之前曾有人给自动驾驶提出过一个构想,可修建一条专门开自动驾驶汽车的高速公路,这条封闭式的高速路上可设置各种信号基站,一切设计都基于自动驾驶汽车的需求,以最大限度测试自动驾驶技术,推动研发。这个构想最终当然没有实现,因为并不经济,也不符合研发规律。不过近日,阿里巴巴与交通部公路科学研究院共同成立了车路协同联合实验室,探索自动驾驶和道路智能化解决方案。而今日,百度也宣布了
Apollo车路协同方案正式开源,成为全球首个在车路协同领域内进行开源的企业。Apollo开放平台将从车端的开源,升级为“车端”与“路侧”的全面开源。车路协同的问题被两家互联网公司搬上了台面。
发展无人驾驶没有迂回路径
当前主流的自动驾驶研发方向,似乎都将重点放在单车智能方面,也就是车端的自动驾驶技术研发上,谷歌、
uber、百度、通用、福特等大厂都是这个方向。因为全球的公路里程是个天文数字,其中仅中国就有公路里程约477万公里,其中高速公路约13万公里左右,位居世界第一。一项技术的普惠性是建立在通用性基础上,在自动驾驶技术被广泛接受之际需要考虑一个问题,到底是让这项技术去与庞大的公路网络系统进行衔接,还是让庞大的基础设施对自动驾驶技术做出妥协?
阿里达摩院人工智能实验室首席科学家王刚认为,
“车路协同则匹配研发‘聪明’的道路和交通设施,让车与路能完美配合,让自动驾驶更容易实现。,单车智能不是重点”换言之,阿里给出的答案是,车端智能不是重点,将主攻车路协同。车路协同能为自动驾驶上路增添一层冗余安全保障,如虎添翼,这一点上我非常认同。然而这并不代表在技术上简化单车智能,把高速路修得再好,没有技术过硬的车子跑在上面也没多大意义。

阿里选择的
“迂回路线”总结起来不外乎三点:1、阿里的达摩院今年4月才宣布入局自动驾驶,起步较晚,技术上已落后先行者太多,更不要说在实车上路测试验证环节上的车距。2、阿里熟悉商业生态玩法,但并不熟悉技术玩法,这等于是扬长避短。3、阿里的固有习惯是不偏好高成本技术解决方案,对技术迭代导致的成本下降耐心不够。基于这三点自身条件,阿里自动驾驶选择了这么一个“简化单车智能,主攻车路协同”方向,说白了其目的在于避开技术领先者的锋芒,用迂回方式抵御先发者带来的冲击。
自动驾驶的研发目前进展迅速,已进入
L4的超高度自动驾驶阶段,已有成车上路。L4是系统操控的自动驾驶,受一定具体工况所限,而到了L5的全自动驾驶阶段,汽车将可应对所有工况,实现真正的全自动驾驶。当前的自动驾驶解决方案成本较高,激光雷达和高精地图所需不菲,一台L4自动驾驶车辆需至少20万美元的各种设备才能跑起来。不过这只是在汽车还未投入实际商业应用的情况下,一旦商业应用普及开来之后,成本将会显著下降。所有的科技产品都是这个路数,自动驾驶应该也不例外。此外,某些技术如激光雷达的探测距离短、高精地图的更新频率达不到即时等,也是有待攻克的难题。如果以携大笔资金入局的投资者心态去看,现有的自动驾驶技术肯定处处是问题,就连数据传输的物理极限都是问题,因此必须要迂回去找解决方案,就像阿里的这个“靠车路协同弥补单车智能短板”一样。
