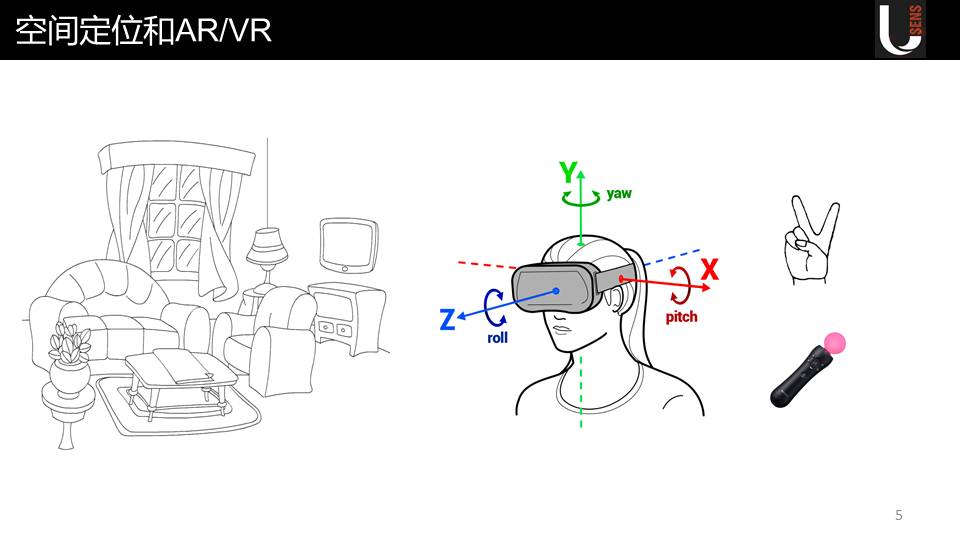
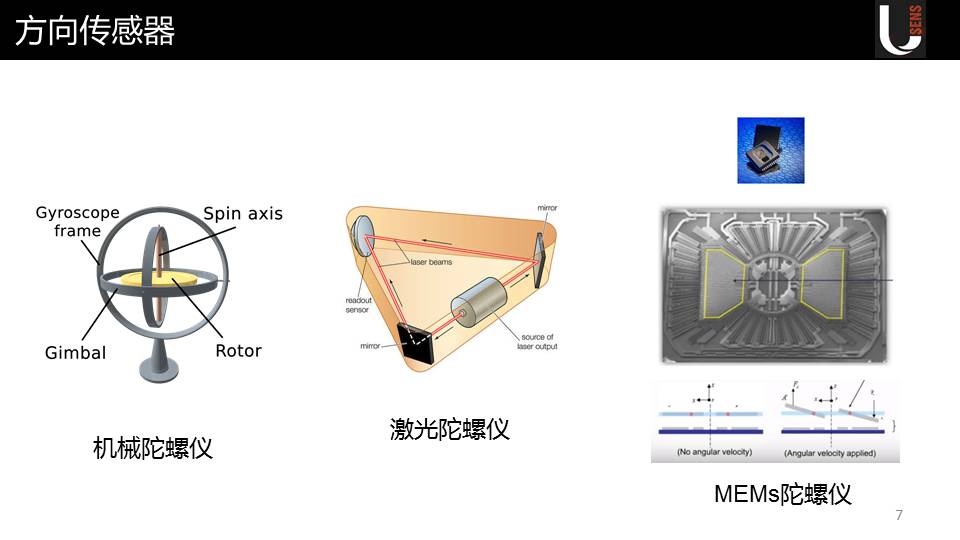
欢迎各位泡芙来到泡泡机器人公开课讲堂。今天我们邀请来了马赓宇,由他给我们带来关于“视觉惯性传感器的空间定位方法”的分享。在本节公开课中,主要分享内容如下:1. 各种空间定位方法的简介,会介绍各种硬件传感器,outside-in 和inside-out定位方式。 2. Visual+IMU融合的SLAM算法,会介绍IMU的数学模型,基于优化的Visual+IMU融合算法,基于滤波的Visual+IMU融合算法。
文章结尾有这次课程的视频及课件的下载链接方式哟~




【资源链接】
在微信平台后面回复数字“70课”即可获得“视觉惯性传感器的空间定位方法by马赓宇 ”的全 部资料。
【版权声明】
泡泡机器人SLAM的所有文章全部由泡泡机器人的成员花费大量心血制作而成 的原创内 容,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的 朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的 SLAM事业而努力!
【转载授权】
商业转载请联系刘富强([email protected])进行授权。普通个人转载,请 保留版权声明,并且在文章下方放上“泡泡机器人SLAM”微信公众账号的二维码即可。
【编辑】游振兴