该文章介绍了一种可重构极性转换异质结构晶体管(PCHT)阵列,用于单目三维信息重建。该技术可以从2D图像序列中重建3D信息,记录光强和时空视差关系,实现三维物体重建。该研究发表在Nature Electronic期刊上。文章还包含了图文介绍、结论与展望、文献信息以及上海昂维科技有限公司提供的服务。
该像素化PCHT通过选择性载流子激活,可以在n型、双极型和p型之间实现极性转换。这些像素化单元能够在传感器级别同时记录强度和时空视差配置。
可重构PCHT阵列与多终端寻址硬件架构的CMOS兼容集成,以及用于三维视差重建的算法方法。展示其在三维形态重建、二维深度场映射和多视角耦合的应用。
公司提供二维材料单晶和薄膜等耗材、器件和光刻掩膜版定制等微纳加工服务,以及各种测试分析服务。
为了方便各位同学交流学习,解决讨论问题,我们建立了一些微信群,作为互助交流的平台。
2.告知:姓名-课题组-研究方向,由编辑审核后邀请至对应交流群(生长,物性,器件);
欢迎投稿欢迎课题组投递中文宣传稿,免费宣传成果,发布招聘广告,具体联系人:13162018291(微信同号)

成果介绍
光场检测可用于收集超越传统基于强度的二维(2D)摄影能力的多维信息。利用物体的相位信息、衍射光波或多维探测中的反射方位角,也可以获得空间域的深度场信息。然而,在当前的光场检测中,相位或衍射场需要特定的光源来诱导光-物质相互作用以实现光学共振,而通过反射场全面获取信息则需要多孔径摄影。
有鉴于此,中科院半导体所的王丽丽研究员,娄正研究员提出一种
可重构极性转换异质结构晶体管(PCHT)阵列,用于单目三维信息重建
