“可以不使用”意思是,也可以使用。
然而这里就应该不使用;
“可能不能接通”还说的过去,因为有时确实能接通,但这就属于概率问题了,所以很多公司也自行发过补充通告,对于管理的非精密进近,如果做了低温修正,就不要去飞了,但凡机组正常点都不会冒着这样的风险去执行进近;对于RNP进近图中给出的温度,如果低于该温度同样无法使用,如果在温度限制内,即使是零下,也不需要再进行低温修正,但该温度限制仅仅对航图上的最后航段进行保护,对于其他高度不做保护,所以按道理来说,其他高度的修正应该“按需”;
注:
温度修正说的是低温修正和高温修正
,日常飞行中我们大多都关注低温修正,其实高温修正同样需要注意,有些极端高温天气同样会导致管理的没法飞,真高会变高,下滑梯度就会更高,基准下降率嗷嗷高。
但为什么我们飞过很多高温的机场却没什么问题呢,因为标准的下滑角3°即便被影响也不会有太大的偏差,要关注的那种是本身它设计的下滑角就很大,3.5°这种:
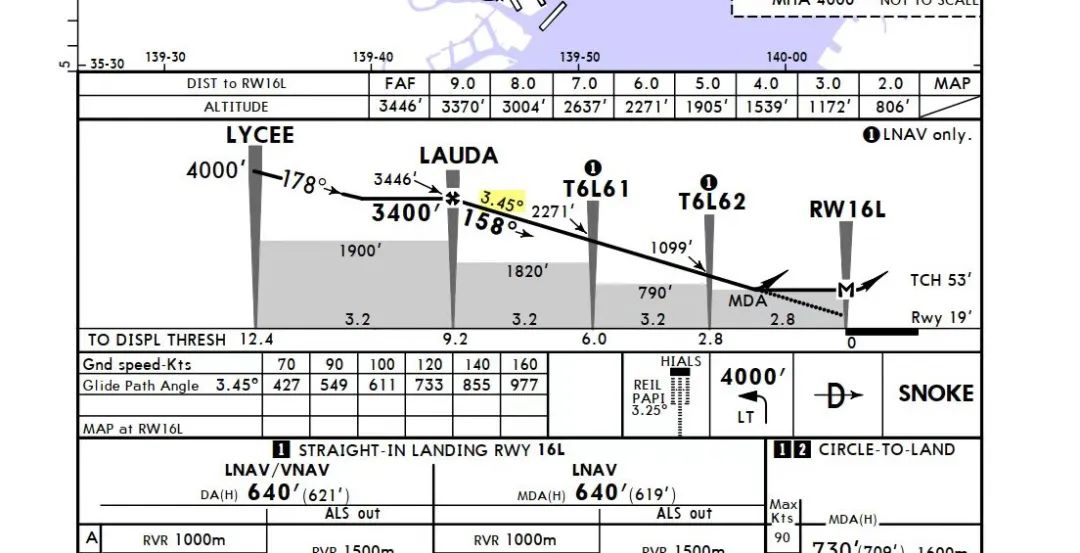
上图是东京机场的某个进近图,可以看到这下滑梯度已经很大了;国内机场也有类似这样的情况,比如丽江20号RNP/ILS等等,国内航图因为涉密问题就不和大家分享了,感兴趣的小伙伴可以自行查阅;
东京热(?)的时候那么基准下降率就会很高了,在DA之后很可能依旧需要1000ft的下降率;
这里衍生出来一个问题,针对标准喊话的1000ft/min“下降率”,我个人认为是应该参考基准下降率的,譬如今天的基准下降率就是700,、800、用1000作为衡量偏差喊话的标准就很正常,但如果今天的基准下降率就很高,就比如说在东京的极端温度,那1000ft的偏差检查手段明显就是不合适的,1200应该更加合适一些。对于上述观点,您觉得如果有问题可以在后台与小编讨论讨论。
3、
‐ 如果在最后下降点(FDP)之后出现TOO STEEP PATH(航径太陡),则不要使用FINAL APP引导进近。使用NAV FPA、TRK FPA或FLS进近。
‐ MCDU和图中最后垂直航径之间相差0.1度可以接受。
‐ MCDU和图中最后横向航迹之间相差1度可以接受。
对于RNP进近来说如果在F-PLN的FDP点之后出现TOO STEEP PATH,则不要执行LNAV/VNAV;
‐ 对于常见无线电NAVAID进近,MCDU和图中最后横向航迹之间相差3度可以接受。
4、
在进近中,在BRG/DIST处插入参考
跑道入口
以进行位置监控
。
进程页面的那个目的地输入的是跑道入口、跑道入口、跑道入口。
测距台的距离可以在ND右上角看到,不要输入到进程页面。
5、
下降时的检查:
气压基准.......调定
‐ 垂直引导需要一个精确气压设定。高度表之间最大可接受偏差是
100 ft
。
6、
下列所有条件都满足时,按压APPR 按钮:
‐ 允许飞机进近
‐ TO航路点为最后下降点。
再加一条:
下到截获高度之后再按压
,不然容易非预期的去追剖面。
或者你能...精准的...在这个范围内:
如果雷达引导或者申请直飞,那么也是有一定要求的:
第一种情况就是不管是雷达引导还是你自己申请,
在IF点之后如果航迹变化大于45°,这是不允许的,
小于45°可以保证飞机在转弯的时候不被甩出保护区,但大于45°就不一定了;
那么这时候有人问,我之前飞过的RNP还有直角转的呢,你怎么解释?
