中国科学院自动化研究所
(简称自动化所)成立于1956年,以智能科学与技术研究为主要定位,是我国首个“人工智能学院”的总体牵头单位。自动化所在复杂系统智能集成、模式识别、计算机视觉、语音语言信息处理、类脑智能、智能机器人、智能系统和智能芯片等领域具有显著优势,并形成了从基础理论到技术转化的完整创新链。
目前,
自动化所拥有多模态人工智能系统实验室、复杂系统认知与决策重点实验室、国家专用集成电路设计工程技术研究中心等国家平台,
以及一支实力雄厚的科研队伍,包括多名院士及各类高层次人才。

▍招聘单位:多模态人工智能系统全国重点实验室
多模态人工智能系统全国重点实验室(简称实验室)由原模式识别国家重点实验室和复杂系统管理与控制国家重点实验室合并重组而成,于2022年获得科技部正式批准建设,是首批20家标杆全国重点实验室之一。
实验室聚焦动态开放多模态人工智能系统,重点发展人形机器人、农业机器人、智能制造、网络安全等领域。

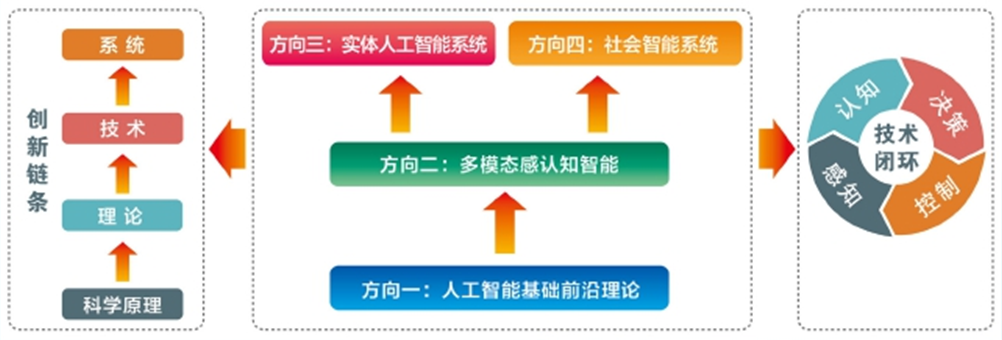
实验室面向国家重大战略需求,聚焦动态开放多模态人工智能系统,设置了人工智能基础前沿理论、多模态感认知智能、实体人工智能系统、社会智能系统等四个研究部。目标形成“科学原理 - 理论 - 技术 - 系统 - 平台”的
创新链条、“感知 - 认知 - 决策 - 控制”的技术闭环;建立类人智能水平和类人行为能力的多模态智能系统,提升人工智能系统在动态开放环境下的自主能力;打造多模态智能系统核心技术策源地、人工智能领域国际一流人才聚集地,成为相关领域国际著名科研机构。
目前,实验室已汇聚了一支高水平的多模态人工智能系统研发团队,现有固定人员110余人,流动人员300余人。其中中国科学院院士3人,国家自然科学基金杰出青年基金获得者12人,优秀青年基金获得者10人,电气电子工程师学会Fellow 11人。实验室人员在多个国内外学术组织中担任重要职务,并在多个国内外重要期刊担任主编、副主编。
近10年来,实验室获国家级奖励5项,其中国家自然科学奖二等奖3项,国家科学技术进步奖二等奖2项;获省部级奖项80余项。
▍边桂彬研究员个人简介
边桂彬,中国科学院自动化研究所研究员、博士生导师。研究方向为智能手术机器人。作为项目负责人,主持国家重点研发计划项目、基金委国家重大科研仪器研制项目和中科院创新交叉团队项目。发表SCI论文80余篇,获国际会议论文奖6项,入选ESI高被引论文2篇。
获授权国内外发明专利54项,参与起草国家标准1项。以第一完成人获中国仪器仪表学会技术发明奖一等奖,获团中央中青报“强国青年科学家”提名奖。担任科技部十四五“基础科研条件与重大科学仪器设备研发”、“智能机器人”专项专家组成员、中国科学院青年创新促进会第六届理事长、国家公共服务机器人标准化工作组专家委员和IEEE神经机器人系统技术委员会委员,入选国家级青年人才、中科院青促会优秀会员、北京市杰青和北京市科技新星。

▍招聘岗位及职责要求
工作地点:北京市
工作类型:校招职位(全职)
招聘岗位:机器人控制助理研究员
工作职责
1.负责智能机器人的功能与需求分析、技术路线规划、关键/核心部件的市场调研、指标确定与选型、总体控制系统方案设计与实现,输出完整详细的控制系统方案设计文档;
2.负责实现手术机器人的总体功能开发、调试与性能优化,包括但不限于:控制系统搭建、关节伺服参数调试与优化、末端位置的高精度与稳定性控制、末端力的柔性与快速响应性控制等工作;
3.负责机器人智能控制、自主控制算法研究与实现;
4.负责机器人的功能安全策略的系统设计与实现;
5.负责完成机器人的指标测试系统的搭建与测试整改工作,达到既定的性能指标;
6.负责研发过程的论文、专利、文档输出等工作;
7. 项目负责人安排的其他任务。
任职资格
1.机器人/电气/电子/自动化/机械/计算机等相关专业博士学位;
2.数学基础、机器人学理论扎实;
3.熟练掌握机器人运动学、动力学的建模与分析方法;
4.熟练掌握机器学习、深度学习、强化学习方法;
5.熟悉自动控制原理,经典控制理论,现代控制理论,能够熟练使用MATLAB对常见的机器人伺服系统进行建模、分析与控制优化;
6.熟悉常见机器人的电气控制系统架构及各组件的功能,能够独立完成机器人控制系统的搭建与调试工作;
7.精通C、C++等程序开发语言,熟悉伺服系统的性能调优,编程能力强;
8.具有电机伺服算法开发、机器人本体控制开发、力反馈控制开发、强化学习等相关科研经验者优先;
9.熟练操作Office Word/Excel/Ppt/Visio, Photoshop, AI, Altium Designer, CAD, 三维制图等常用软件。
简历投递
戳下方阅读原文,登陆网页并填写相关个人资料即可!








