根据《自然》发表的一篇论文
Locally noisy autonomous agents improve global
human coordination in network experiments
显示,将自主“机器人”编程为生成随机“噪音”,可以帮助一群人实现共同的目标。该研究认为在人类网络内的战略性位置添加产生噪音的机器人,可能有助于应对各种各样的问题,如解决量子问题和分类考古图片或天文图片。
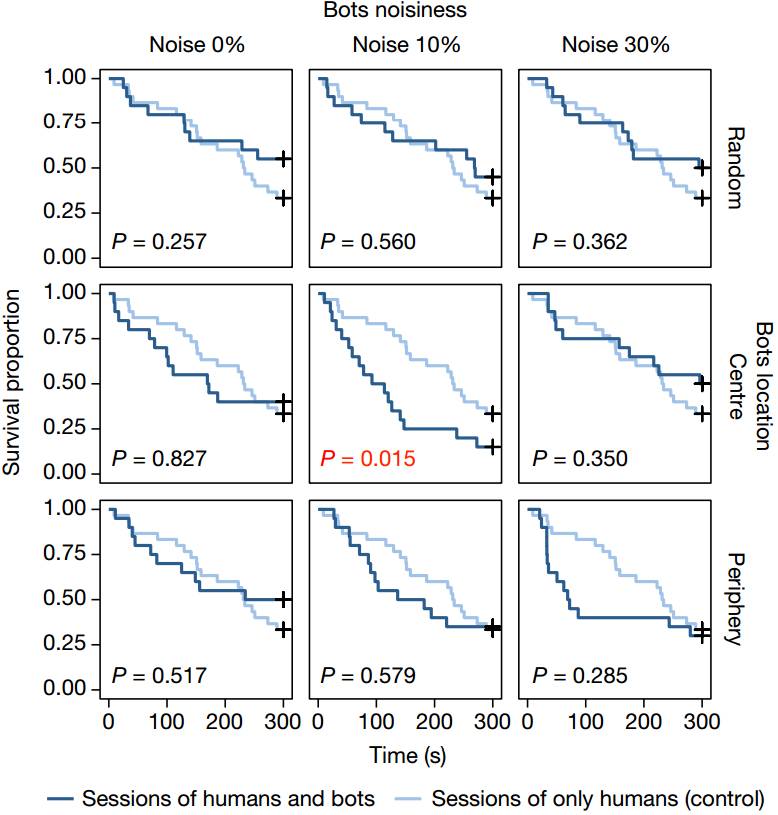
不同机器人噪音和位置下的未解决问题的生存曲线。
Shirado & Christakis
即使每个人的利益是一致的,但是在为实现共同的目标而集体行动时,仍会面临协调问题:个体为取得对自己最佳的解决方案所做的尝试可能对团队整体而言并不是最优的。
为了给这种情况建模,美国耶鲁大学的Nicholas Christakis与白土宽和
(Hirokazu Shirado)
邀请了一群人来解决一个网络颜色协调问题。这群人面对的是一个具有20个节点的网络,每一个节点可能有3种颜色选择,他们的集体目标是使每一个节点的颜色与相邻节点颜色不一样,但是参与者只能看到自己的节点及其相邻节点的颜色。
对机器人做编程处理使之展现低水平的随机噪音,然后将其引入这场博弈中的中心位置,结果发现团队的集体表现上升了,人们解决问题所耗费的时间缩短了。
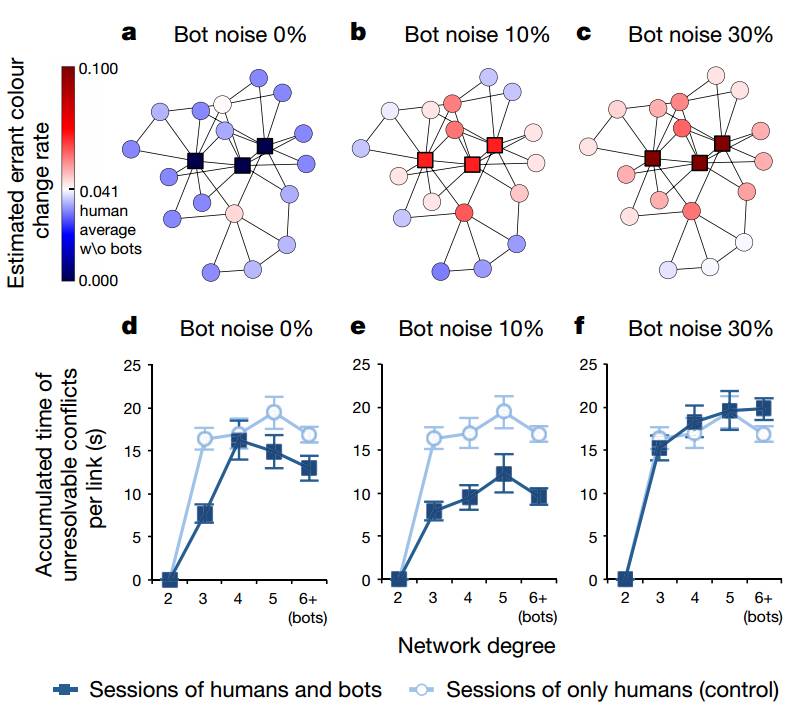
产生噪音的机器人对人类参与者行为的影响。
Shirado & Christakis
噪音,或者说进程中的无意义信息,通常被视为一种问题来源。但是在本研究中,行为噪音发挥的作用如同在网络中安插了已经知道如何解决问题的参与者。有趣的是,机器人不仅让任务变得简单,也影响了各参与者之间的交互方式。由此产生了效益级联,即使在人们知道他们是在与机器人交互时,也会出现这种效应。
ⓝ
点击“
阅读原文
”查看新闻与观点
Behavioural economics: Occasional errors can
benefit coordination
长按二维码阅读论文
Locally noisy autonomous agents improve global human coordination in network experiments