。该方法灵感来自“结构自运动”技术,可以从2D图像序列中重建3D信息。具体来说,作者提出了一种单目成像系统,能够在传感器级别同时记录光强和时空视差关系,利用双目视差原理从存储的动态图像序列中重建三维物体。该系统使用基于铟镓锌氧(IGZO)和二硒化钨(WSe2)的像素化光电晶体管,这些晶体管可以通过静电调制(极性转换)在n型、p型或双极晶体管模式之间切换,调节电输入的相位和振幅。该PCHT阵列采用兼容CMOS的多端口寻址架构,基于硅选择晶体管,能够实现静态成像和动态成像之间的转换。该系统不仅可以重建自由方位的空间形态,还能够将深度场压缩为平面图,并实现3D形态重建、2D深度场映射和多视角耦合。该项工作发表于国际顶级期刊
Nature Electronic
。
图文介绍
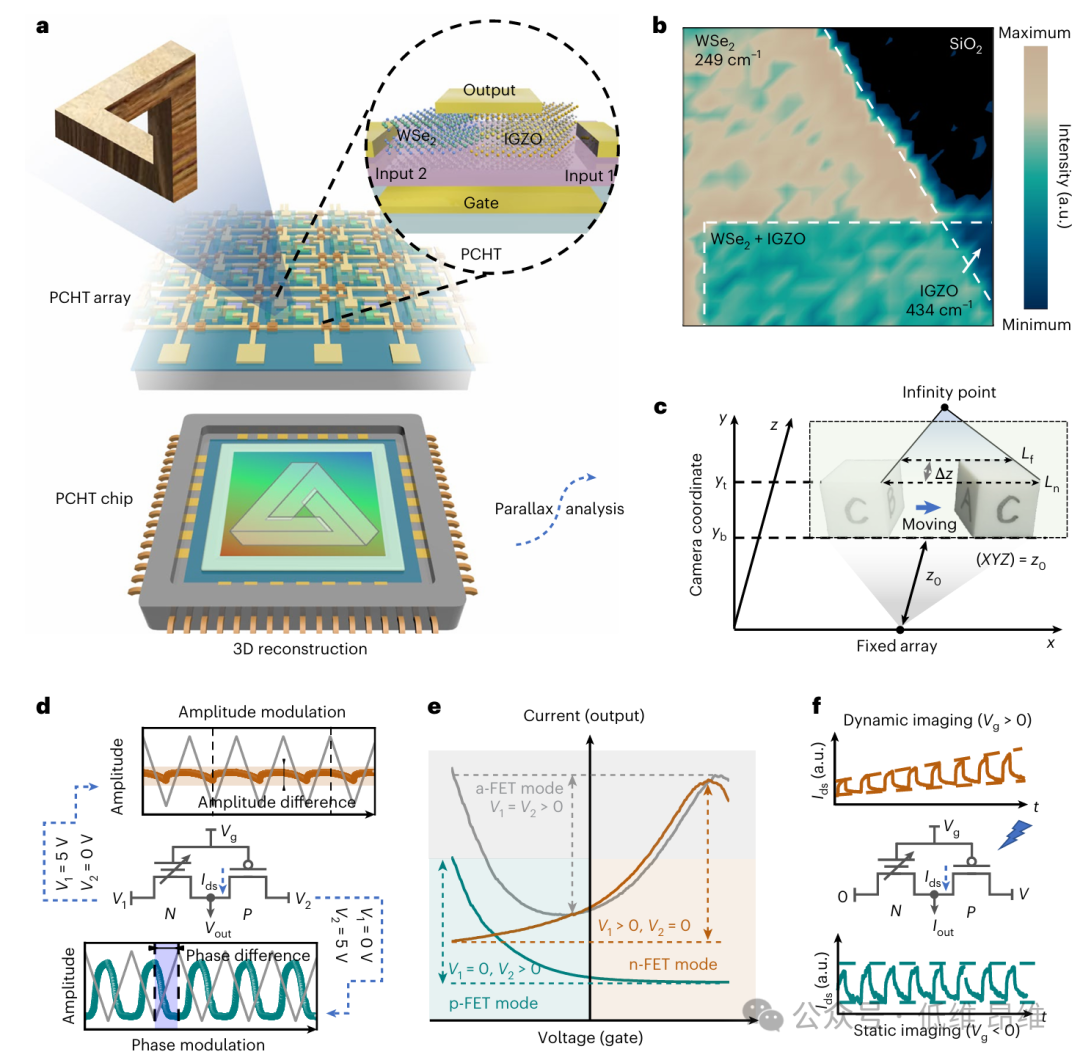
图1、可重构PCHT架构:
a)可重构PCHT、阵列和芯片的原理图。b)具有代表性异质结构的全面扫描拉曼光谱映射。c)三维视差重建原理,Ln为靠近成像平面两点之间的投影距离,Lf为远离成像平面两点之间的投影距离,yt为立方体顶部点的投影高度,yb为立方体底部点的投影高度,Z为深度,ΔZ为相对深度差。d)电输出随输入电压的变化,灰色线为输入波形,橙色为调幅输出波形,绿色为调相输出波形,V1表示输入1的电压,V2表示输入2的电压,Vg为门电压,Vout为输出端电压。e)可重构PCHT极性转换,虚线和箭头表示Id的动态范围。f)光入射时Ids输出的变化,虚线表示光响应的变化趋势。
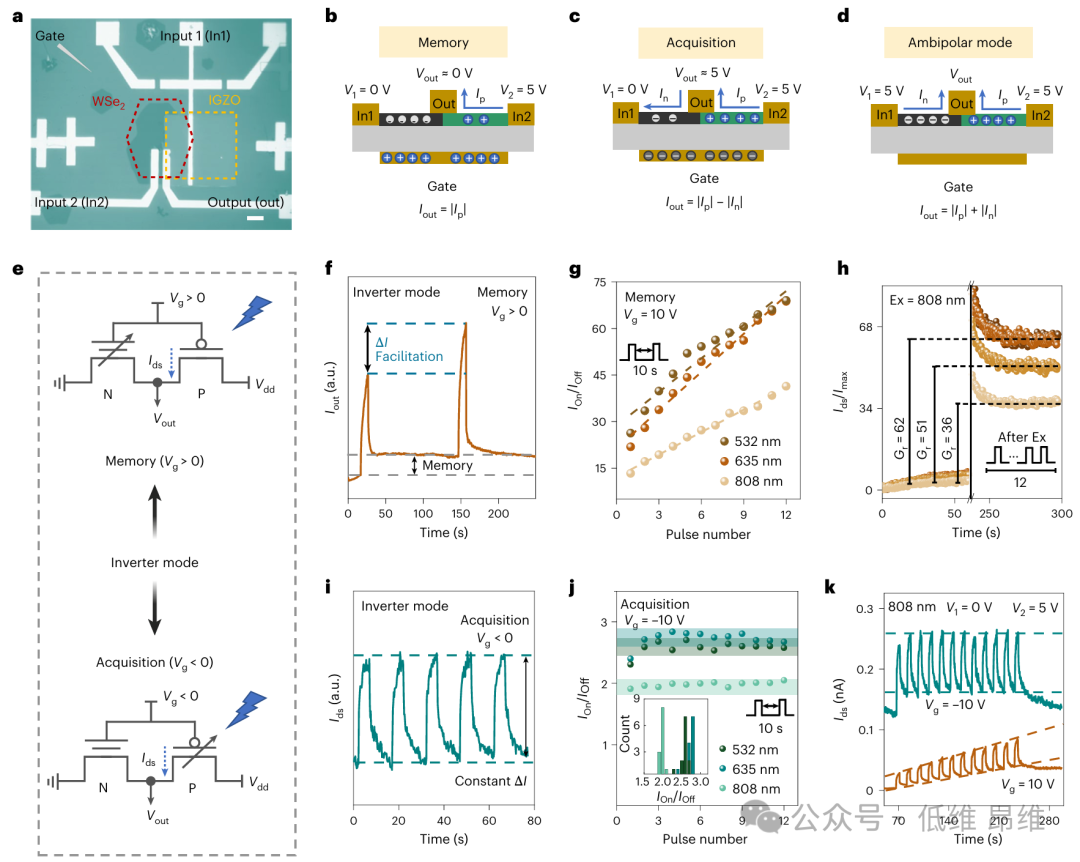
图2、PCHT模式依赖的光电性能:
a)图案化的可重构PCHT器件的光学显微镜图像。标尺,40 μm。b)具有时间依赖性存储的动态成像模式的运行机制模型,Ip为p型半导体中的电流。c)静态成像恒定感知模式的运行机制模型,In为n型半导体中的电流。d)双极模式的运行机制模型。e)可重构PCHT等效功能电路,Vg为栅极电压,Vout为输出端电压,P为P型半导体,N为N型半导体,Ids为通道内驱动电流。f)器件处于时间依赖记忆模式时,PCHT响应于光激发(532 nm, 0.38 mW/cm
