选自IEEE Spectrum、Science Robotics
作者:Evan Ackerman 等
机器之心编译
参与:微胖、李泽南、吴攀
最新一期的 Science Robotics 展示了机器人领域的新研究成果:以磁力远程驱动和控制的人体内微型机器人。本期的其它内容可在 http://robotics.sciencemag.org/content/2/3/eaal2845 查看。
控制机器人在人体内的运动有两种办法:试着打造一种复杂的自带推进和导航的微型机器人潜水艇(不过这类机器人很难做),或是打造响应磁场的小不点儿机器人(利用大磁铁从外部控制机器人的运动)。后一种方法要简单得多,不过有一个主要的不足:难以控制多个微型机器人。
问题在于:磁场因为是场,因此不易局限在某个特定区域。实际上,如果你在使用诸如一台临床 MRI 扫描仪来创造磁场,那么,无论磁场梯度如何,都会影响到 MRI 内部的所有东西,无论是单个微型机器人还是一群机器人。如果你想让两个不同的机器人做不同的事情,对不起,那就不走运了。
一个有希望的潜在解决方式就是让每个机器人彼此轻微差异化,这样,持续的控制输入就能对每个机器人产生并不一致的影响。不过,对于同质机器人(homogenous robots)来说,就要难得多。今天,发表在 Science Robotics 上的一篇论文(来自德国汉堡的飞利浦研究院,Philips Research in Germany)介绍了一种技术,可以利用磁场选择性地驱动单个机器人,或者这个机器人的某个组件,即使这些机器人都是同一材质制作的,并位于同一磁场中。
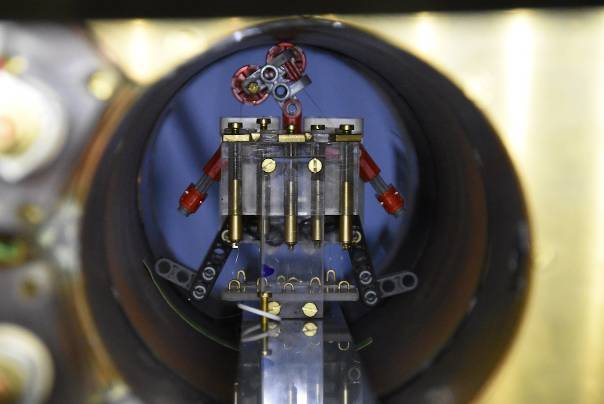
这是这一技术的运作原理:设备中的整体磁场中有一个洞,也叫自由场点(a free field point,FFP),也是多个磁场(每个磁场都是有独立线圈生成的)相遇的地方。在 FFP 里面,磁场梯度很低,没办法协助你移动物体,不过,却能帮助你不移动物体,因为你可以在适当的地方,通过调大磁场梯度,「锁住」不在 FFP 中的任何东西。然后,采用一个温和的旋转磁场,它可以旋转 FFP 中任何东西而不会下锁。通过来回移动 FFP,你就可以选择要锁住的东西以及要自由转动的东西。
在这一案例中,「锁」是一个利用磁场而一边倾斜的螺旋体(screws),这样它们就不能旋转,而 FFP 是零度倾斜区域,亦即螺旋体可以自由旋转。这一研究采用的硬件可以单个驱动螺旋体,而且这些螺旋体的间距可以低至 3 毫米左右。
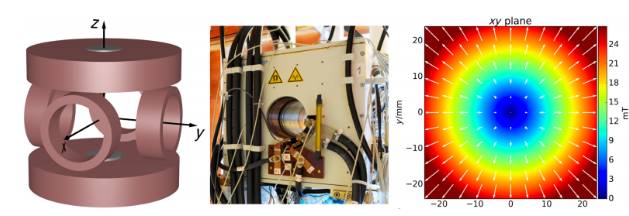
由磁场生成器(左)的图解可见有三套直角线圈,在 z 方向(灰色)有一个铁质内核。磁场生成器(中)有一个直径 12 厘米的钻孔。xy 平面(右)上理想磁场中心有一个 0 点,也就是自由场点(FFP),白色的箭头代表局部磁场向量。
研究人员建议了一大堆不同的办法来让这一技术发挥实际作用:
有一类应用是以几个分别加以控制的螺旋体驱动机制为基础的。在整形外科中,可用于移植,被移植部分的形状能够根据恢复过程发生变化。在诸如下肢增长或早发性脊柱侧凸等案例应用中,基于几个可控旋转体机制或为可延伸假肢或增长棒提供更高灵活性。另外,这一办法能够用于微流体中,其中,可以想象一种简单微型磁泵以及阀门,无需电力或机械连接,即可单独进行驱动。