这就是图二的情况,确实有直角的,这也大于了45°,但这绝对不是雷达引导,或者说如果你自己申请去直飞,管制一定会拒绝,因为这是数据库整体调出的进近程序,是已经经过验证的,也就是说无论怎么转弯都可以确保飞机在保护区内,而直飞造成的后续转弯半径等问题变得不确切,所以谁也不敢担这个责任...
也就是说,第一种情况的战术干预是有条件限制的,第二种情况不属于战术干预,属于正常按照计算机自带的进近程序去完成目标;
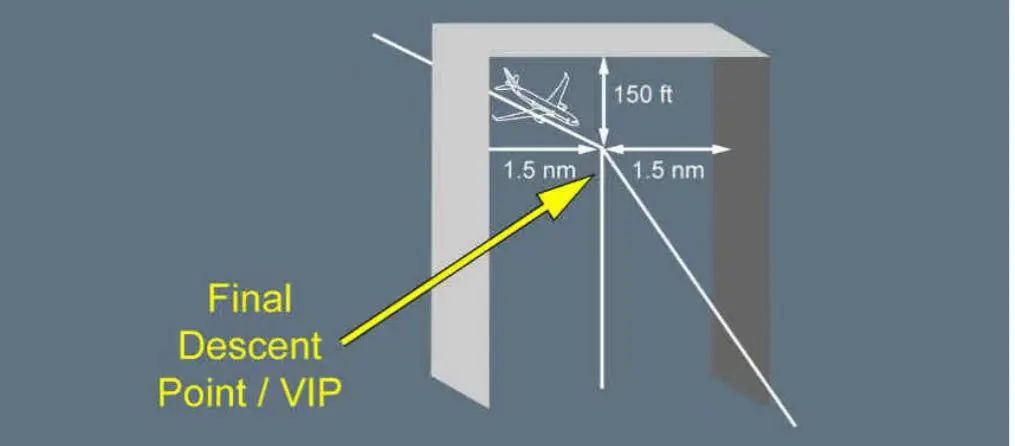
最后一点就是如果雷达引导直飞FDP点,也是不可以的,法规限制要求我们在FDP点前2nm去截获,但你也不能按照2nm这么飞,因为同样要考虑到一个转弯半径的问题,2nm只是限制,并不是你一点不加裕度的理由。
注:
上述内容是程序设计和管制指挥的要求,其实对于机组来说,我们只需要学会手册中提到的“DIR TO RADIL IN”就可以缓解,当然,多了解一点也不是一件坏事。
然后下一步:
APP NAV....... 检查预位或接通
FINAL......检查预位
‐ 检查PFD上显示V/DEV刻度。
‐ 在最后下降点处,ND上的一个
蓝色箭头
表示FINAL APP接通条件已满足。
在最后下降点:
FINAL APP........ 检查接通
复飞高度.......设置
飞行参数......MONITOR
‐ 监控ND上的偏航误差。
‐ 监控 PFD上的V/DEV指示。
‐ 根据图上的发布,交叉检查距离和高度。
‐ 如果按传统无线电导航设备程序进近,使用原始数据监控横向和垂直引导。
‐ 如果出现过量偏离,PM喊话(后面会总结)
在输入的MINIMUM
决断...... 监控或宣布
在最低标准以下,目视参考必须是主要参考直至着陆。
如果有足够的目视参考:
继续...... 宣布
最晚在MAP或AP最低使用高度(以先发生的为准):
AP...... OFF
‐ 在最低标准-50 ft时,如果AP仍在接通位,在FMA上会跳出DISCONNECT APFOR LDG(着陆脱开自动驾驶)信息以提醒机组自动着陆不可用。(新构型的飞机是在AGL150ft时有这个信息闪烁)
FD....... 按需
注:
从最低标准到MAP,FD提供额外指引。如果指引不相关或不跟随指引,必须关断FD。相关与否,自行感受(有些机场复飞点不在跑道头):