^
2)的时变电流输出。g)器件处于时间依赖存储模式时波长和激发脉冲数相关的光响应。脉冲宽度为5 s,532、635和808 nm激发强度分别达到0.38、1.94和3.00 mW/cm
^
2。h)光激发后的保留存储,Gr为存储灰度,Ex为激发波长,Ids为光响应,Imax为饱和响应。i)PCHT在恒定感知模式下工作时,对光激发(532 nm, 0.38 mW/cm
^
2)的时变电流输出响应,ΔI为光电流的变化。j)恒定感知模式下, 器件与波长和激发脉冲数相关的光学响应脉冲宽度为5 s, 532、635和808 nm激发强度分别达到0.38、1.94和3.00 mW/cm
^
2。阴影区域表示设备在恒定感知模式下工作的开关比窗口。k) PCHT在波长为808nm光激发后的光电流响应Ids。在静态(Vg =
-
10 V)和动态(Vg = 10 V)模式下,脉冲宽度为5 s,激发强度为3.00 mW/cm
^
2。
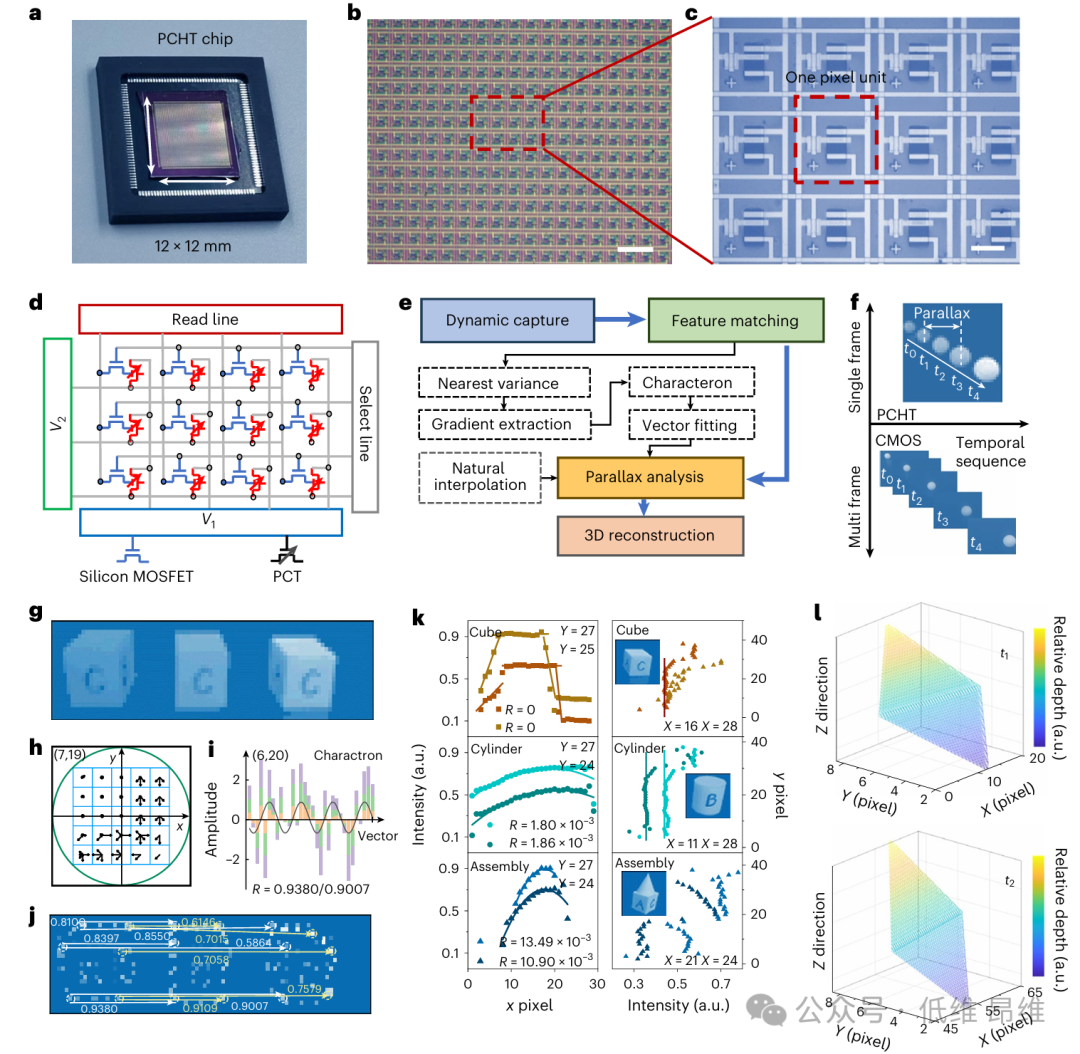
图3、三维视差重建方法:
a)单片集成可重构PCHT阵列的光学图像。b)集成PCHT阵列的低分辨率光学显微镜图像。比例尺:600 μm。c)单像素单位的高分辨率光学显微镜图像。虚线红框包含一个像素单位。标尺,100 μm。d)可重构PCHT阵列硬件架构示意图。e)三维视差重建的算法方法。f)在不同时间(t0 ~ t4),显示运动物体的传统CMOS成像与PCHT阵列成像的概念差异示意图。g)运动立方体在三个时刻的动态成像。h)OFG向量的分布。i) 与特征关键点相关的字符向量的超参数结构。j)特征匹配中特征关键点的分布与关联。k)通过二维光强重建的曲面,R为曲率半径,X为成像平面上的像素列,Y为成像平面上的像素行。l)不同构型的三维重构。
