,如果我们无法收到它的数据,那么送一个发条探索车去金星表面又有什么意义呢?因为没有电路,探索车如何能够发送数据给我们?用机械存储数据当然有办法:暂时存储数字是很容易的事情,你可以在金属留声机唱片上存储 1 MB 的数据,但是之后怎么传出去呢?
尽管听起来有些疯狂,有一种方法是可行的:使用氢气球将这些金属唱片升到金星上层大气中,然后在高空使用太阳能无人机来接应。随后无人机将读取数据,并将数据传送到卫星。研究者们也在考虑使用真空管收音机,尽管真空管收音机并不排斥高温环境,但在金星大气中,真空管很可能会漏气失效。
AREE 研发人员的解决方案是:雷达反射器。在探索车顶上放置的雷达反射器能够被轨道上的卫星发现,通过在反射器上放置“百叶窗”,每当卫星略过的时候,1000 字节的数据可以被观测传送。如果增加多个不同反射率的反射器,并让百叶窗在不同频率下工作,那么反射器每天最多能够传送 32 个独立变量。Sauder 表示,对于一些数据,你甚至不需要传输特定数字,因为只要将反射器放在一个扇叶下面,你就能通过观测得出不同地点的相对风速了。
那么现在,你已经基本理解了这个神奇而可靠的机器人金星探索车。最后一个问题就是,它所能执行的科学探索种类有哪些?这对 AREE 来说是个相当困难的问题,因为在 NIAC 第一阶段计划中解释道:
纯机械系统的最大劣势在于其科研测量的能力。除了通讯模块,需要使用耐高温电路的关键模块之一就是测量部分。对于更加复杂的测量,尤其是地质测量,它们都需要电子电路来完成。
去年晚些时候,NASA 宣布了它的 HOTTech (the Hot Operating Temperature Technology Program)项目。该项目资助“在 500 摄氏度或以上的高温环境下的机器人探索先进技术研发”。 AREE 团队希望在这个项目中能够产生一些可用的科学测量设备。尽管如果没有可用的设备诞生,他们也有一些有趣的无电路科学测量方法,包括使用扇叶测量风速,使用热膨胀材料测量温度和压力,以及用一些材料棒通过化学反应检测成分。
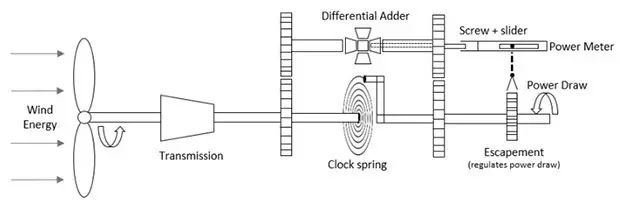
AREE 将风能存储在复合弹簧中,就像一个怀表一样。上面展示的机械系统能够测量弹簧中的能量,当能量充足时,通过离合器,能量将被传送至运动模块中。 如果你只想在一段时间之后启动探索车,或者当其他条件满足时启动,可以加入机械逻辑门来与时钟或其他传感器协同工作。
需要澄清的是,Sauder 和他的团队制作这一切机械结构并不是为了娱乐:以一种经济的方式探索金星并让探索车工作超过两天时间很有必要。“我们这个项目中的定位并不是复制已有的东西,或者在高温电子领域即将诞生的东西。而是为目前无法解决的问题提供一套机械解决方案,尽管在研发上可能需要更多时间” Sauder 表示。
AREE 的技术还可以在太阳系的其他角落发挥作用,而不仅止于在木卫二欧罗巴的高放射环境工作。就在地球上,AREE 在近距离采集活火山样本,或高放射环境下工作时就很有优势。 AREE 的其他优势还有:它可以被超高温彻底消毒而不影响功能。假如你在火星冰盖下发现了一个湖泊,并有带触手的 Y 状生物游动,那么你就可以将消毒过机器人释放来采集样本,而不必担心造成生物污染。
目前为止,AREE 项目已经收到了 NIAC 第二阶段的资助。该团队正在对运动系统进行下一步研究,很可能将坦克式设计换车更可靠的轮式设计。他们同时也在进行高温机械钟的开发——这是任何自动化机械计算机的核心。 Sauder 表示,他希望明年他们能在构建和测试雷达目标信号系统方面产生更多激动人心的成果。事实上,我们已经为之折服了:这是我们所见到的最为创新的机器人,很期待它着陆金星的那天。
-End-
编辑:wyx













