原文来源
:arXiv
作者:
Sarah M. Ackerman、G. Matthew Fricke、Joshua P. Hecker、Kastro M. Hamed、Samantha R. Fowler、Antonio D. Griego、Jarett C. Jones、J. Jake Nichol、Kurt W. Leucht、Melanie E. Moses
「雷克世界」编译:嗯~是阿童木呀、KABUDA
导语:美国国家航空航天局(NASA)的“火星之旅”项目的目标是在2030年之前向火星发送载人任务。但这些任务可能要需要很长时间完成,因为从地球运输足够的材料是不实际的,宇航员将需要利用火星上已有的资源。而自动机器人群体可以在人类到达之前进行定位、收集和存储资源。最近,美国新墨西哥大学计算机科学系、佛罗里达理工大学 、美国宇航局肯尼迪航天中心、美国圣塔菲研究所的一些专家们对Swarmathon——一个群体机器人编程挑战赛,在科技和教育领域的影响进行了解读。
Swarmathon是一个群体机器人编程挑战赛,吸引了美国宇航局“火星之旅”中少数民族(Minority-serving)机构的大学生。团队通过对一组机器人进行编程以进行搜索、拾取和将资源放入收集区等操作进行竞争。Swarmathon生产那些能够用于收集火星表面资源的机器人群体的原型。机器人完全自主操作,没有全局地图,而每个团队的算法必须具有足够的灵活性,才能有效地从各种未知分布中找到资源。Swarmathon包括物理和虚拟竞赛。物理竞争对手在他们在学校所构建的机器人上测试他们的算法,然后他们在于肯尼迪航天中心的室外竞技场上所举行的为期三天的比赛中,将自己的代码上传到同一机器人上,自主运行。虚拟竞争者在模拟中完成相同的挑战。参赛者指导当地团队在独立的高中分区进行比赛。在前两年里,有超过1100名学生参加。63%的学生来自少数民族和种族群体(underrepresented ethnic and racial groups)。参与者在兴趣和核心机器人能力方面都取得了显著的进步,而这在性别和种族群体中是相当的。这表明Swarmathon正在有效地培养未来机器人学家的多样性。
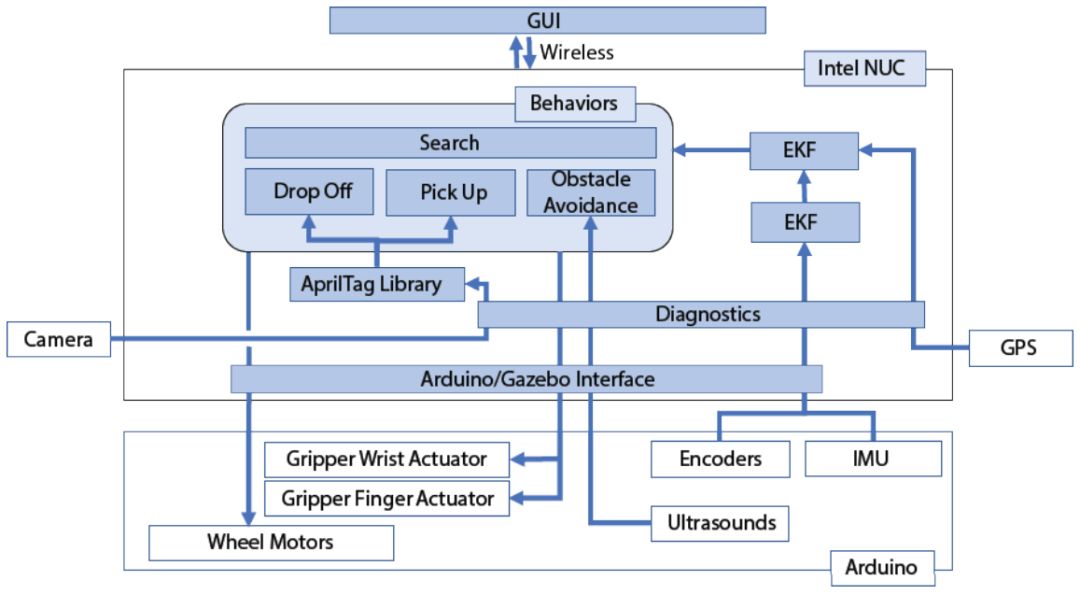
图1:Swarmie架构,软件包(着色)通过USB接口或通过Gazebo模拟,与硬件连接。
A.火星之旅
美国国家航空航天局(NASA)的“火星之旅”项目的目标是在2030年之前向火星发送载人任务。这些地面任务可能持续数月或数年,并且因为从地球运输足够的材料是不实际的,宇航员将需要利用火星上已有的资源。例如,小的冰块可以融化成水,并转化为氧气和氢气作为燃料。这种方法被称为现场资源利用(ISRU)。
B.与机器人群体一起迎接挑战
自动机器人群体可以在人类到达之前进行定位、收集和存储资源。一群小型、廉价的机器人可以自主行动,这要比若干大型、昂贵的手动控制的漫游车更加有优势,因为它们具有鲁棒性、可扩展并且能够探索未映射的环境。
ISRU与中央地区觅食(CPF)密切相关,在此过程中,资源被运送到中央收集区。受群居昆虫为他们的殖民地收集资源的成功所带来的启发,一项关于机器人觅食的早期研究,计算性地模拟了一个在遥远的星球上采集岩石样本的群体。CPF是一个关键的机器人群应用,研究将继续改进觅食群体的算法和工程方法。
我们的团队设计和建造了一群叫做Swarmies的觅食机器人。Swarmies坚固耐用,可在室外运行数小时,并配备传感器和夹具,使他们能够完成CPF任务。我们还开发了自定义软件包和图形用户界面(GUI),可在模拟和物理硬件中快速开发和测试CPF算法。
群体觅食提供了一个理想的教育挑战,因为成功的策略需要基础机器人技能,例如抓取、定位、导航、探索、分散的沟通和协调。
C. Swarmathon竞赛