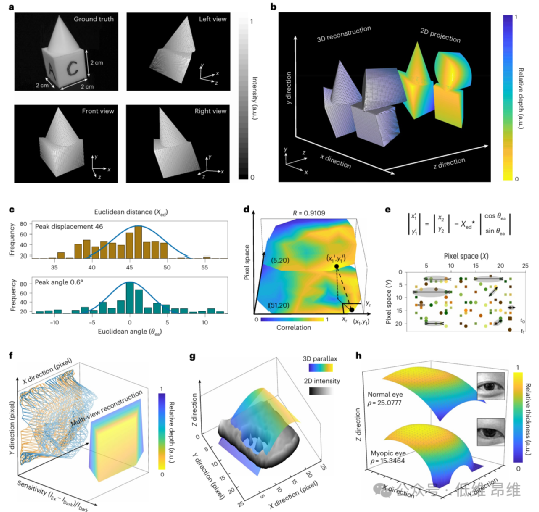
图4、三维视差重建演示:
a)复杂物体组装的立体形态重建。比例尺,分别在x,y,z上为10, 5和5像素。b)两种空间构型的二维深度场映射。c)欧几里得参数的统计分布。d)匹配关键点的相关空间。e)坐标变换方法(上)和坐标变换后的关键点分布(下)。f)多视角耦合演示,其中IEX为激发光电流,IDark为暗电流。g)二维强度对比成像与三维视差成像的比较。h)正常眼(顶部)与近视眼(底部)视网膜表面重建。ρ为重建眼睛的曲率半径。
结论与展望
本文报道了一种可重构的PCHT阵列,用于单目三维视差重建。该像素化PCHT通过选择性载流子激活,经过静电掺杂和电感应在n型、双极型和p型之间实现极性转换。这些像素化单元能够在传感器级别同时记录强度和时空视差配置。晶体管可以在静态成像的实时恒定感知模式和具有记忆的动态成像的时空平面配置模式之间切换。我们展示了可重构PCHT阵列与多终端寻址硬件架构的CMOS兼容集成,以及用于三维视差重建的算法方法。为了说明该系统的能力,我们将其应用于三维形态重建、二维深度场映射和多视角耦合。
文献信息
Li, Z., Xu, H., Zheng, Y.
et al.
A reconfigurable heterostructure transistor array for monocular 3D parallax reconstruction.
Nat Electron
(2025).
文献链接:https://doi.org/10.1038/s41928-024-01261-6
上
海
昂
维
科
技
有
限
公
司
现
提
供
二
维
材
料
单
晶
和
薄
膜
等
耗
材
,
器







