宾夕法尼亚大学工程学院院长、IEEE、ASME Fellow,美国国家工程院院士Vijay Kumar 在国际有极高的人气,他在空中机器人(无人机)领域无论是学术还是成果都有极大的成就,在CFF-GAIR全球智能与机器人峰会,Vijay Kumar在报告中提出了无人机发展的“5S”趋势:

未来机器人多应用于搜索和营救等场景,如果一个无人机体积太大,那么将极不利于其对环境的勘探。面对未知的环境,小型无人机有更强的自主性。就像一群小蜜蜂。

但同时,这也带来了一些负面的挑战。当一个无人机的尺寸缩小至11cm的轴距,20g的重量,它根本不能移动一些木块、石头等物体。
又小又安全的无人机,及时碰撞到路人也不会致伤,这样才更容易在各种环境中进行飞行控制。而且,由于机器体积变小,其惯性也会减小,能够在发生撞击时迅速自我调整平衡。
无人机在躲避障碍物过程中,能够通过传感器、云端控制、摄像头这样的闭环,此外,依靠计算机视觉对环境进行检测,分析周围环境的特征,实现自我规划路径,就像人看到障碍物知道绕道那样。
但这不只是简单的避障。在陀螺仪和加速计的配合下,无人机知道如何根据环境特征进行移动。通过每秒做数百次的运算,计算出最可行的方位和速度。传感器不同的等级、不同的不确定性,我们都可以通过概率学的方法把系统数据融合在一起,通过一个等式来把它归纳成一个位置和速度的估算。但这个要达到一定灵敏度也仍是个挑战。
此外,无人机在飞行过程中不仅需要可以判断其速度和位置,还要加以控制,避免走入障碍区。这就是需要地图的识别技术了。
无人机的自主能力在其执行作战或协同任务时显得尤为重要。无人作战飞机(Unmanned Combat Aerial Vehicles UCAV)面临的作战任务复杂、态势变化快、不确定因素多,无人作战飞机必须自主完成对目标的探测、识别,制定诸如目标分配、战术规划和机动决策等攻击决策,无人作战飞机的指挥控制系统应是具有驻留性、反应性、社会性,因此要求其能在快速全面感知环境的基础上实时做出决策。
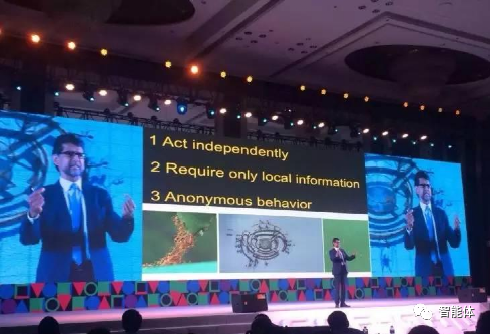
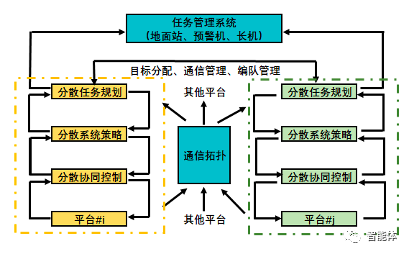
多无人机协同时将一组不同位置、不同价值、不同威胁程度的目标合理地分配给类型、价值和战斗力都不同的无人机,已达到整体作战效能最大、代价最小的目的。协同的前提条件是无人机平台间的通信和信息共享,无人机平台之间信息是高度分布的,无人机平台的运动以及通信拓扑的变化,以最小信息流为基础的多平台分散协调控制系统结构。
多无人机协同搜索也是多UAV协同控制的一个重要研究内容,多架UAV同时对一个不确定区域进行搜索,目的在于更快速、全面地获取搜索区域的信息,降低环境的未知性。协同工作时考虑不同UAV飞行和探测传感器的约束,在不确定环境中采用协同自主控制的方法,从而达到整体任务效能的优化。

1、完全机构化的控制方案和策略,对自身和环境变化没有做出反应的能力;(自动控制)
2、能够适应对象和环境的不确定性,具有变参数、变结构的能力;
3、具有故障实时诊断、隔离、和根据故障情况进行系统重构能力;
4、能够根据变化的任务和态势决策和任务重规划的能力;
适应性自主:即以适应各类不确定性为目标的自主控制,其中涵盖了由对象、环境以及任务、态势等带来的不确定因素,使系统在无人机参与时实现控制目的。
系统性自主:系统作为独立自主的智能体与其它智能体或人协同时,可进行自主协调、协作、协商等控制行为,以自身适应性自主控制为基础,通过协同性自主可以实现多平台或人机协作,在资源、效率等众多方面得到更优化的控制效果。
学习型自主:高级的自主系统必须具备自学习能力,及能够根据对象、环境、任务及控制效果,通过自主的修正、优化和学习的行为,提高控制性能。
因此,高级的自主系统具有适应性、自修复、智能性、协同性、自学习等特点。
自主控制包括自动完成预先确定的航路和规划的任务,或者在线感知形式,并按确定的使命、原则在飞行中进行决策并自主执行任务。自主控制的挑战就是在不确定性的条件下,实时或近乎实时地解决一系列最优化的求解问题,并且不需要人为的干预。面对不确定性的自动决策是自主控制从内回路控制、自动驾驶仪到飞行管理、多飞行器管理、再到任务管理的一种逻辑层次的进步,也是自动控制从连续反应的控制层面到离散事件驱动的层面的一种延伸。