在Swarmathon年度竞赛中,大学生团队开发了自主群体觅食的算法。物理竞赛项目组中的3至6名Swarmies团队将收集了放置在225至484平方米的户外竞技场的128-256中的大部分资源。虚拟竞赛是在同一个竞技场和机器人的Gazebo模拟中运行的。机器人必须完全自主地进行搜索、收集和将资源放置到中央收集区。竞赛以一系列轮次进行,并且在每一轮中资源被放置在不同的分布中(即在均匀随机的或不同大小和形状的集群中),并且每轮中运行相同的代码。得分取决于轮次结束时收集区的资源数量(机器人从收集区推出的资源不计入分数)。机器人的视野有限,没有全局地图,因此很难找到资源。在第三次高中比赛中,年轻的学生受到Swarmathon大学生的指导,在简化的模拟中完成类似的挑战。虚拟竞赛的获胜者在第二年进入物理竞赛。
D.多样化STEM /机器人管道
美国宇航局的现实性ISRU问题的解决提供了一个机会,让学生参与机器人和计算机科学(CS),帮助满足行业中日益增长的对科学、技术、工程和数学(STEM)人才的需求。虽然女性和少数族裔在美国大学毕业生和美国工作者中所占比例越来越高,但他们在STEM大学毕业生和专业人员中所占的比例并不高,尤其是在CS和工程领域。将他们纳入STEM有助于解决未来几十年这些领域的预期缺口。此外,“来自不同背景的工作者提高了科学的质量,因为他们可能会带来各种新的视角,在研究和应用方面也是如此”。出于这些原因,Swarmathon招募了2至4年制的来自少数民族服务机构(MSI)的竞争对手,这些机构包括历史上的黑人学院和大学(HBCU)、西班牙裔服务机构(HSI)以及部落学院和大学(TCUs)。这为参与学生提供了一个本来不可能存在的教育机会:
“Swarmathon为学生提供了一个机会,使他们能够开展跨学科和艰苦的实际工程问题研究。他们知道一个我所不知道的,能够让我们所有人都感到愉快的答案。我在一所小型社区学院任教,而且我们根本无法从头开始做这样的工作”——Swarmathon学院导师
。
Swarmathon吸引了多元化的学生,其中81%来自少数群体(包括亚洲学生)的学生,而818名大学生中有63%被认为是属于少数种族或族裔群体(黑人/非洲裔美国人、美洲印第安人/阿拉斯加原住民、或西班牙裔/拉丁裔),比美国本科CS专业更加多样化,其中只有15.8%来自这些代表性不足的群体。
结果
前两年,29个物理组团队(共31个物理组团队)和27个虚拟组团队(共29个虚拟组团队)成功上传代码,进行了比赛。这些学生在比赛中所需的技能包括精通ROS编程、群体算法(swarm algorithm)设计以及实验设计与测试。
一些团队开发了新型有效搜索算法,显著改进了基础代码。2017年物理竞赛冠军,西南印度理工学院(SIPI)对不同搜索策略进行了试验,这些策略的灵感来源于蜗牛壳、割草机路径和螺纹风格几何设计等,最终,源于自行车车轮辐条的灵感决定了最终策略。SIPI的算法表现出了强大的灵活性,可在多种目标分布任务中执行高水平的操作性能。
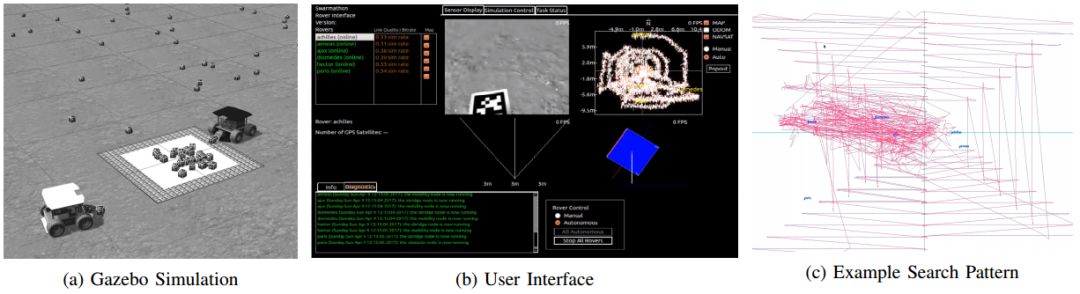
图2.Gazebo和GUI。(a)两台机器人将标有AprilTags的目标立方体放置收集区。(b)Gazebo界面显示机器人状态,位置跟踪和摄像头视图。(c)蒙哥马利学院6个获奖机器人的路径;密集的活动表现了机器人在大型目标集群和收集区之间的移动。
图2c显示了在大型目标立方体集群中,蒙哥马利学院的搜索算法。锯齿形图案显示了机器人在竞技场中的搜索路径。一旦发现大型资源集群,一部分机器人会继续搜索,而另一部分机器人则会专注于从集群中收集资源。该策略成功地实现了探索与应用之间的权衡,并且几乎在每项资源分配方面都显著优于其他团队,从而在2017年虚拟竞赛中取得胜利。与新的搜索算法相比,工程创新(改进本地化和资源取放)提高了更多的分数。
学生学习结果评估