但在技术研发者的角度来看,这些问题在未来并不是问题,因为信息技术发展的脚步从未被中断,只是有快慢,自动驾驶技术的研发本身并不仅仅是制造出一台能开的无人车,更是推动了现有问题的加速解决,而这些问题的解决对于技术发展本身是大有益处的。
阿里所说的
“单车智能不是重点”,是一种对无人车而言的反动,是本末倒置。如果投入巨资将一条公路进行信息化改造,然后再让技术上不成熟的无人车上去跑,这从本质上并不是在造无人车,而是在造智能公路。这样的战略不得不让人想到了“占道思维”,而并非是真正在系统性地解决未来的问题。
车路协同需要有
“车”也有“路”
若说到应该先有路还是应该先有车,这并不是一个鸡生蛋、蛋生鸡之类的困惑,而是两者互相依托,毕竟我们所构想的车路协同系统,是建立在无人驾驶的基础上,才能实现交通系统的智能化。车路协同,
“车”和“路”都是绕不开的环节。
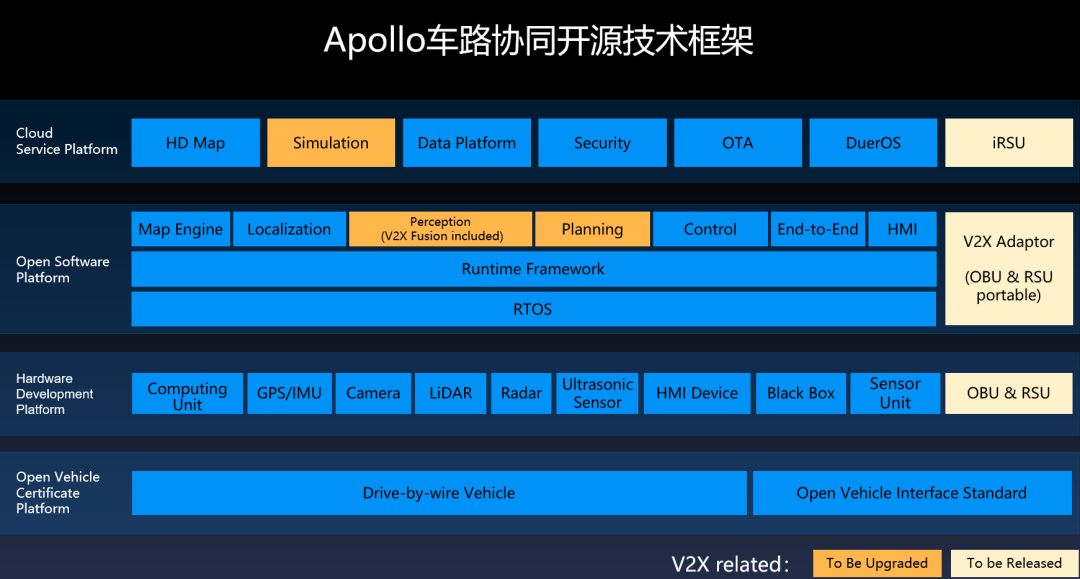
而百度提出的路径则是
“单车智能”与“车路协同”两条腿前行。百度认为“车路协同”是一个系统性工程,它涵盖三个方面:路侧、车端以及连接路侧和车端的通信联络,这三个方面都需要有很强的能力,缺一不可。而由于“车路协同”最终服务于车端、服务于自动驾驶,所以来自车端的经验和需求尤为重要。这也是为什么Apollo开放平台先是开源车端的自动驾驶技术,在车端积累了测试数据和生态能力之后选择开源车路协同方案。
一直以来,百度给业界的印象是专注于无人车车端智能的开发,但实际上车路协同是百度早就在布的局。百度早在
2016年就组建了团队研发V2X车路协同技术,成为国家03专项《5G支持ICT融合自动驾驶的关键技术》的牵头单位,并且其研发是全栈系统性研发,涵盖了软件、硬件和系统的开发。
对于车路协同系统来说,正印证了那句
“世上本没有路,走的人多了,便成了路”。
“路”怎么造,终归还是要看“车”,没有大量的无人驾驶汽车测试数据作为支持,“路”途不仅会十分颠簸,或许还会走到错误的方向上去。所以相比之下,百度的思路就顺利成章很多——先夯实车端基础,同步发力路侧智能。百度目前拥有国家多地签发的自动驾驶汽车路测拍照,允许上路测试,已经累计了大量的试验数据和测试结果。并且,百度在车端的技术、经验以及生态能力能够快速移植到路侧。“无人车”跑的多了,智能的“路”自然就成了。
车路协同是一个需要形成生态的大工程