无人机的自主导航是指无人机安全地从一个地点移动到另一个地点的过程。从技术层面可以分解成四个基本问题:
1、What does the environment look like? 无人机必须知道环境的地图,才能在地图中找到路径。无人机确定环境的过程称为地图创建。
2、Where am I? 无人机确定当前运动状态的过程叫做定位。
3、Where am I going? 无人机在环境中确定下一个运动目标位置的过程称为运动决策。
4、How do I get there? 在知道起点和终点的情况下,无人机规划如何到达目标的方法被称为运动规划。
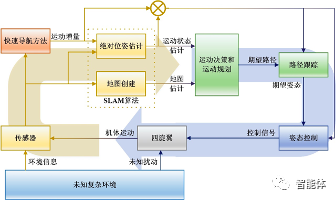
无人机在未知复杂环境中的自主飞行问题主要有两个难点,一方面环境中存在不利于飞行控制的外部干扰,另一方面无人机缺少对环境的先验信息,需要在运动过程中建立环境地图以满足位姿估计和运动规划的需要。此时,上述几个问题将彼此关联,构成一个整体。其中定位与地图创建是自主导航中最基本的问题。依赖于具有足够精度的环境地图,而创建地图又以准确定位为基础。因此,定位与地图创建彼此依赖、不可分离,是未知环境自主导航中的“鸡和蛋”的问题。为此,研究人员在机器人科学中针对未知环境的导航问题提出了同时定位与地图创建(Simultaneous Localization And Mapping,SLAM)概念。为了获得全局一致的运动状态和地图估计,SLAM算法往往计算缓慢,无法满足无人机飞行控制中状态反馈的需要。因此在实际应用中,SLAM算法需要与高输出频率的快速运动增量估计方法(或称局部位姿估计方法)相结合。针对未知环境探索的任务,运动决策和运动规划问题关系紧密,可予以合并。此外,控制系统受到环境中的位置扰动影响,需要研究无人机在存在外部干扰情况下的控制问题。
以系统框图形式描述了无人机在未知复杂环境中自主导航和飞行控制问题的整体框架。框架包含五个主要部分:姿态控制、快速导航方法、SLAM算法、运动决策与规划以及轨迹跟踪,上述五个部分构成一个完整回路。其中快速导航方法根据传感器获得的无人机运动相关信息和环境信息估计运动增量,SLAM算法在此基础上计算全局状态和地图。两种估计方法通过简单的坐标变换即可得到以较高频率输出的全局运动状态估计。根据未知环境自主探索的任务要求设计合理的运动决策与规划方法,输出期望运动路径。然后针对无人机的运动特点,以轨迹跟踪的方法计算期望姿态,再通过高精度的姿态控制方法解决包含未知扰动的无人机姿态控制问题。
一般来说,空中机器人在计算机视觉技术的支持下也能“看到东西”,但它飞行速度很快,且视程只有20米。所以它需要不断更新其地图数据,然后做出飞行决策来绕开障碍物。
这里说的是AI视觉,我们看一下目前团队做的一些AI视觉无人机的DEMO。
“小尺寸就很难达到自主性。”Vijay Kumar教授表示,如果当一个无人机配备了一些部件,整个平台就重大3公斤,悬停的时候,无人机的承重压力就更大了。重要的是,整个空中机器人中有45%到50%的重量都是电缆、传感器和外壳。本身无人机是低功耗的,但无效部件占重量的百分比过大,所以造成高功耗。
所以有哪些又便宜又轻便解决途径呢?答案就是我们的智能手机。

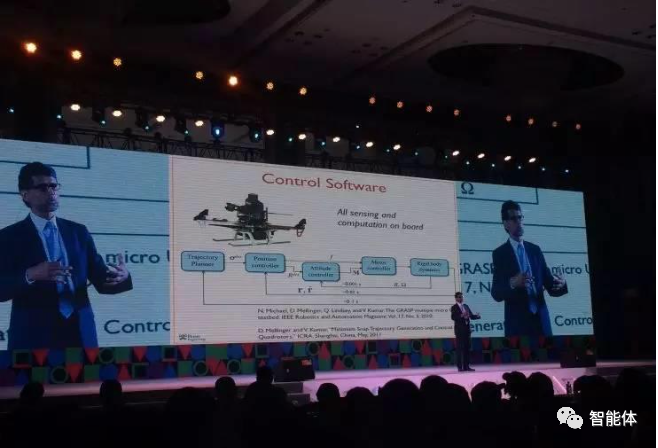
Phone——在手机运行的无人机控制器程序,它可以进行定位和路径决策。也就是说,无人机不需要携带太多笨重的检测设备部件,通过两块芯片,我们就可以将无用的重量转移至手机APP化解掉。这也是高通喜欢将无人机功能平台分解的原因。
利用好这样的技术,无人机能通过进行结构性飞行——有些地方干燥,有些地方潮湿,它都可以通过较好的计算来进行飞行控制。
未来,重型和轻型无人机的推进将依靠这个技术而推进。