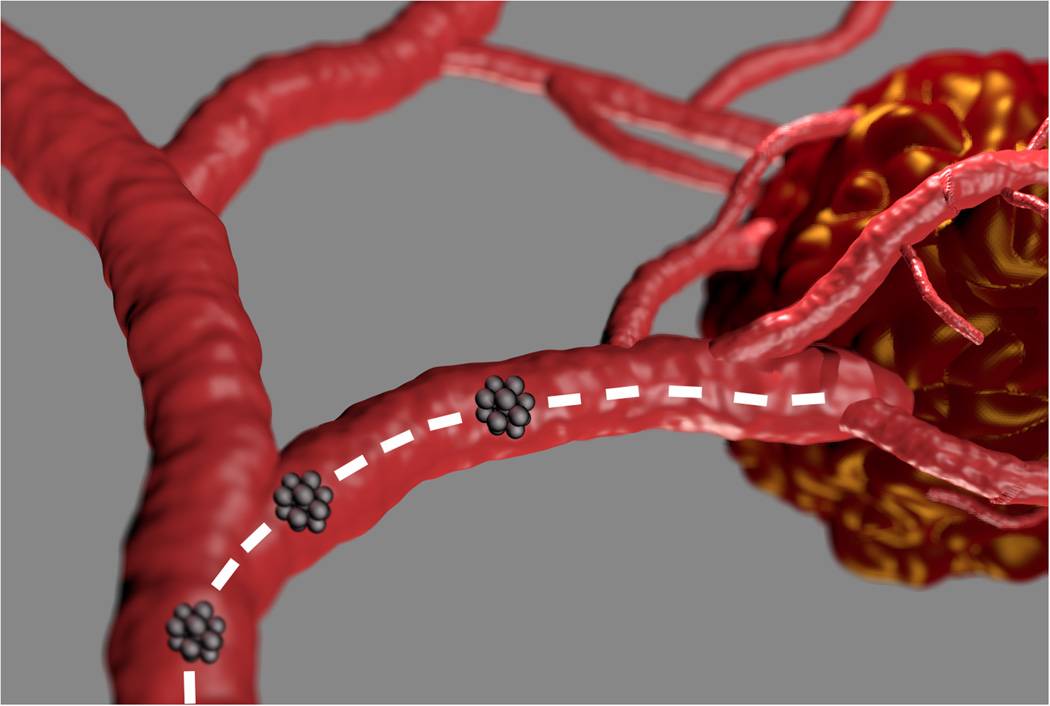
另一类使用情况与用于局部治疗实现的简单微型机器有关,比如遥控一个可注射磁性微型药丸释放药物。遥控可切换放射性种子是一类特殊案例。可切换开关的机器人种子(Switchable seeds)能让资源的使用有更长的半衰期或更高的剂量率,因为达到所需的剂量后,放射性就可以被关闭。除此之外,最终距离健康组织或敏感器官太近的移动种子可以被关闭。
使用带槽的螺旋盾,定向种子的远程调节方式可以被建立。这可能会让医疗领域中的精确用药和组织维护技术有进一步的提升。另外,我们证明了磁操纵可以达到微米级别的精确性。通过导管,我们可以把种子带入肿瘤和血栓的位置,完成任务后从血管中排出。在成像定位后,只有到达肿瘤位置的种子会被远程激活。
论文题目:相同的螺旋微机器的空间选择性的远程磁致动(Spatially Selective Remote Magnetic Actuation of Identical Helical Micromachines)
作者:J. Rahmer、B. Gleich 和 C. Stehning
摘要:磁微电机可以在人体内通过外部磁场的进行远程控制,这种特点使得它成为微创局部手术的绝佳选择。在很多治疗方法中,医生都需要依赖复杂的微型机械进行手术,但目前仍然缺少用于控制这些机械的可靠机制。在本研究中,我们提出了基于空间位置的螺旋形微型机械的选择性控制方法,该微型机械是由均匀的旋转磁场操作的,而空间选址是由强场梯度在锁定除位于内侧的所有机器后以取得小活动范围的能力。我们的 3D 选择性驱动的实验证明,以毫米为单位的运动尺度足以应付临床应用。螺旋微型机械的选择性控制可以提高微创治疗水平,并可能带来更灵活的局部药物递送系统或自适应的医疗植入物。随后,作为一个例子,我们提出了基于的肿瘤内分布式放射源选择性切换在癌症上使用自适应放射治疗的概念。
论文地址:http://robotics.sciencemag.org/content/2/3/eaal2845.full
最新一期 Science Robotics 的第二篇论文:
标题:超越成像:临床磁共振扫描驱动下的巨型和微型医疗机器人(Beyond imaging: Macro- and microscale medical robots actuated by clinical MRI scanners)

作者:Sylvain Martel
摘要:磁共振驱动有望用于医疗。
与 MRI 结合的磁共振驱动技术为微观和宏观的医疗机器人提供了很大潜力
论文地址:http://robotics.sciencemag.org/content/2/3/eaam8119.full
©本文为机器之心编译,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者/实习生):[email protected]
投稿或寻求报道:[email protected]
广告&商务合作:[email protected]









