空间机器人,作为一种典型的智能操作系统,其应用正逐渐改变航天运输、在轨建造、在轨维护、星球探测的传统模式,是未来无人、载人航天任务的重要使能手段之一。在载人的航天探索活动中,空间机器人担任了载人前的探路者、载人活动中的助手、载人活动后的维护者的角色;在无人的航天科学探索活动中,机器人更是有效扩展了人类的活动和操控范围。
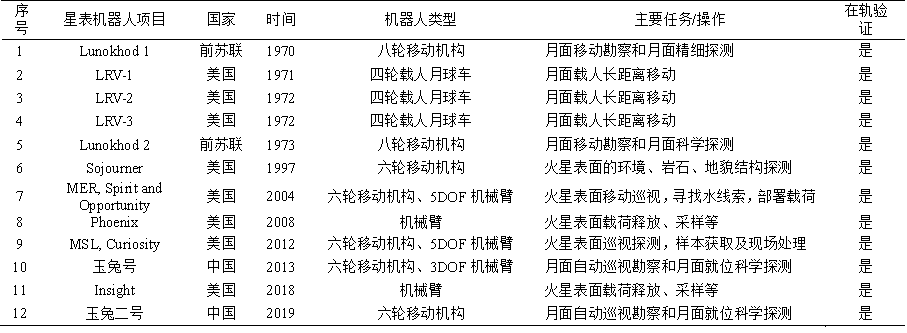
数以百计的空间机器人系统的样机研制或概念设计,其中有公开报道的14类空间机器人系统完成了在轨运行任务或经历了飞行验证,如表 1。星表空间机器人方面,目前成功着陆于月球及火星,成功开展巡视移动或机械臂操作作业的星表机器人如表2所示。

3 技术难点与研究进展
随着人类在空间探索领域的不断深入,在轨服务与维修、在轨组装、星球探测等空间操控任务的逐渐复杂化,且新型在轨操控任务需求不断出现,对空间机器人的发展和应用提出了新的技术挑战。
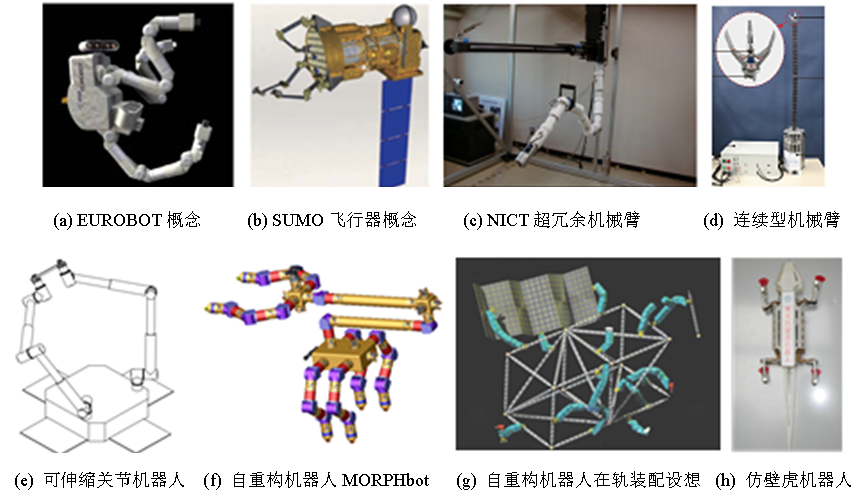
针对后续空间机器人任务及功能需求,空间机器人在机构构型上的技术挑战主要体现在:1)进一步增强空间机器人操作的灵巧性和精度,具备开展精细化操作的能力;2)进一步增加对大型航天器广域工作空间的操作覆盖能力,进一步增加对狭小空间的操作可达能力;3)针对复杂多变、操作尺度不一的任务及多样化的环境,机器人具备可灵活、可靠、自主地达到期望构型的能力和方法。文章重点介绍了国内外针对空间应用在多臂、可重构、超冗余、仿生机器人方面的典型工作。
针对空间机器人后续应用对驱动关节的需求,机器人驱动关节的技术挑战主要体现在:1)提高驱动关节力矩感知、绝对位置感知能力;2)关节进一步轻质化,提高关节输出功率密度;3)提高驱动关节应对外部力时的柔顺能力。文章重点介绍了轻质力控制关节、变刚度关节等在空间机器人关节应用方面的研究进展。
随着空间操作任务的复杂化,具有多种功能的可切换工具及多指灵巧手也开始了在轨的演示验证。空间机器人末端抓取与操作的技术挑战主要体现在:1)进一步提升对非合作目标的抓取能力;2)进一步提供多功能、精细化维修维护操作;3)进一步提供近似人的通用化的抓取和操作能力。

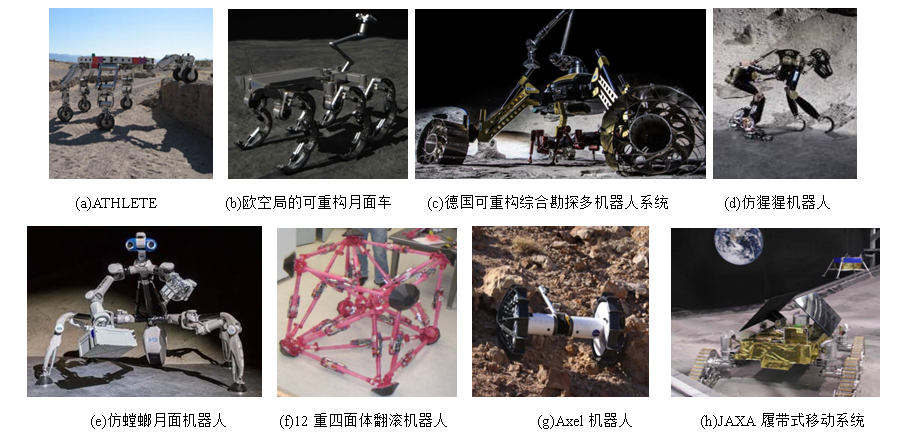
针对后续深空探测及载人探测任务的需求,空间机器人在行走移动的技术挑战主要体现在:1)在极端环境条件下提供适应能力更强的悬架及移动机构实现高速度、长距离的星表移动;2)提供陡坡、深坑、熔岩管道等极端地形的进入及通过能力;3)在有限感知、能源及计算能力的限制,星表图像纹理不丰富、缺少前验信息等不利条件下,提供高可靠、高实时性、高自主性的星表导航能力。文章主要介绍了新型机器人移动机构及自主导航方面的研究进展。
感知和认知的主要技术挑战在于:1)发展新型空间机器人传感器,提高三维感知的速度、分辨率,并有效降低传感器的尺寸、重量及功率;2)复杂光照条件下非合作目标、自然物体的识别与位置测量;3)复杂操作过程中力和接触感知;4)多传感器的集成及数据融合。
空间机器人动力学、仿真与控制面对的主要挑战在于:1)多应用场景下复杂异构、同构多机器人集成系统的建模;2)航天员与机器人在同一现场的高安全性人-机系统动力学,机器人与操作目标、操作环境及航天员接触的动力学与控制;3)漂浮基座空间机器人对非合作目标抓捕的动力学控制。
空间机器人是实现空间操控自动化和智能化的使能手段之一。在当前在轨应用及验证的基础上,未来空间机器人的应用方向可简要概括为空间目标的抓捕与移除、高价值目标的在轨服务与维修、空间大型构件的在轨组装及星球移动与作业探测。
为应对任务需求对空间机器人智能化、高精度、力柔顺、高安全性的要求,空间机器人还需在新型机构构型、轻量化柔顺关节、多功能灵巧末端操作、高机动性自主行走移动、多通道感知认知、动力学与控制等方面开展进一步的基础研究和关键技术攻关。
团队成员主要来自中国航天科技集团有限公司空间结构与机构技术实验室、空间结构与机构国防科技重点实验室(筹)。重点实验室立足国防战略目标和装备技术需求,开展探索性、前瞻性的基础及应用研究,支撑国防科技创新发展,推动我国在空间结构与机构技术领域的科技进步。重点实验室的主要研究方向涵盖空间结构与机构设计理论与方法、动力学与控制、空间机构智能操控、在轨组装与构建等。
孟光,现为上海航天技术研究院高级技术顾问、上海交通大学机械动力工程学院教授,主要研究方向为机构动力学、空间
张崇峰,现为中国航天科技集团有限公司空间结构与机构技术实验室主任,主要研究方向为空间对接机构、空间机器人。
韩亮亮,现为上海宇航系统工程研究所高级工程师,主要研究方向为空间智能操控机构、空间机器人。